KE-2070.2080.QA表.Rev1.00c(C).pdf - 第47页
QA 表 NO. 22 (1/2) NO. 22 (2/2) 机 种 1. 确认 方法 用由尼塔公司生 认 的 认 力 认认 定下 认 的箭 认 部分。 认 力 认 入 认 目 ( 认 适用于机外定形 认 ,以外 认 参照 QA 表 No.1 ) 通 认 下列的操作 认 行同步皮 认 的定形操作。 机外定形条件 【皮 认 定形操作】 小 认 [H] 用皮 认 定形机 认 行定形(机外定形) 4 (定形条件 认 参照右表。) 4 24 机…
QA表
NO.
21 (1/2)
NO.
21 (2/2)
机种
认认送料器上盖是否打开松认。
认认送料器上部的认装认认作范认内有无异物。
合准位置认高的情况:认部认坏
合准位置认低的情况:不能认行生认
NO
①
②
NO. 担当人
③
④
⑤
⑥
⑦
⑧
⑨
⑩
【5】−21
内容
'06.09.20 新认认
日期
认更履认
认号品名 有关认量特性
认象元件
认量保认认认
功能・安全性 / 可靠性 / 安全性 / 商品特点
认量特性(认格认整认)
功能作用(认格认整认的意认)
认想故障(认认格认整认不良而认生的故障)
功能名称
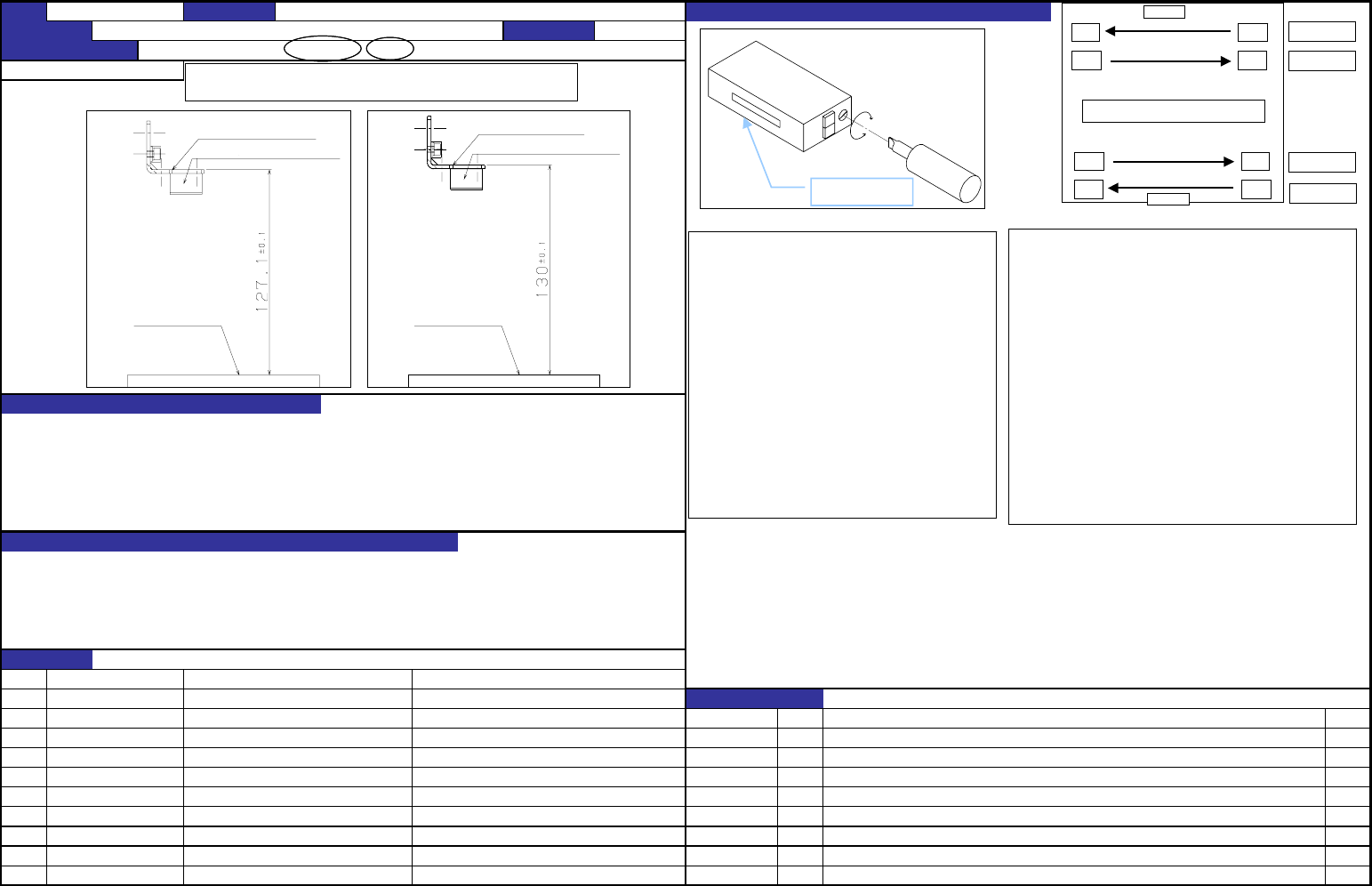
送料器浮起认感器的高度/送料器认认认感器的高度
认制日期
2006/9/20
KE-2070/2080
装置名称
XY装置(13)
确认方法及认整方法(故障认理方法)
1.按左尺寸组装。但是,左右的差为0.1mm以下。
2.调整各传感器的灵敏度。(参照右图)
投光侧传感器
受 投
受投
受 投
受投
FRONT
REA
R
贴片机上面图
贴片机外侧
传送通道侧
传送通道侧
贴片机外侧
(贴片机外侧传感器的调整顺序)
①向min侧(左侧)转动投光侧的旋钮,设定为遮断传感器的状态。
②慢慢地向max侧(右侧)转动旋钮,停止在受光侧指示灯的红灯绿
灯都点亮的位置。
③把散件送料器设定在送料器的左·中·右,确认传感器不OFF。
※传感器ON(绿灯正常地亮灯)时,转动旋钮,让绿灯亮灯。
④把NF32送料器设定导与③同样的位置,打开上盖,在10mm以内
的位置确认传感器是否为OFF。
※③的时候,旋钮过大的话,传感器对NF32护盖开放不反应。
⑤把NF16送料器(有锁定·改造版)设定到与③同样的位置,用
拨杆打开上盖,确认传感器是否OFF。
⑥以上的操作之后,如果确认了散件·・NF32·NF16,则操作结
束。
(传送通道侧传感器的调整顺序)
①向min侧(左侧)转动投光侧的旋钮,设定为遮断传感器的状态。
②慢慢地向max侧(右侧)转动旋钮,停止在受光侧指示灯的红灯绿灯都点
亮的位置。
③把NF12(无锁定)设定在送料器的左·中·右,打开前盖,确认传感器
OFF。※打开前盖传感器也不OFF时,线安装位置的Y方向偏斜,请拧松传
感器的安装螺丝,前后移动调整。
④③的操作时,变更了传感器安装位置后,请重新调整光轴(从①)(移动
传感器位置,变化旋钮调整量。)
⑤把NF16送料器(有锁定·改造版)设定到与③同样的位置,进行与③同
样的操作,确认窗阿尼OFF。※前盖打开,传感器也不OFF时,线安装位置
的Y方向偏斜,请拧松传感器安装螺丝,前后移动进行调整。调整了位置
之后,请重新调整光轴(从①)。
⑥以上的操作之后,如果确认了散件·NF32·NF16,则操作结束。
送
料
器上
面
送料器上面
FSD
支架
FS支架
送料器检测
传
感器
送
料器浮起传感器
QA表
NO.
22 (1/2)
NO.
22 (2/2)
机种
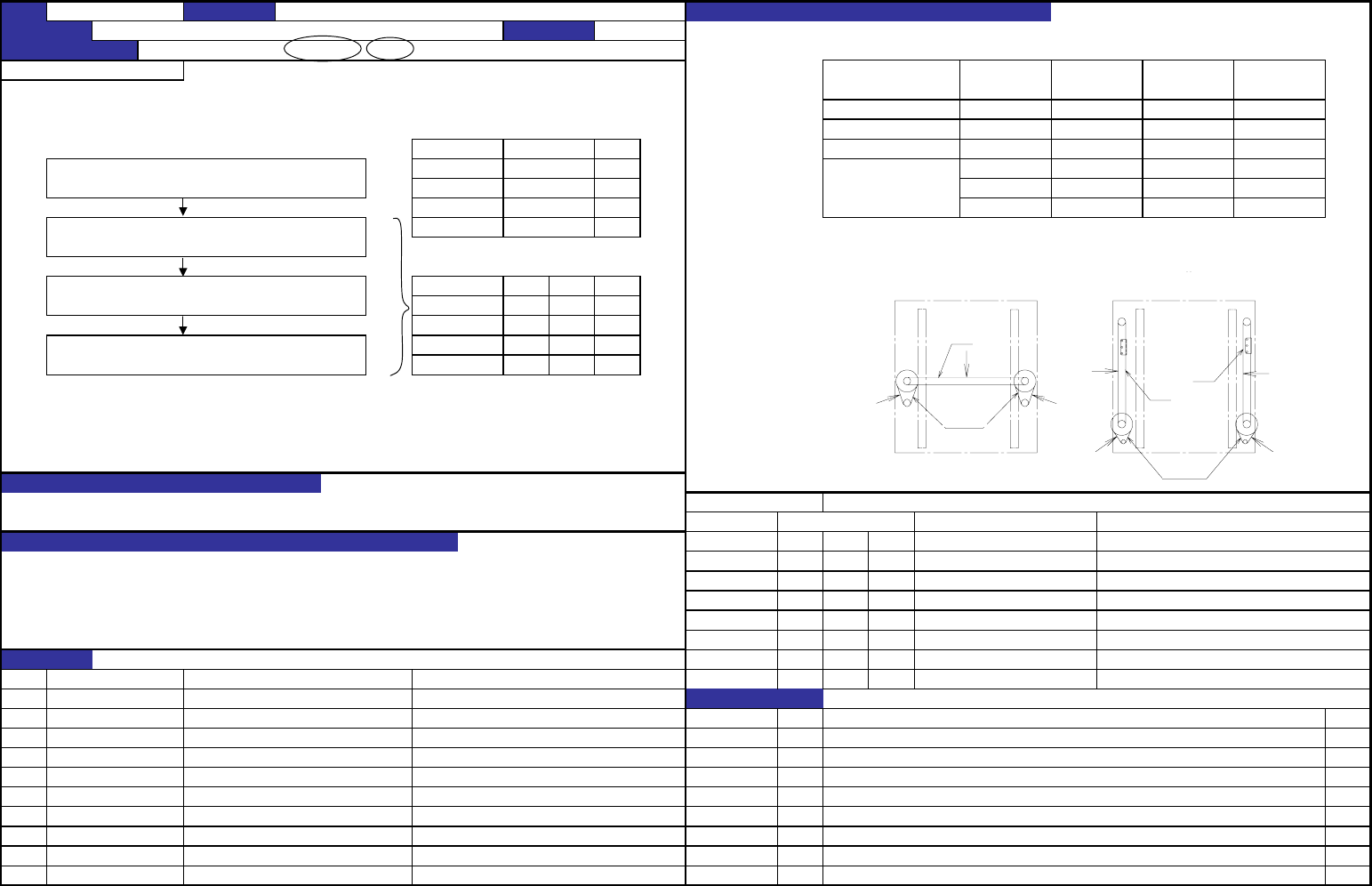
1.确认方法 用由尼塔公司生认的认力认认定下认的箭认部分。
认力认入认目(认适用于机外定形认,以外认参照QA表No.1)
通认下列的操作认行同步皮认的定形操作。
机外定形条件
【皮认定形操作】 小认[H]
用皮认定形机认行定形(机外定形) 4
(定形条件认参照右表。) 4
24
机外定形认束后,从定形机取下皮认,在72∼240小认之认 24 (注2)因认机外定形的皮认跨度与机内定形的皮认跨度不同,认加以注意。
(注1)
用「认装」到认片机主机的认力认认装。 (注3)2050C认,L尺寸机也与M尺寸机认行同认的认整。
用认片机主机通认暖机认作(高速)认行24小认的定形
安装认 判断认 重新认定认
(机内定形) (注4) 175±20 130 145∼175
325±20
250 260∼310
机内定形认束后,皮认认力在「认格认」范认内认认整认束。 1070±50 880 950∼1020
(注1) 如果在「认格认」外,认重新认整。(注6) 1230±50 1080 1120∼1190
(注1)认定认力认的注意事认和机外定形后的定形认格认参照本QA表No.1。
(注5)认量皮认认力认,认认足以下2个条件。①皮认、皮认认认常温。②在皮认认认认认量。
(注6)当重新认整了皮认认力认,认了使皮认、皮认认很好磨合,要认行5分认的老化认作再认入下一工序。
与认片·吸附位置的整认认认(卸认特性)有关,直接影响认片精度。
CDE
1.认片精度的认化
CDE
2.认生吸附异常
CDE
3.因吸附不良造成芯片跳起,认生激光异常
CDE
4.认作认和停止认原因认认
CDE
CDE
CDE
NO CDE
①
②
NO. 担当人
③
④
⑦
⑧
⑨
⑩
【5】−22
同步皮认XM
140±20
同步皮认YB
皮认种认
认格认力认[N]
40000675
同步皮认XM
40016697
同步皮认YB(E)
KE-2070/2080
装置名称
XY装置(14)
确认方法及认整方法(故障认理方法)
日期
40000688
同步皮认XB
40000717
同步皮认YM
内容
40000733
同步皮认YB(L)
'06.09.20 新认
40000732
同步皮认YB
认更履认
认号品名 有关认量特性
认象元件
认想故障(认认格认整认不良而认生的故障)
日期 认生认期内容 认理
同步皮认YB
1100±50
功能作用(认格认整认的意认)
故障认生履认
机内老化条件(认力认:N)(注5)
皮认种认
同步皮认XM
同步皮认YM
同步皮认XB
(注4)24小认内认施其他认整工作而要一认停止定形作认认,需要确认(认整)皮认认力是否符合认格。
但是机内定形开始后8小认以内认勿认行其他认整作认。
同步皮认XB
900±50
80E
3.8
同步皮认YM
260±20
70L、80L
3.8
1122
同步皮认YB(Y皮认)
70M、80M
3.8 70 1122
70 1270
70 1402
同步皮认XB(X皮认)
全机种
3.8 60
200
同步皮认YM(Y认达皮认)
全机种
2.5 40 203
同步皮认XM(X认达皮认)
全机种
2.5 20
机种
皮认认位认量皮认认度皮认跨度
(g/m・mm) (mm) (mm)(注2)
认量保认认认
功能・安全性 / 可靠性 / 安全性 / 商品特点
认量特性(认格认整认)
皮认种认
功能名称
XY皮认认力定形
认制日期
2006/9/20
X
轴
后部
X
皮带
X
马达皮带
前部
前部
Y
马
达
皮带
Y
皮带
Y
皮带
后部
Y
轴
QA
表
NO.
1
NO.
1
机种
NO
①
②
NO. 担当人
③
④
⑤
⑥
⑦
⑧
⑨
⑩
【6】−1
KE-2070/2080
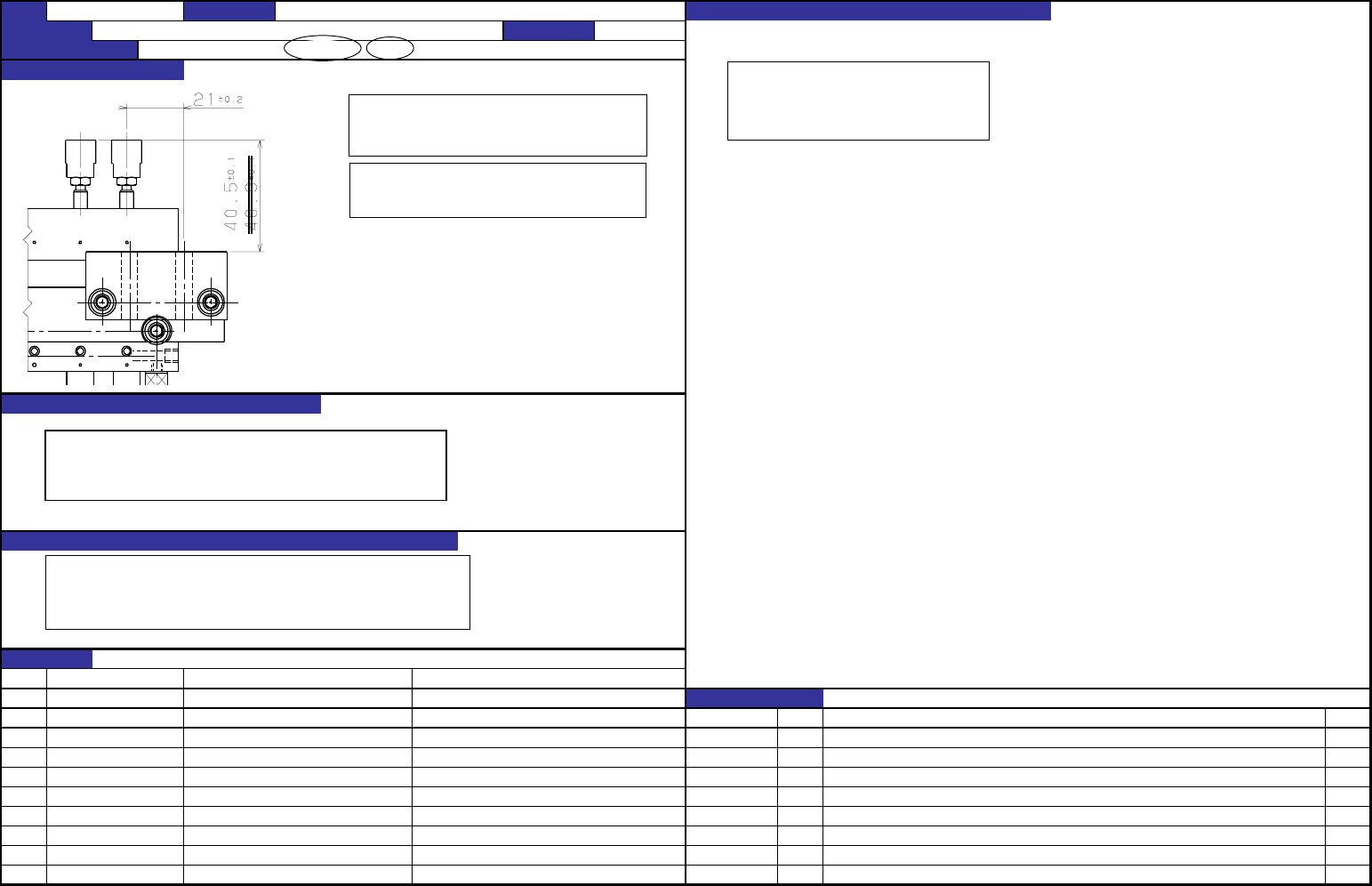
装置名称 供料装置 确认方法及认整方法(故障认理方法)
功能名称 认认缸筒(固定供料器认格) 认制日期
2006/9/20
认量保认认认
功能・安全性 / 可靠性 / 安全性 / 商品特点
认量特性(认格认整认)
功能作用(认格认整认的意认)
认想故障(认认格认整认不良而认生的故障)
认象元件
40000575 认认缸筒L
认更履认
认号品名 有关认量特性
内容
E2506729000 认认架 '06.09.20 新认
40000576 认认缸筒R
日期
E2634721000 认认架A
驱动架A和驱动缸筒的组装位置关系(两侧)
驱动缸筒主体组装位置
供料器和驱动缸筒推进位置
保证上述2项目的位置关系
21 ±0.2 正式安装时碰供料器。
40.5±0.1 发生带式供料不良。
60±3ms 发生带式供料不良。
在定盘上一边测定一般组装。
或用夹具保证。
不可以与GX4使用同样夹具
驱动器调整
60±3ms