IS620P系列伺服用户手册.pdf - 第101页
4 IS620P 系列伺服用户手册简易版 第 4 章 运行模式与调试方法 - 101 - 4.6 运行前检查 请首先脱离伺服电机连接的负载、与伺服电机轴连接的连轴器及其相关配件。保证无负载情况下 伺服电机可以正常工作后,再连接负载,以避免不必要的危险。 运行前请检查并确保: 1. 伺服驱动器外观上无明显的毁损; 2. 配线端子已进行绝缘处理; 3. 驱动器内部没有螺丝或金属片等导电性物体、可燃性物体,接线端口处没有导电异物; 4. 伺服…
4
第
4
章
运行模式与调试方法
IS620P
系列伺服用户手册简易版
- 100 -
4.5 软限位功能
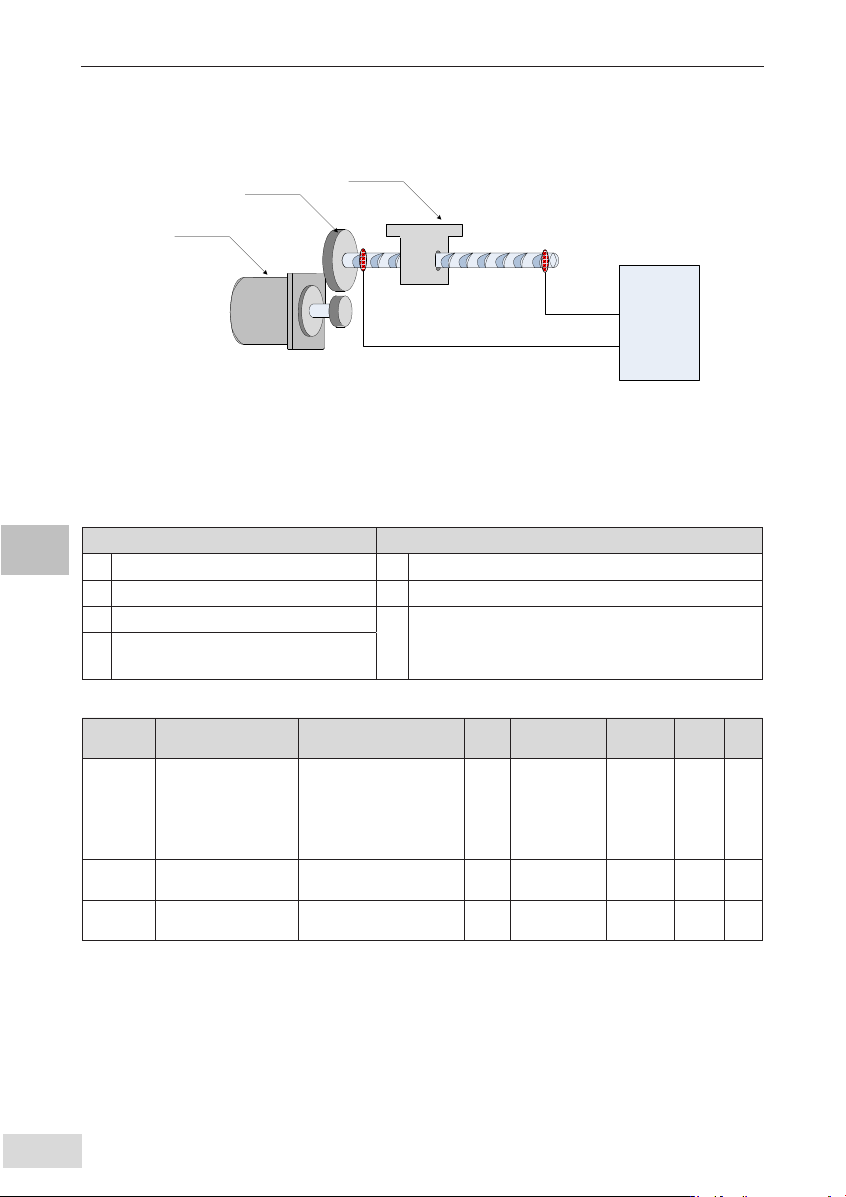
传统硬件限位功能:传统方式中极限位只能通过外部信号给定,将外部传感器信号接入伺服驱动
器 CN1 接口。
FunIN.14:
P-OT
FunIN.15:
N-OT
电机
减速轮
负载
伺服驱动器
DI
DI
图 4-19 限位开关的安装示意图
软限位功能:指通过驱动器内部位置反馈与设置的限位值进行比较,当超出限位值后立即报警、
执行停机操作。该功能在绝对位置模式和增量位置模式下均可使用,增量位置模式需要设置 H0A-
40=2,驱动器上电后先进行原点复归查找机器原点,再启用软限位功能。
传统硬件限位与软限位功能优劣势比较:
传统硬件限位功能 软限位功能
1 只能限定为线性运动、单圈旋转运动 1 不仅可在线性运动中使用,在旋转模式下同样适用
2 需要外部具备安装机械限位开关 2 无需硬件接线,防止线路接触不良导致误动作
3 无法判断机械打滑异常
3 内部位置比较,防止机械打滑导致动作异常
4
当断电后,机械移出限位,无法判断、
无法报警
软限位相关功能码:
功能码 名称 设定范围 单位 出厂设定 生效时间 类别
相关
模式
H0A-40 软限位设置
0- 不使能软限位
1- 上电后立即使能软限
位
2- 原点回零后使能软限
位
1 0 立即生效
停机
设定
PST
H0A-41 软限位最大值
-2147483648~
2147483647
指令
单位
2147483647 立即生效
停机
设定
PST
H0A-43 软限位最小值
-2147483648~
2147483647
指令
单位
-2147483648 立即生效
停机
设定
PST
● H0A-40=0 时,不使能软限位功能;
● H0A-40=1 时,驱动器上电后立即使能软限位功能。当绝对位置计数器(H0B-07) 大于 H0A-
41 发生 Er.950 警告,执行正向超程停机;当绝对位置计数器(H0B-07) 小于 H0A-43 发生
Er.952 警告,执行负向超程停机;
● H0A-40=2 时,驱动器上电后原点复归前不使能软限位,原点复归后当绝对位置计数器(H0B-07)
大于 H0A-41,发 生 Er.950 警告,执行正向超程停机;原点复归后当绝对位置计数器(H0B-07)
小于 H0A-43,发生 Er.952 警告,执行正向超程停机。

4
IS620P
系列伺服用户手册简易版 第
4
章 运行模式与调试方法
- 101 -
4.6 运行前检查
请首先脱离伺服电机连接的负载、与伺服电机轴连接的连轴器及其相关配件。保证无负载情况下
伺服电机可以正常工作后,再连接负载,以避免不必要的危险。
运行前请检查并确保:
1. 伺服驱动器外观上无明显的毁损;
2. 配线端子已进行绝缘处理;
3. 驱动器内部没有螺丝或金属片等导电性物体、可燃性物体,接线端口处没有导电异物;
4. 伺服驱动器或外部的制动电阻器未放置于可燃物体上;
5. 配线完成及正确:
● 驱动器电源、辅助电源、接地端等接线正确;各控制信号线缆接线正确、可靠;各限位开关、
保护信号均已正确连接。
6. 使能开关已置于 OFF 状态;
7. 切断电源回路及急停报警回路保持通路;
8. 伺服驱动器外加电压基准正确。
在控制器没有发送运行命令信号的情况下,给伺服驱动器上电。检查并保证:
● 伺服电机可以正常转动,无振动或运行声音过大现象;
● 各项参数设置正确。根据机械特性的不同可能出现不预期动作,请勿设置过度极端的参数;
● 母线电压指示灯与数码管显示器无异常。
4
第
4
章
运行模式与调试方法
IS620P
系列伺服用户手册简易版
- 102 -
4.7 负载惯量辨识与增益调整
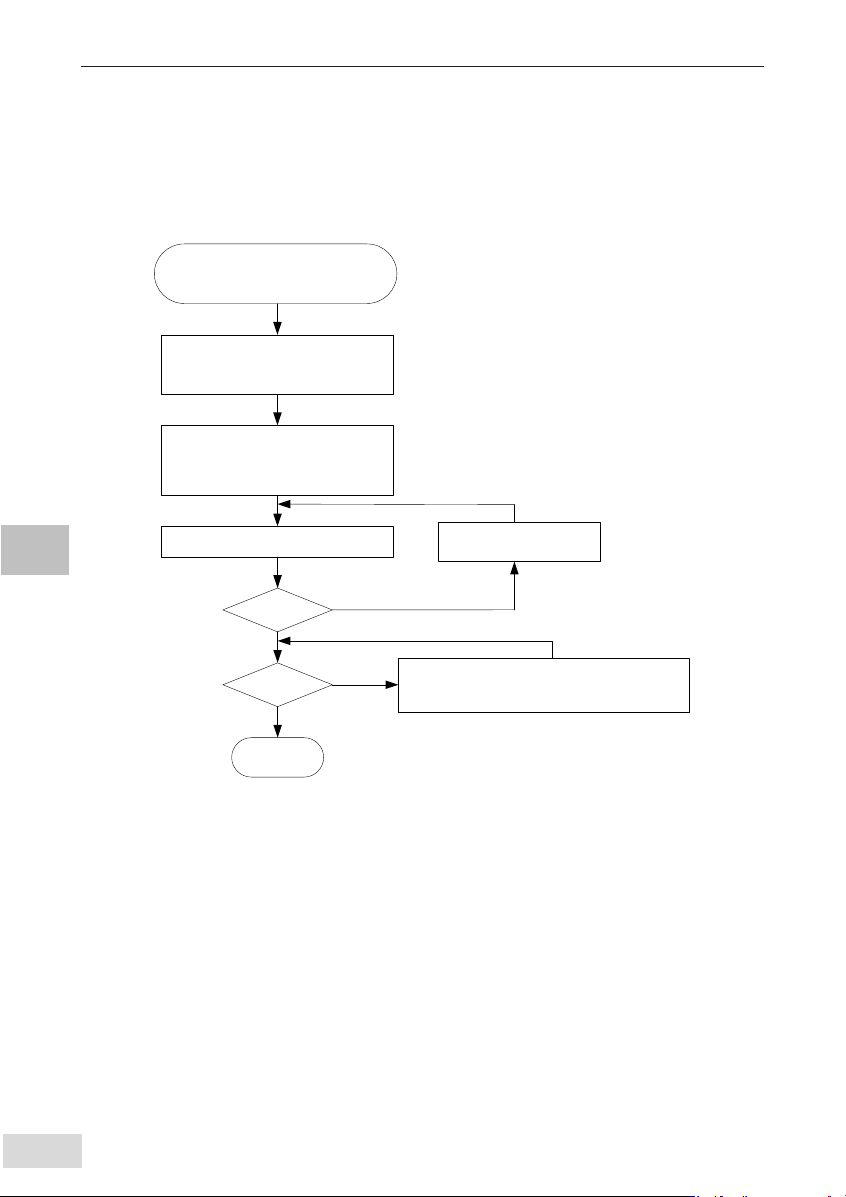
首先请正确安装及接线,完成相关功能性参数设置后,参考图 4-20 使用流程,调试惯量辨识、刚
性表及振动抑制等性能。
惯量辨识 ( 详见 4.7.1),得到正确负载惯量比后,建议先进行自动增益调整 ( 详见 4.7.2),若效果
不佳,再进行手动增益调整 ( 详见 4.6.3)。通过陷波器抑制机械共振,可设置两个共振频率 ( 详见
4.7.4)。一般调试流程如下面的流程图所示。
性能是否满足
调整结束
是否有振动?
正确安装及接线,设置H00-00电机型号,
H02-00控制方式,H03/H04组DI/DO参
数,H05组电子齿轮比,指令输入方式等
进行惯量辨识
(涉及功能码:H0D-02,H08-15,
H09-05,H09-06,H09-07,H09-08)
设置为自调整模式
,
用刚性表进行调整
(H09-00=1)
注:此模式下H08-00,H08-01,H08-02,
H07-05手动设置无效
机构反复动作,通过H09-01调整刚性等级
改为手动微调 H09-00=0
(涉及功能码:H08-00,H08-01,H08-02,H07-05,
H08-18,H08-19,H08-20,H08-21,H08-22等)
否
否
是
是
降低刚性等级或使用陷波器
(H09-12或者H09-15)
图 4-20 一般调试流程图