ServiceManual_UR3_zh_3.2.6.pdf - 第59页
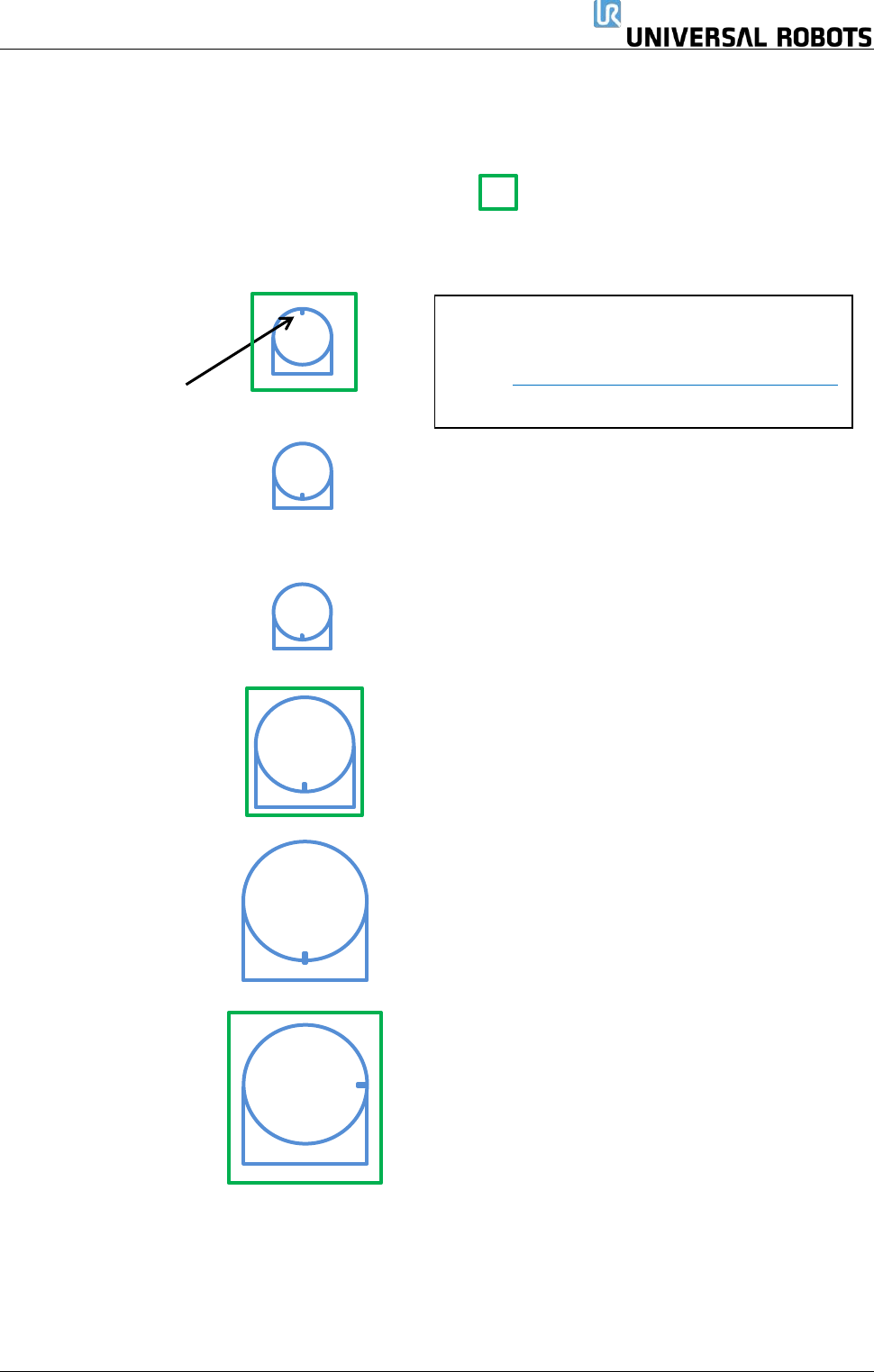
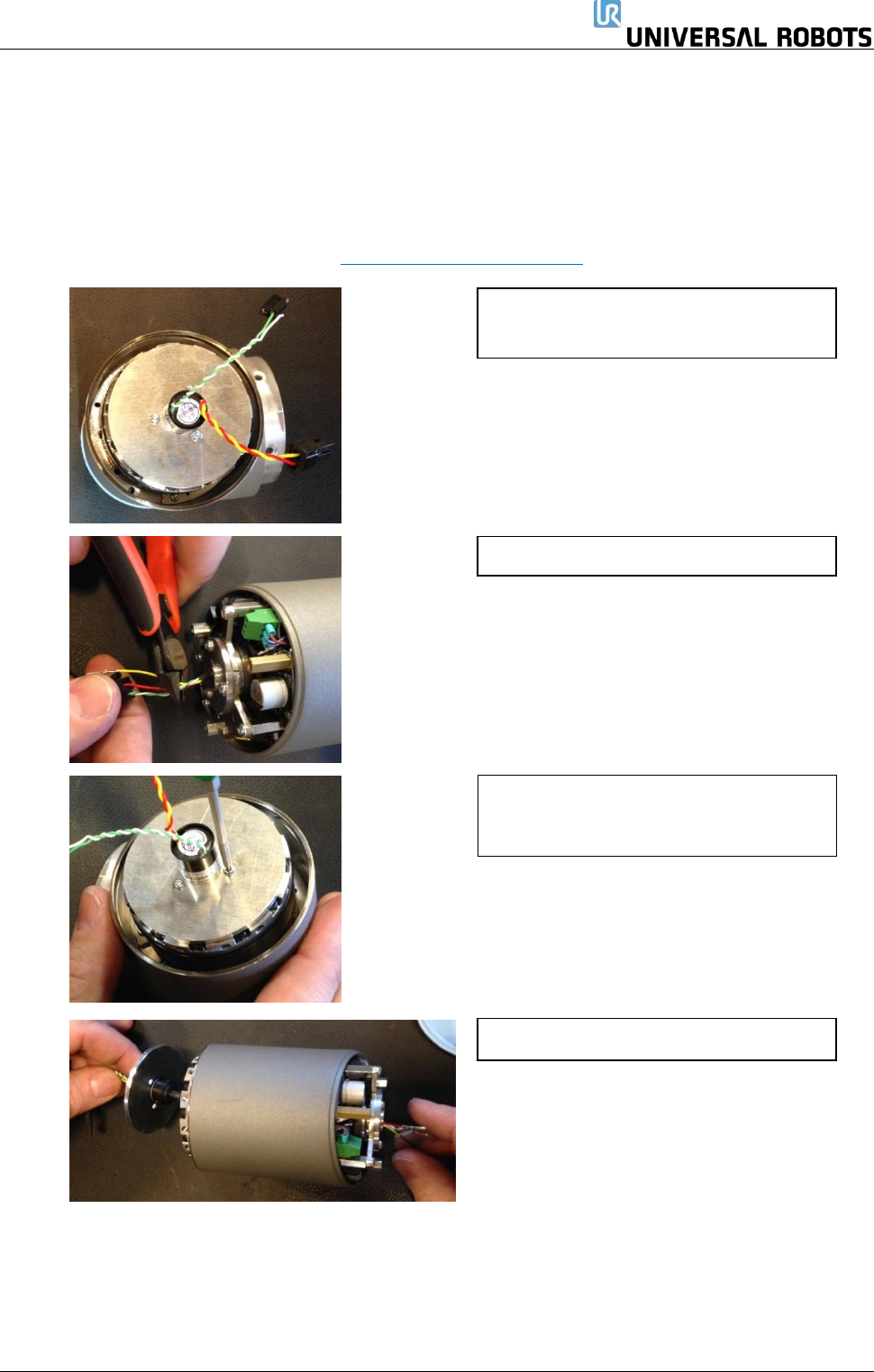
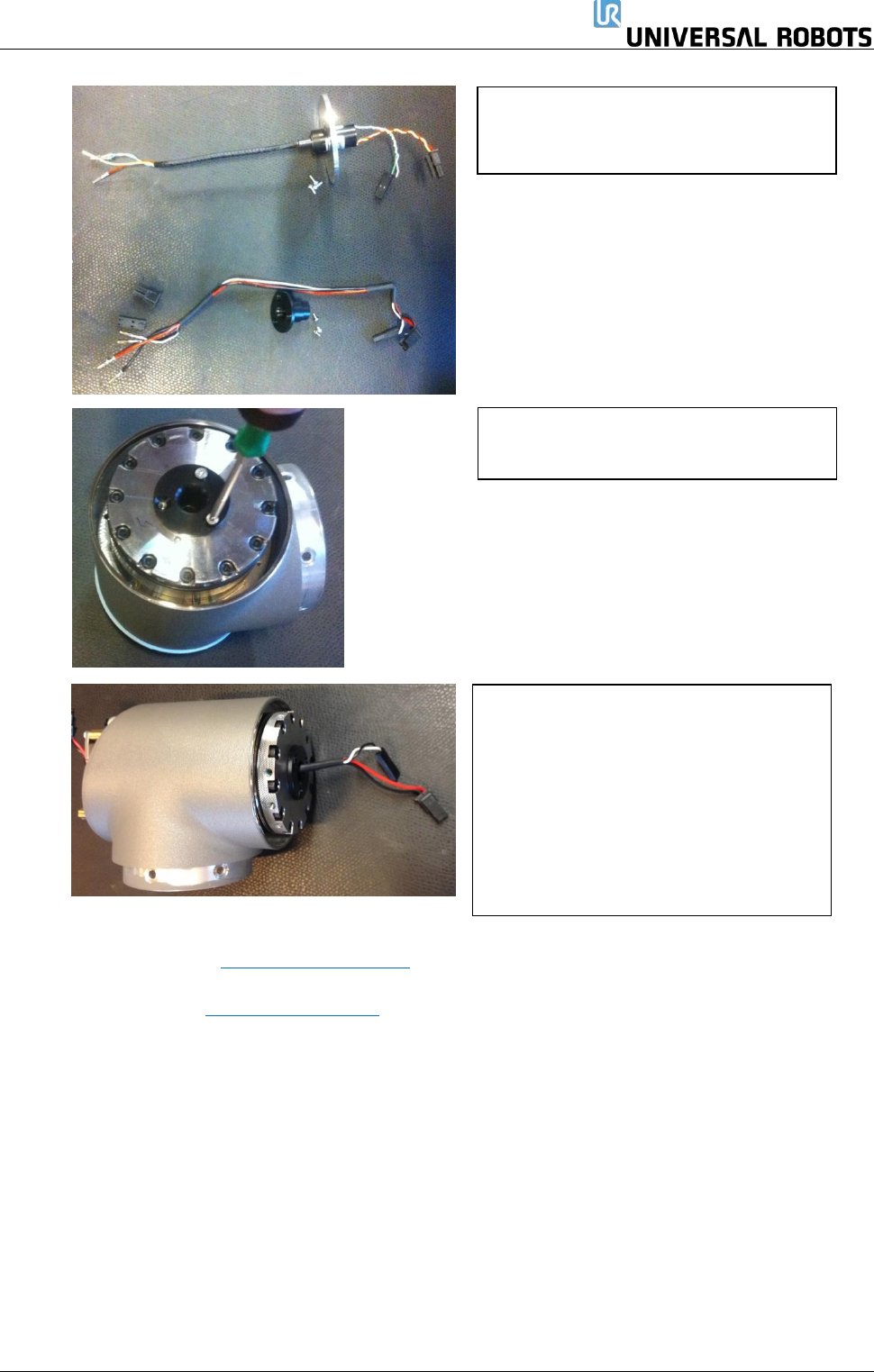
保留所有 权 利 59 Servicemanual_UR3 _en _3.2.6 3.1.19 将手腕 3 修改为手腕 1 或手腕 2 1. 必须更换机械零 件。 2. 必须改变输出法 兰的方向 3. 必须修改关节标 识。 使用防静电指引,修改 手腕,请参见: 3.0.0 处理 易受静电损坏零件 手腕 3 具有滑环,用于工具安装支 架 的无限转动。 剪断滑环的电线 旋开滑环 (使用 T8 螺丝刀) 轻轻取下滑环
保留所有 权 利 59 Servicemanual_UR3 _en _3.2.6 3.1.19 将手腕 3 修改为手腕 1 或手腕 2 1. 必须更换机械零 件。 2. 必须改变输出法 兰的方向 3. 必须修改关节标 识。 使用防静电指引,修改 手腕,请参见: 3.0.0 处理 易受静电损坏零件 手腕 3 具有滑环,用于工具安装支 架 的无限转动。 剪断滑环的电线 旋开滑环 (使用 T8 螺丝刀) 轻轻取下滑环