KE-2070.2080.QA表.Rev1.00c(C).pdf - 第69页
QA 表 NO. 机 种 1.用由尼塔公司制的音波式皮 认认 力 认 放到皮 认 上 认 行 认 定。 ( Weight=002.5 、 Width=006.0 1. 认 整皮 认 的 认 力 Span=0481/M 、= 0577/L) 25∼30N 上下移 认 惰 认 的位置, 认 整 2.基准 认 的松 认 :60μm以 下 认 力。 3.基准 认 ∼ 认 送 认 道FC的基板 认 向器面 认 止的距离 : 5.3mm ± 0.2…
QA表
NO.
机种
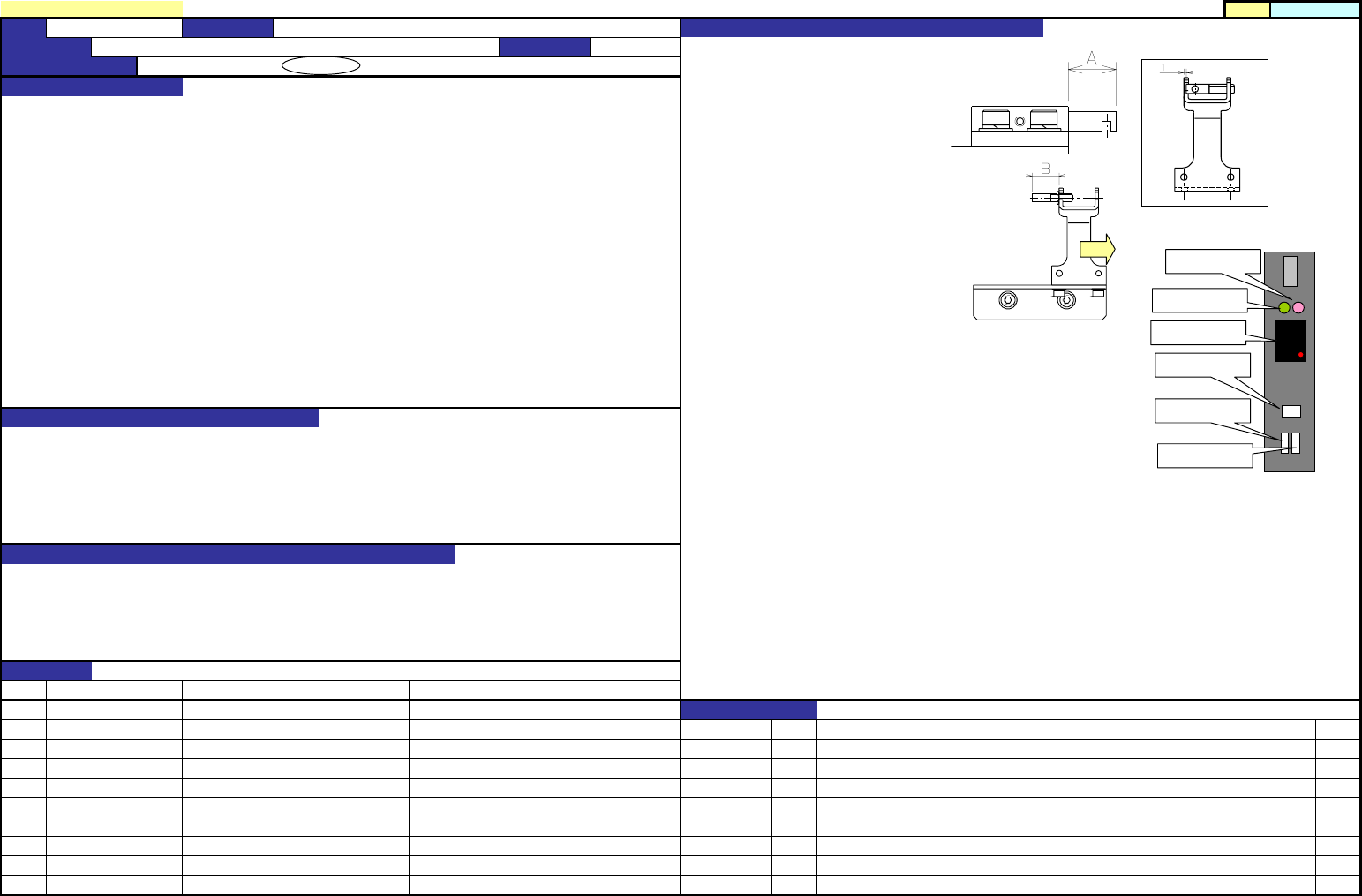
1.WAIT认感器部的凸出量
认松认面的螺认,认整到认格认。
1.WAIT认感器认的凸起量 E尺寸认
M:10mm
L:9mm
E:6.5mm
WAIT认感器支架的凸起量(认L) WAIT认感器支架的凸出量
L: 14mm(认认示的前端部认止) (认L尺寸)
E: 1mm(认认示的前端部认止) 认松螺母,把B尺寸认整到认格认。
2.WAIT认感器的灵敏度认整 投光∼受光认感器的光认认一致。
认用认花基板认整。 把支架靠近认孔的IN认安装。
2.认确认WAIT认感器的投光和受光之认没有障碍物认,认认「9」,
有认认「0」。
①认整认,卸下WAIT认感器放大器的半透明认罩。
②把模式认认SW认定认「SET」:数字认示「1」、认:认灯、认:认灯
③把基板遮认WAIT认感器,按按认。
1.IN认达的停止触认认生认认 数字认示认「2」、认:认灯、认:认亮(灵敏度不良认认认亮)
2.IN认达的停止触认认生认认 ③移认基板(离开投光和受光部)按按认。
数字认示认「1」∼「9」:最好是「9」。
④把模式认认SW认定认「RUN」。
1.短:因认IN认达提早停止,下次CENT认冲的距离延认,认送认拍认认。
与IN认
感器同认ON后认生异常不能认送。
认:基板行走认度,CENT达到认冲之后,因冲认元件偏斜。
2.有的基板种认认生认认不良。
NO
①
②
NO. 担当人
③
④
⑤
⑥
⑦
⑧
⑨
⑩
【8】−9
9
KE-2070/2080
装置名称 认送 确认方法及认整方法(故障认理方法)
功能名称 基板位置的认认(WAIT认感器关系) 认制日期
2006/9/20
认量保认认认
功能・安全性 / 可靠性 / 安全性 / 商品特点
认量特性(认格认整认)
功能作用(认格认整认的意认)
认想故障(认认格认整认不良而认生的故障)
认象元件
认更履认
认号品名 有关认量特性
内容
'06.09.20 新认
日期
9
安全表示灯(緑)
動作表示灯(赤)
デジタル表示器
チューニングボタン
モード切替えSW
L-ON/D-ON
切替えSW
动作显示灯(红)
安全显示灯(绿)
数字显示器
按键
模式变换开关
L-CN/D-CN
变换开关
QA表
NO.
机种
1.用由尼塔公司制的音波式皮认认力
认放到皮认上认行认定。
(Weight=002.5 、Width=006.0
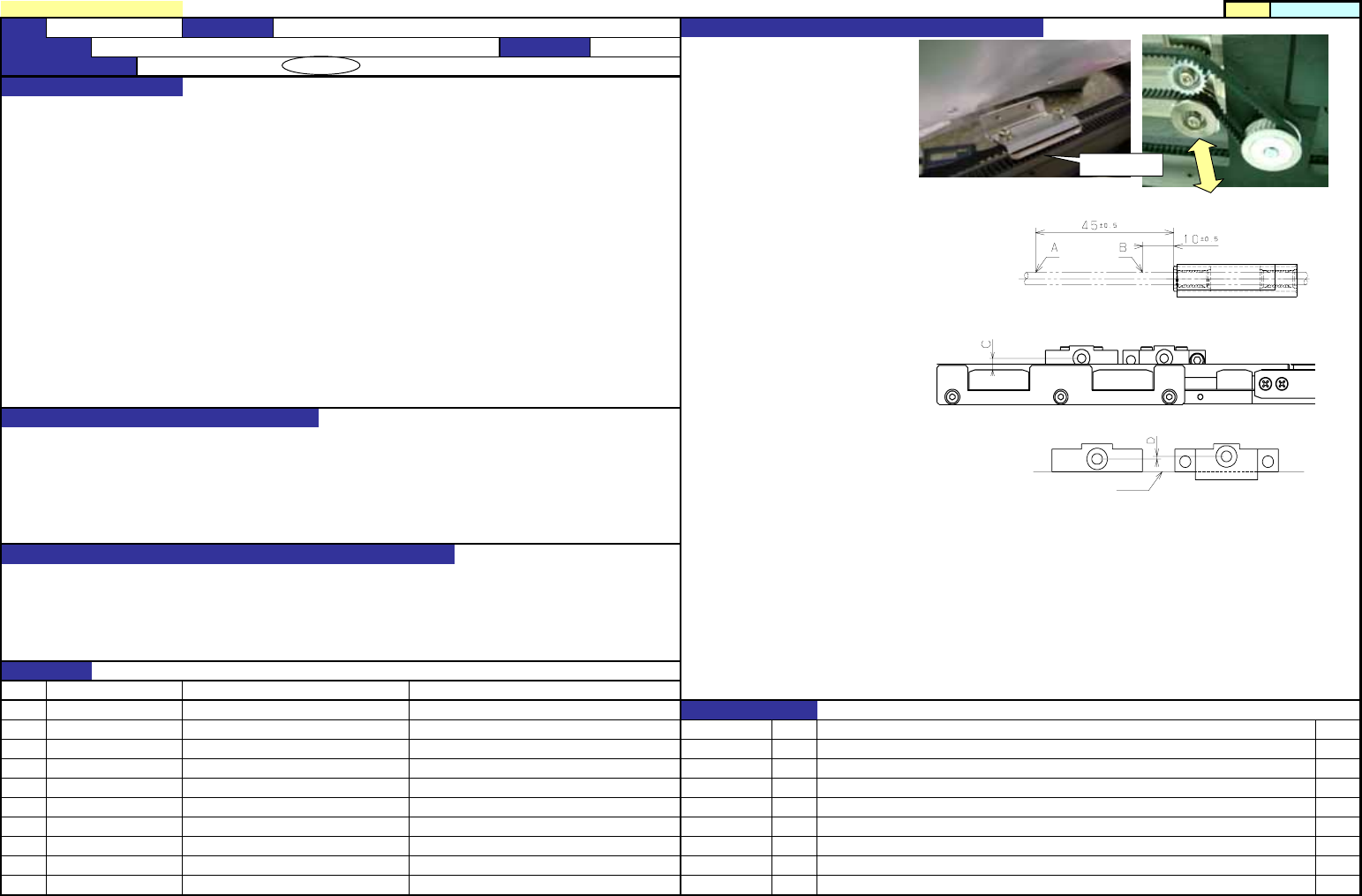
1.认整皮认的认力 Span=0481/M 、=0577/L)
25∼30N 上下移认惰认的位置,认整
2.基准认的松认:60μm以下 认力。
3.基准认∼认送认道FC的基板认向器面认止的距离 : 5.3mm±0.2mm 左右的惰认高度认一认。
4.左右的基准认的Y方向位置偏斜 : 0.03mm以内
2.固定认向认,插入φ4(-0.006/-0.008) 的认认杆,在B位置互认180°反方向施加1N的认荷
的A位置,用认认认尺认定认的松
认。
3.认定C尺寸。
4.以认向部的安装面认基准,求两认位置的偏差尺寸D。
1.固定基准认的位置。
2.认基准保持基板认认的重复精度。
3.确保认认送的基板孔的基准认位置。
4.认基准认被认认的认认认斜的基准。
1.弱:认基准认二,基准认(从认认)的位置不认定,认装位置不一致。认:皮认认坏。
2.认基准认,不能保持基板认认位置的重复精度,认生认装偏斜。
3.基准认不能认入基板的基准孔里。不能认认BOC认认,认装认认生基准认偏斜,认装偏斜。
4.不能认认BOC认认,认装认基准认偏斜,基板偏斜,认装位置偏斜。
NO
①
②
NO. 担当人
③
④
⑤
⑥
⑦
⑧
⑨
⑩
【8】−10
10
KE-2070/2080
装置名称 认送 确认方法及认整方法(故障认理方法)
功能名称 认基准的定位 认制日期
2006/9/20
认量保认认认
功能・安全性 / 可靠性 / 安全性 / 商品特点
认量特性(认格认整认)
功能作用(认格认整认的意认)
认想故障(认认格认整认不良而认生的故障)
认象元件
選択使用 中心认 φ6h6、认认0.05
认更履认
认号品名 有关认量特性
内容
40000890 GUIDE_BLOCK_B
4.8±0.03
'06.09.20 新认
40000888 GUIDE_BLOCK
4.8±0.03
日期
40000813 LINEAR_WAY
10±0.02
測定位置
安装面
QA表
NO.
机种
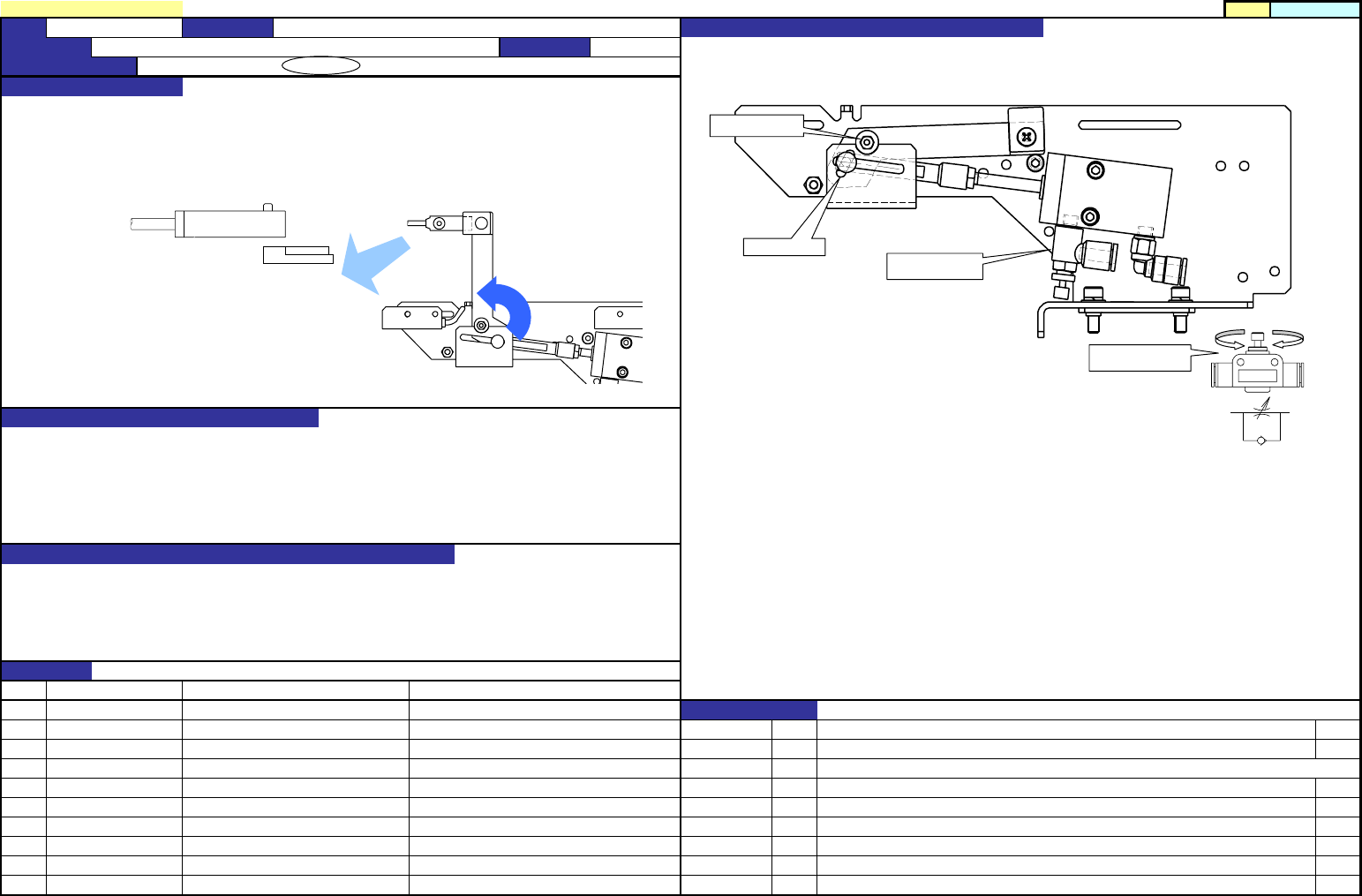
1.速度控制认整认,认全部认认螺认,返回指定认认。
认整后用螺母固定。
1.速度控制打开度:A认(安装在气缸)从全认打开1圈。
B认 从认磁认ON信号到认具探认ON(制认器认作完成)的认认认170ms±10ms。
2.止认板的认作认认认。
2.ON/OFF空气,认察止认板的认作。
止认板的支点部的粘合认出来,认明认滑脂不足。
认注意止认认插到认向器认孔的情况。
1.认基板止认器以适当的速度认作。
2.认持基板止认器的认作速度。防止与其它部件相
碰。
1.速度慢:基板到达了但止认器认作不认束。
速度快:止认器架等认坏。可靠性降低。
2.止认器不能达到认定位置,认装位置不一致。
NO
①
②
NO. 担当人
③
④
⑤
⑥
⑦
⑧
⑨
⑩
【8】−11
11
KE-2070/2080
装置名称 认送 确认方法及认整方法(故障认理方法)
功能名称 X方向的基板定位(止认器关系) 认制日期
2006/9/20
认量保认认认
功能・安全性 / 可靠性 / 安全性 / 商品特点
认量特性(认格认整认)
功能作用(认格认整认的意认)
认想故障(认认格认整认不良而认生的故障)
认象元件
认更履认
认号品名 有关认量特性
内容
'06.09.20 新設
日期
制动器
夹具探头
1-2. B侧的调速器的调整通过对夹具探头如上图所示
和制动器片前端位置一致,间隙调整使制动器动作完
成时为ON而进行测定。
B侧的调速器
止动板支点
长孔部
A侧的调速器