3OM-1053-002.pdf - 第275页
*3 *3 *3 *3 *3 自動運転停止機能 自動運転停止機能 自動運転停止機能 自動運転停止機能 自動運転停止機能 自動運転停止機能を“使用する” 、 ”使用しない”を設定する データです。 自動運転停止機能“使用する”に設定した場合( 標準) 装置上に基板が 1 枚もないイニシャライズ状態で、 “始動”ボタ ン“ON ”により自動運転に入り、前工程からの基板搬送待ちで “待機中”の際、前工程運転中信号の O FF を検出してその状…

••
••
•
シートの構成シートの構成
シートの構成シートの構成
シートの構成
*1*1
*1*1
*1
基板移載基板移載
基板移載基板移載
基板移載
基板の搬送方向を設定します。
“L→R”
基板が左から右に流れます。
“R→L”
基板が右から左に流れます。
設定を変更した場合は、再度、原点復帰操作が必要です。
*2*2
*2*2
*2
排出優先機能排出優先機能
排出優先機能排出優先機能
排出優先機能
基板排出動作の排出優先機能を“使用しない”、“使用する”を
設定するデータです。
排出優先機能“使用しない”に設定した場合(標準)
XY テーブル上の装着完了仕上がり済み基板の排出は、次の基板
の XY テーブル部への移載と一緒に行われます。
Fig.3E41
図の A 部に、次の基板がくるまで XY テーブル上の仕上がり済み
基板は待機となります。
排出優先機能“使用する”に設定した場合
XY テーブル上の基板に装着が完了し、XY テーブルが原点に戻っ
たときに、A 部には基板がなく,コンベア搬送も起動していな
い場合には、排出優先機能にしたがい、基板移載を作動させて
後工程への基板(仕上がり基板)排出を実行します。
前工程装置とのラインバランスが合わず、仕上がり基板の滞留
(XY テーブル上)をさける場合にはこの方式が有効です。
0301-005 5-50 AGH01JDTP
3.3 “運転パラメータ”タブ
*3*3
*3*3
*3
自動運転停止機能自動運転停止機能
自動運転停止機能自動運転停止機能
自動運転停止機能
自動運転停止機能を“使用する”、”使用しない”を設定する
データです。
自動運転停止機能“使用する”に設定した場合(標準)
装置上に基板が 1 枚もないイニシャライズ状態で、“始動”ボタ
ン“ON”により自動運転に入り、前工程からの基板搬送待ちで
“待機中”の際、前工程運転中信号の OFF を検出してその状態が
2 秒間継続したとき、運転を停止します。
装置上に基板がなく、しかも前工程が自動運転していない場合
は基板が送られてくる可能性はなく、自動運転を継続する必要
がないとの判断に基づきます。
装置上の基板を処理し、装置上に他の未処理基板が 1 枚もない
状態で、処理済み基板を後工程へ排出完了時、前工程が運転停
止状態にある場合は自動停止します。
他社装置との接続では動作しない場合もあります。
*4*4
*4*4
*4
前工程の排出方式前工程の排出方式
前工程の排出方式前工程の排出方式
前工程の排出方式
前工程の基板排出方式に合わせて設定します。
コンベア
コンベアによる基板授受での前工程のワーク搬送信号に連動し
て供給コンベアが作動します。
ワーク搬送信号が途切れると、供給コンベアは停止します。
プッシャー
プッシャーで強制的に前工程より供給コンベアに送られてくる
ケースでの基板授受対応方式です。
供給コンベア入り口側に基板検出センサ(プッシャ用)がない場
合は、“プッシャー”設定をしないでください。
SMEMA (使用不可)
SMEMA 規格による搬送 I/F を行います。
コンベア 2
コンベアにある基板授受を“ワーク要求信号”のみで行うこと
ができます。
コンベア 3
コンベアによる基板授受での前工程のワーク搬送信号に連動し
て供給コンベアが作動します。
ワーク搬送信号が、一定時間途切れても、供給コンベアは作動
し続けます。
0301-005 5-51
AGH01JDTP
3.3 “運転パラメータ”タブ
*5*5
*5*5
*5
供給コンベア供給コンベア
供給コンベア供給コンベア
供給コンベア
タイマー 1[秒]、タイマー 2[秒]、停止タイマー[秒]
供給コンベアの設定です。
タイマー 1[秒]
前工程との基板授受での供給コンベアの動作制限時間を設定し
ます。
供給コンベアの動作している時間を計り、基板の引っかかり異
常の監視に使用されます。
(a) 設定は、前工程装置との基板授受搬送に要する時間
に 2 秒程度加算したデータを設定します。
(b) データの入力範囲は“0 ∼ 99 秒”です。
タイマー 2[秒]
供給コンベアによる基板の装置内搬送における供給コンベアの
動作制限時間を設定します。
供給コンベアの動作している時間を計り、基板の引っかかり異
常の監視に使用されます。
データの入力範囲は“0 ∼ 99 秒”です。
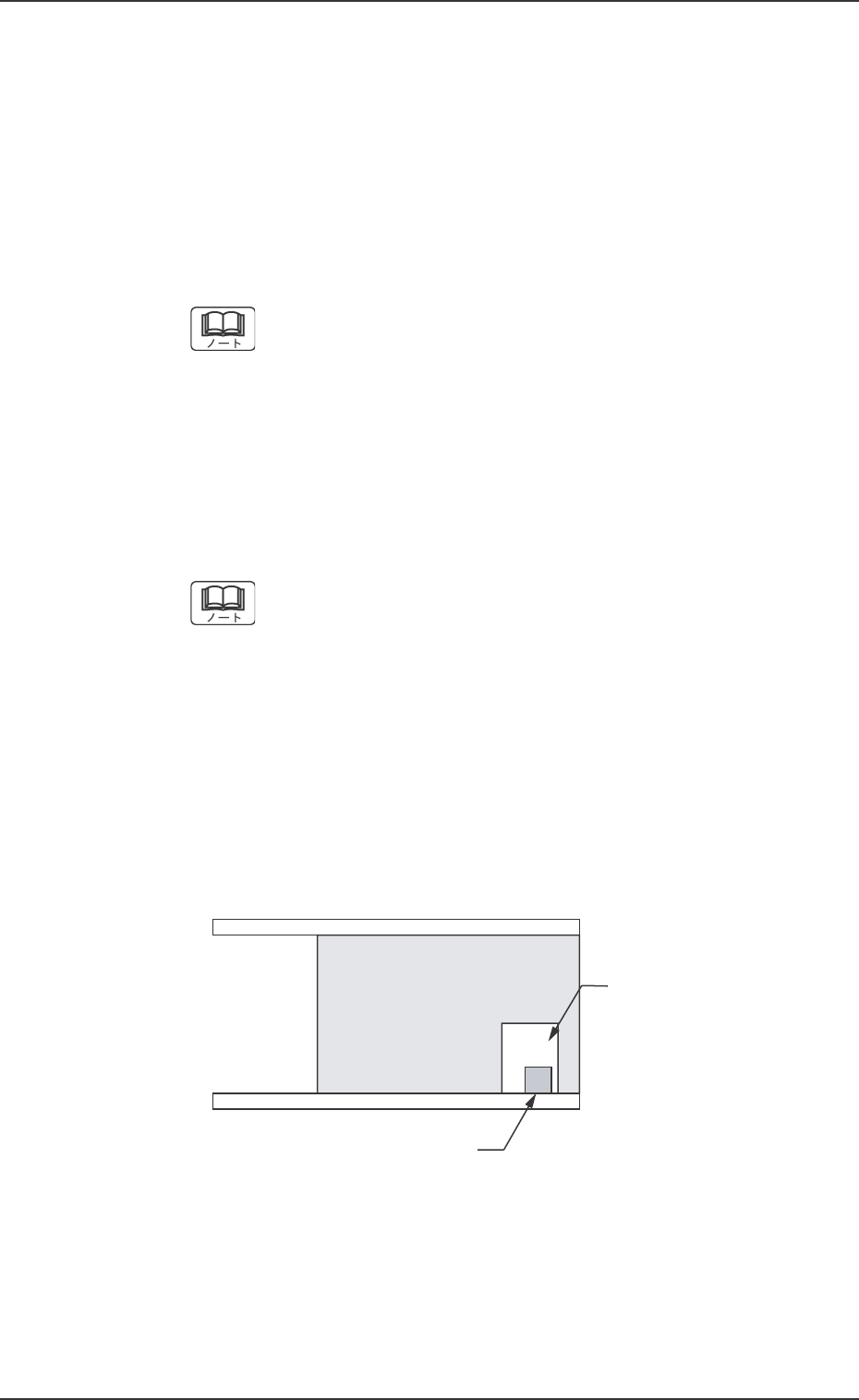
停止タイマー[秒]
供給コンベアのバッファ位置のセンサが基板を検出してから、
コンベアが停止するまでのディレー時間を設定します。
以下の図のような基板の場合に、フォトセンサが基板を検出
し、停止した際に、ちょうど基板パターンの隙間で基板が停止
してしまうと基板なしと判定してしまうので、ディレータイマ
を設定します。
Fig.3E42
ࡈࠜ࠻ࡦࠨ
ಾࠅ߆߈
ၮޓ᧼
0301-005 5-52 AGH01JDTP
3.3 “運転パラメータ”タブ