3OM-1053-002.pdf - 第278页
停止タイマー(バッファ 2)[秒 ] 排出コンベアのバッファ 2 位置のセンサが基板を検出してか ら、コンベアが停止するまでのディレー時間を設定します。 *8 *8 *8 *8 *8 排出インターバルタイマー 排出インターバルタイマー 排出インターバルタイマー 排出インターバルタイマー 排出インターバルタイマー [ [ [ [ [ 秒 秒 秒 秒 秒 ] ] ] ] ] 後工程への排出方式が“インターバル”に設定されている場合 に排出イ…
*6*6
*6*6
*6
後工程の排出方式後工程の排出方式
後工程の排出方式後工程の排出方式
後工程の排出方式
後工程装置との基板授受を設定します。
標準
後工程装置が当社製の装置に接続した場合は、“標準”に設定
してください。
コンベアによる基板の授受で後工程のワーク要求信号 ON を条件
にワーク搬送信号を ON して基板を排出します。
基板排出動作開始後、所定時間内にワーク要求信号が OFF しな
い場合は、異常停止します。
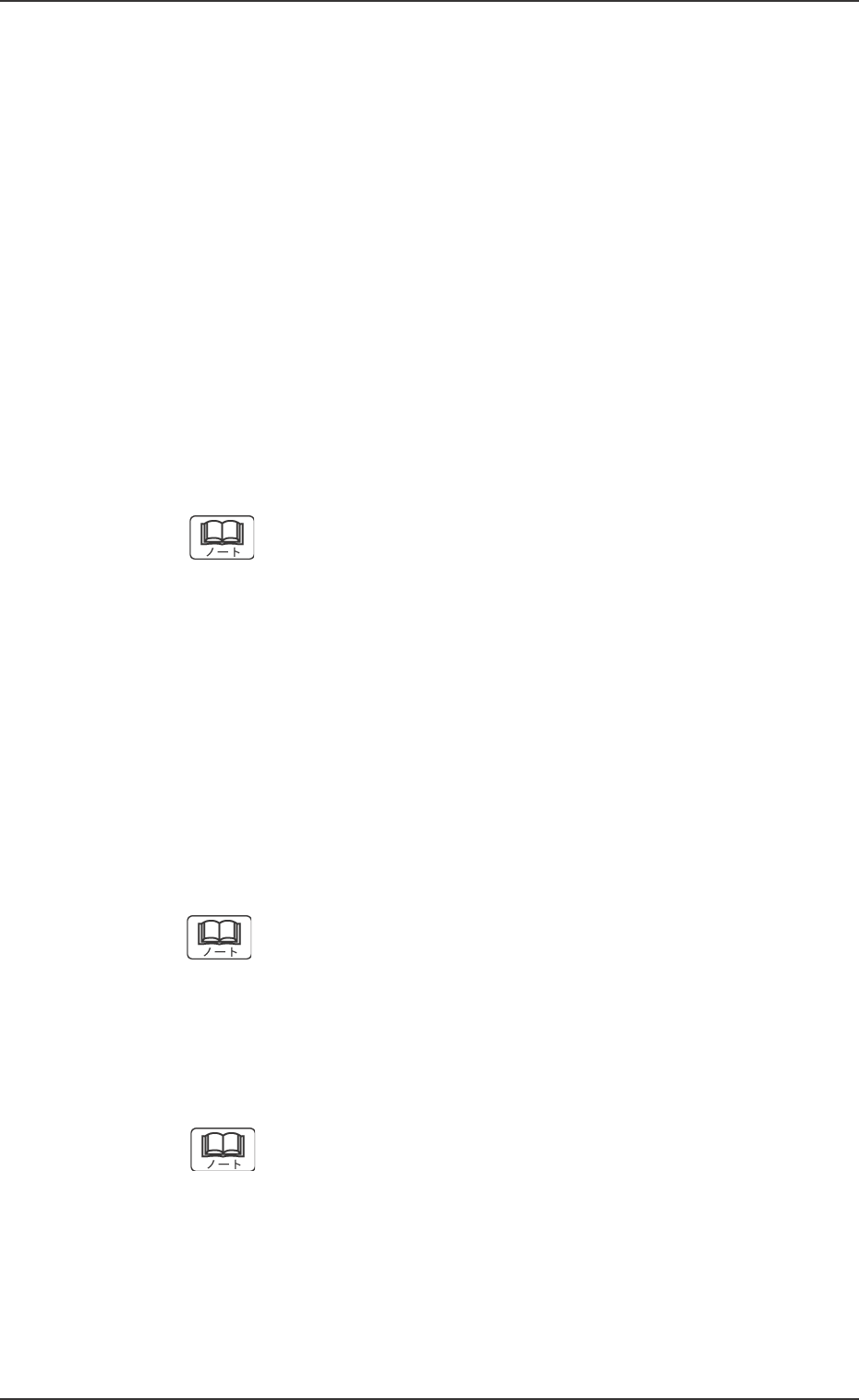
インターバル
後工程のワーク要求信号 ON を条件に、基板を排出します。
所定時間(排出コンベアタイマーで設定した時間)経過後、コン
ベアを停止します。
コンベア停止後、[排出インターバルタイマー]で設定時間の経
過後、排出条件が整えば排出動作を開始します。
異常の検出は行いません。
SMEMA (使用不可)
SMEMA 規格による搬送 I/F を行います。
*7*7
*7*7
*7
排出コンベア排出コンベア
排出コンベア排出コンベア
排出コンベア
タイマー 1[秒]、タイマー 2[秒]
停止タイマー(バッファ 1)[秒]、停止タイマー(バッファ 2)[秒]
タイマー 1[秒]
後工程との基板授受で排出コンベアの動作制限時間を設定しま
す。
(a) 設定は、後工程装置との基板授受搬送に要する時間
に 2 秒程度加算したデータを設定します。
(b) データの入力範囲は“0 ∼ 99 秒”です。
タイマー 2[秒]
排出コンベアの基板の装置内搬送における動作制限時間を設定
します。
データの入力範囲は“0 ∼ 99 秒”です。
停止タイマー(バッファ 1)[秒]
排出コンベアのバッファ 1 位置のセンサが基板を検出してか
ら、コンベアが停止するまでのディレー時間を設定します。
0301-005 5-53 AGH01JDTP
3.3 “運転パラメータ”タブ
停止タイマー(バッファ 2)[秒]
排出コンベアのバッファ 2 位置のセンサが基板を検出してか
ら、コンベアが停止するまでのディレー時間を設定します。
*8*8
*8*8
*8
排出インターバルタイマー排出インターバルタイマー
排出インターバルタイマー排出インターバルタイマー
排出インターバルタイマー
[[
[[
[
秒秒
秒秒
秒
]]
]]
]
後工程への排出方式が“インターバル”に設定されている場合
に排出インターバルを確保したい場合に設定してください。
データの入力範囲は“0 ∼ 99 秒”です。
*9*9
*9*9
*9
供給バッファ枚数供給バッファ枚数
供給バッファ枚数供給バッファ枚数
供給バッファ枚数
[[
[[
[
枚枚
枚枚
枚
]]
]]
]
供給コンベアの上に待機できる基板枚数を設定します。
供給バッファ枚数は 1 枚、2 枚のどちらかを選択しま
す。
*10*10
*10*10
*10
排出バッファ枚数排出バッファ枚数
排出バッファ枚数排出バッファ枚数
排出バッファ枚数
[[
[[
[
枚枚
枚枚
枚
]]
]]
]
排出コンベアの上に待機できる基板枚数を設定します。
排出バッファ枚数は 1 枚、2 枚のどちらかを選択しま
す。
Fig.3E43
0301-005 5-54 AGH01JDTP
3.3 “運転パラメータ”タブ
*11*11
*11*11
*11
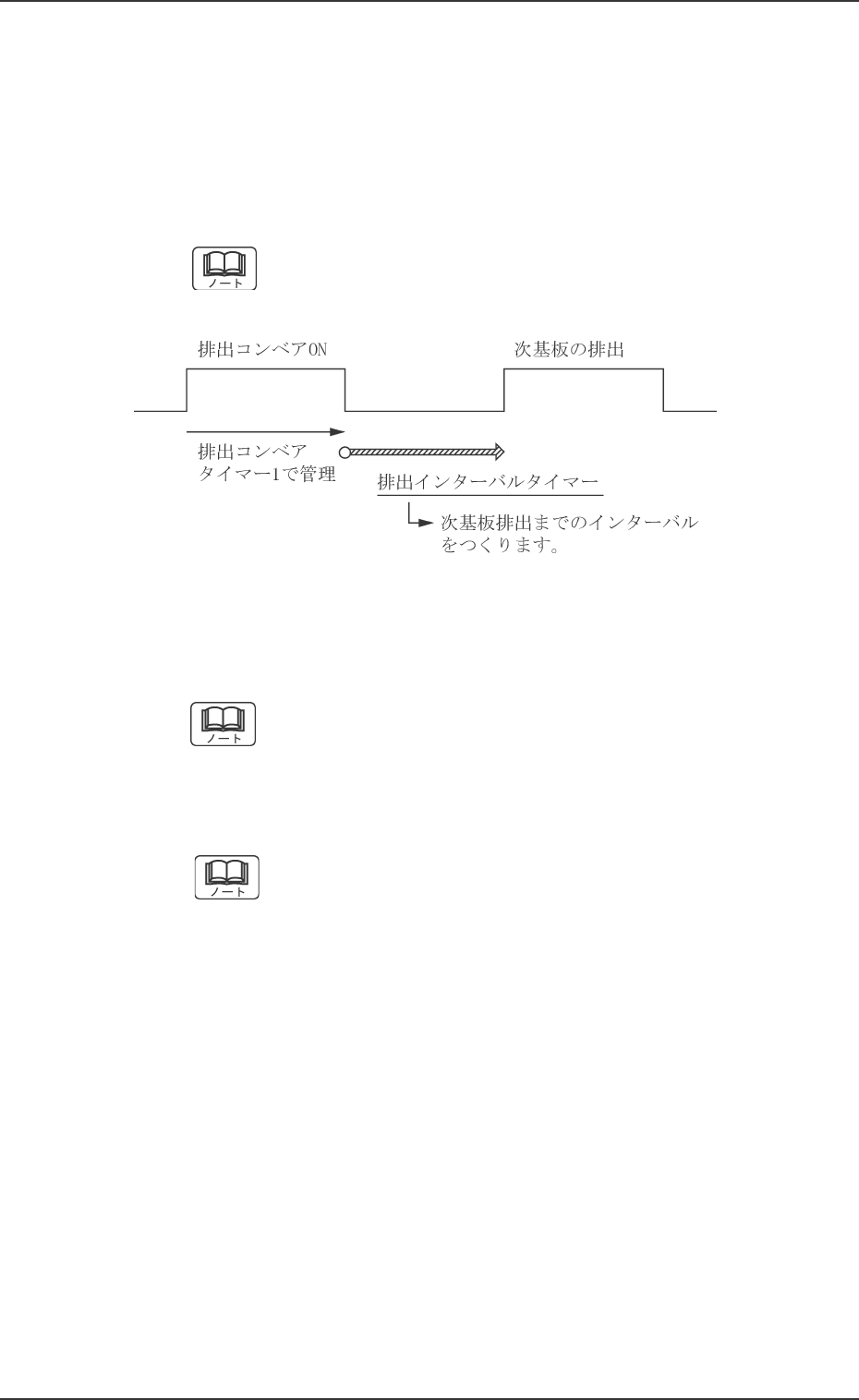
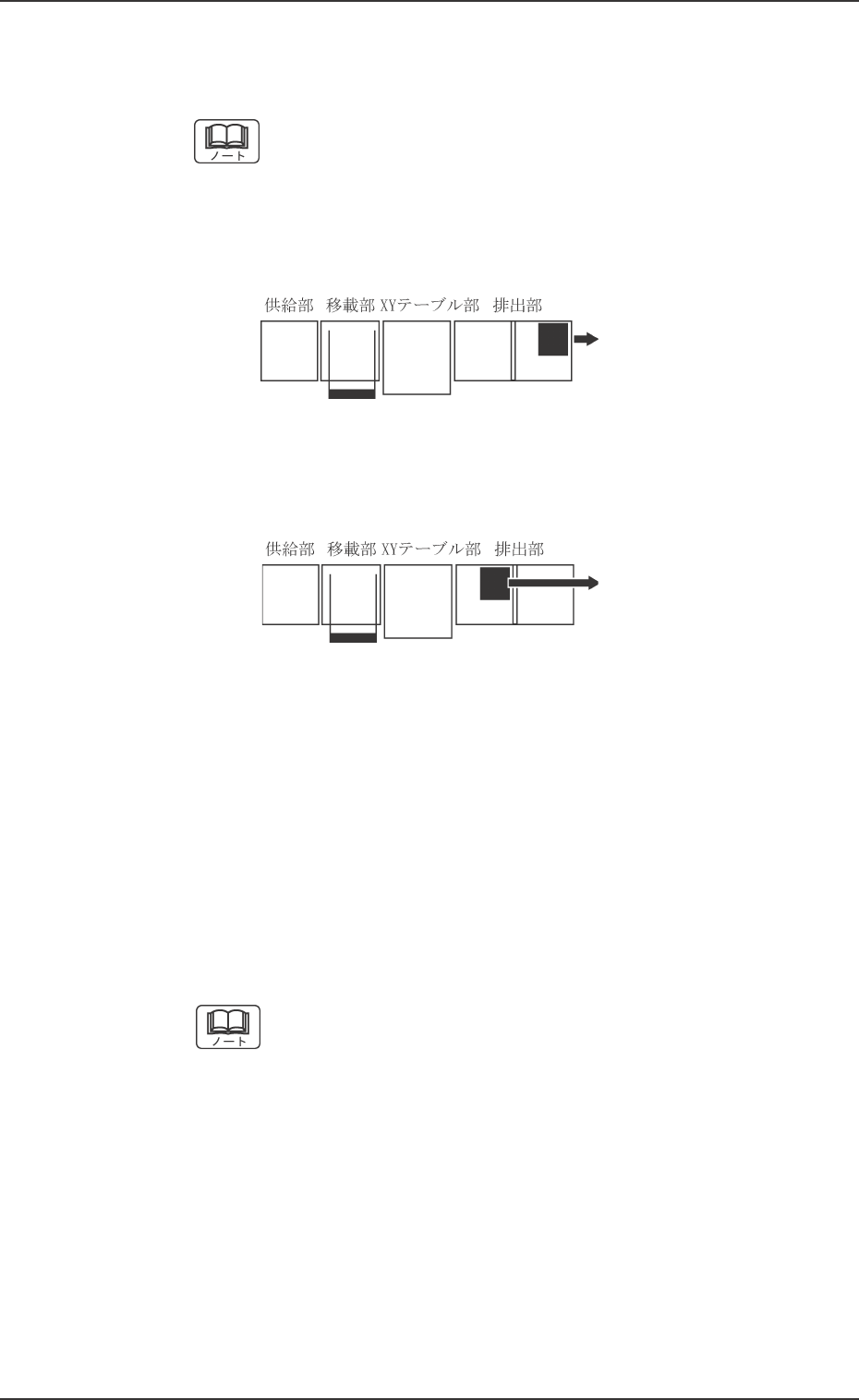
基板排出バッファ位置基板排出バッファ位置
基板排出バッファ位置基板排出バッファ位置
基板排出バッファ位置
基板搬送動作の基板バッファ位置を“出口”、“中間”に設定し
ます。
Fig.3E44、Fig.3E45 は、“基板流れ左から右”を説明
しています。
“基板流れ右から左”は、図とは逆の動作となります。
“出口”設定時の動作
“中間”設定時の動作
*12*12
*12*12
*12
XYXY
XYXY
XY
コンベア逆転ストロークコンベア逆転ストローク
コンベア逆転ストロークコンベア逆転ストローク
コンベア逆転ストローク
[mm][mm]
[mm][mm]
[mm]
基板移載時のシュートコンベア(XY コンベア)の逆転量を指
定します。
移載動作において、基板をシュート上に送り込んだ時点で移載
爪と基板が離れている場合があります。
基板の送り込み完了後、シュートコンベア(XY)を指定した値
分逆転させ移載爪に確実に当てることにより、基板の位置決め
が正常に完了します。
初期値(出荷値): 5.0 mm
*13*13
*13*13
*13
ZZ
ZZ
Z
クランプタイマークランプタイマー
クランプタイマークランプタイマー
クランプタイマー
[[
[[
[
秒秒
秒秒
秒
]]
]]
]
Z クランプタイマーの時間を設定します。
Fig.3E44
Fig.3E45
0301-005 5-55 AGH01JDTP
3.3 “運転パラメータ”タブ