IS620P系列伺服用户手册.pdf - 第104页
4 第 4 章 运行模式与调试方法 IS620P 系列伺服用户手册简易版 - 104 - ☆ 相关功能码如下: 功能码 名称 设定范围 单位 出厂 设定 生效方式 设定方式 相关 模式 H09-05 离线惯量辨识模式选择 0 :正反三角波模式 1 : JOG 点动模式 - 0 立即生效 停机设定 PST H09-06 惯量辨识最大速度 100~1000 rpm 500 立即生效 停机设定 PST H09-07 惯量辨识时加速至最大速度时…
4
IS620P
系列伺服用户手册简易版 第
4
章 运行模式与调试方法
- 103 -
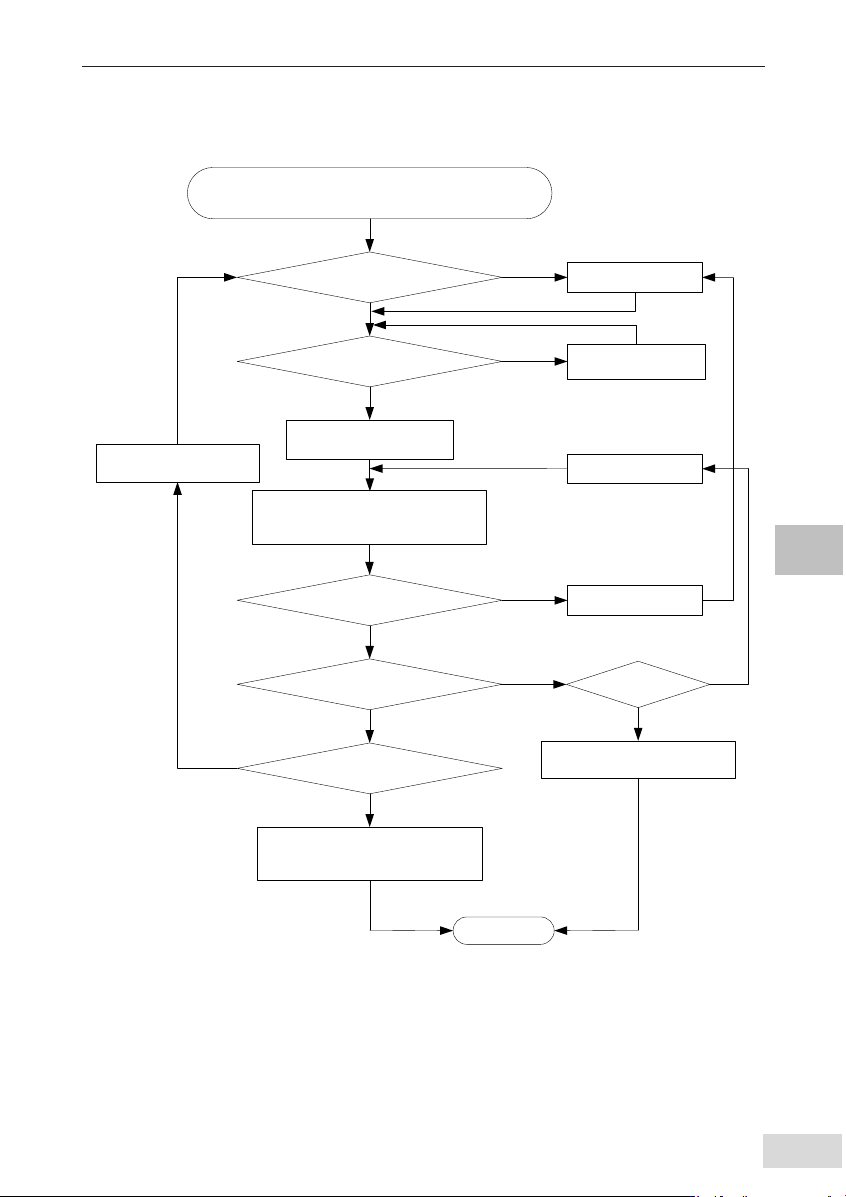
4.7.1 惯量辨识
自动增益调整或手动增益调整前需进行惯量辨识,以得到真实的负载惯量比。惯量辨识的流程图
如下:
配线及基本设置后,进入rdy状态。
注意:机械上请安装限位开关,并保证电机有正反各1圈以上的
可运动行程,防止惯量辨识过程中运行超程造成事故。
预估惯量比是否小于 10倍
电机实际可运行行程
是否满足H09-09数值
是
是
持续按向上键,电机正转后反转,往复
运动,松开按键则自由停机。按向下键
类同。同时面板实时显示辨识的惯量比
显示惯量比是否变化
是
反复多次后显示惯
量比是否趋于固定
是
现场是否允许
增大惯量辨识最大速 (H09-06)
否
进入H0D-02,此时面板显示
设置的H08-15惯量比
减小惯量辨识最大速度
(H09-06)
否
否
是否支持
长行程运行
否
否
持续按SET键,至面板显示“SAVE”,
辨识出的惯量比将会写入到 H08-15中,
退出
可能不满足惯量辨识条件,直接
手动设置惯量或者联系本公司
否
是
适当增大H09-06,此值越大,
辨识结果越接近真实值。
是
辨识结束
(H08-15)
预置惯量比
H09-05=1
设置
增大惯量比
H08-15
H0D-02
图 4-21 惯量辨识调试流程图
注:
■ 若在 H0815=1 默认值情况下,由于惯量比过小导致实际速度跟不上指令,使得辨识失败,此时
需预置“惯量辨识最后输出平均值”(H0815)。预置值建议以 5 倍为起始值,逐步递增至可正
常辨识为止。
■ 离线惯量辨识模式,一般建议用三角波模式,如果碰到有辨识效果不好的场合用阶跃矩形波模
式尝试。
■ 在 H0905=1 的情况下注意机械行程,防止离线惯量辨识过程中超程造成事故。
4
第
4
章
运行模式与调试方法
IS620P
系列伺服用户手册简易版
- 104 -
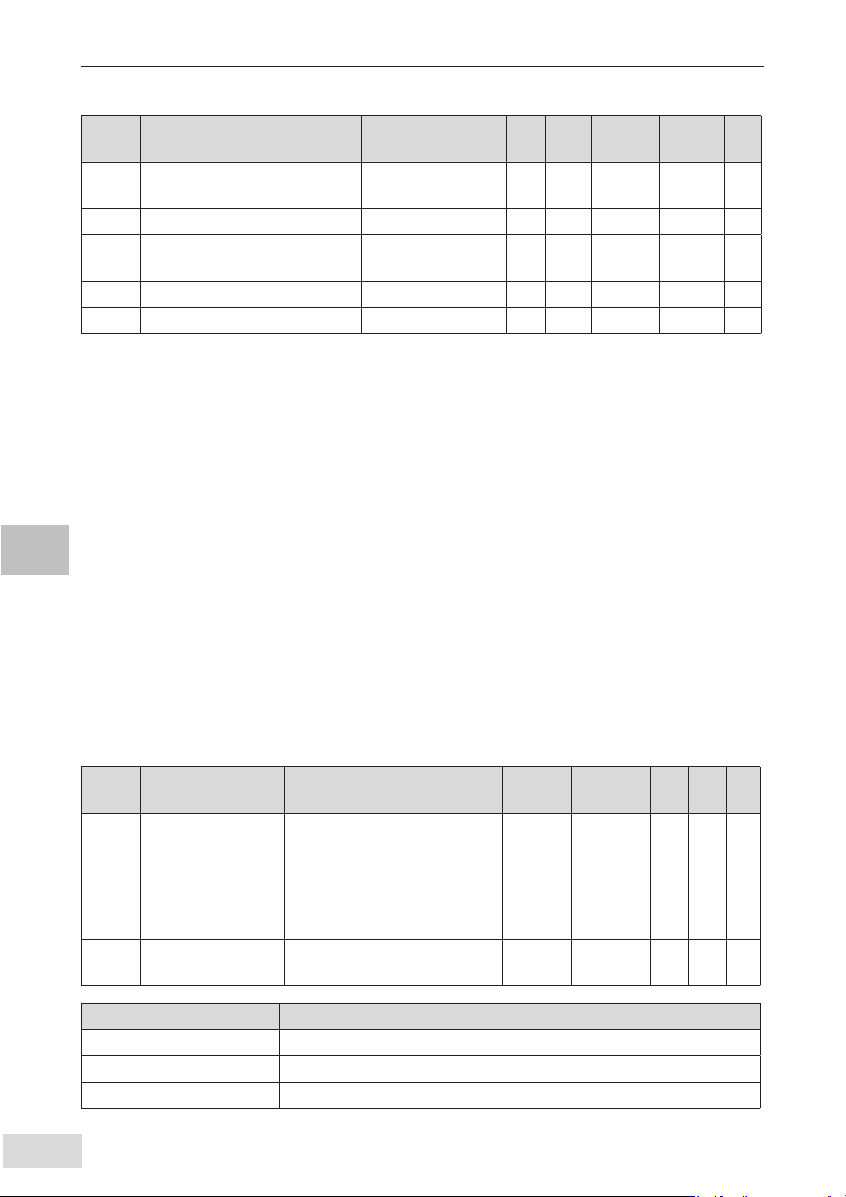
☆相关功能码如下:
功能码 名称 设定范围 单位
出厂
设定
生效方式 设定方式
相关
模式
H09-05 离线惯量辨识模式选择
0:正反三角波模式
1:JOG 点动模式
- 0 立即生效 停机设定 PST
H09-06 惯量辨识最大速度 100~1000 rpm 500 立即生效 停机设定 PST
H09-07
惯量辨识时加速至最大速度时间
常数
20~800 ms 125 立即生效 停机设定 PST
H09-08 单次惯量辨识完成后等待时间 50~10000 ms 800 立即生效 停机设定 PST
H09-09 完成单次惯量辨识电机转动圈数 0.00~2.00 r - - 显示 PST
惯量辨识有效的条件:
● 实际电机最高转速高于 150rpm;
● 实际加减速时的加速度在 3000rpm/s 以上;
● 负载转矩比较稳定,不能剧烈变化;
● 最大可辨识 120 倍惯量;
● 机械刚性极低或传动机构背隙较大时可能会辨识失效。
4.7.2 自动增益调整
自动增益调整的一般方法是,先将 H09-00 设为 1,再施加指令使伺服电机运动起来,此时一边
观察效果一边调整 H09-01 刚性等级的值,直到达到满意效果。如果始终不能满意则转为手动增
益调整模式。
注:
■ 刚性表有效时,H0800、H0801、H0802 和 H0705 这 4 个参数将会根据 H0901 刚性等级的设
置而自动设置,手动设置无效。
■ 刚性调高后可能产生振动,推荐使用陷波器抑制,详见 4.7.4。
■ 为避免因刚性等级突然增高产生振动,请逐渐增加刚性等级。
■ 请检查增益是否有裕量以避免伺服系统处于临界稳定状态。
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
H09-00 自调整模式选择
0- 参数自调整无效,手动调节
增益参数
1- 参数自调整模式,用刚性表
自动调节增益参数
2 - 定位模式,用刚性表自动
调节增益参数
- 0
立即
生效
运行
设定
PST
H09-01 刚性等级选择 0~31 - 12
立即
生效
运行
设定
PST
推荐刚性等级 负载机构类型
4 级 ~8 级 一些大型机械
8 级 ~15 级 皮带等刚性较低的应用
15 级 ~20 级 滚珠丝杠、直连等刚性较高的应用
4
IS620P
系列伺服用户手册简易版 第
4
章 运行模式与调试方法
- 105 -
4.7.3 手动增益调整
手动增益调整时,需要将 H09-00 设为 0,再单独调整几个增益相关的参数。
加大位置环增益和速度环增益都会使系统的响应变快,但是太大的增益会引起系统不稳定。此外
在负载惯量比基本准确的前提下,速度环增益和位置环增益应满足一定的关系,如下所示,否则
系统也容易不稳定。
1
3
H08-00[Hz]
H08-02[Hz]
1
≤
≤
加大转矩指令滤波时间 H07-05 对抑制机械共振有帮助,但会降低系统的响应,相对速度环增益,
滤波时间不能随意加大,应满足如下条件:
H08-00
2 ×H07-05×4
1000
≤
Π
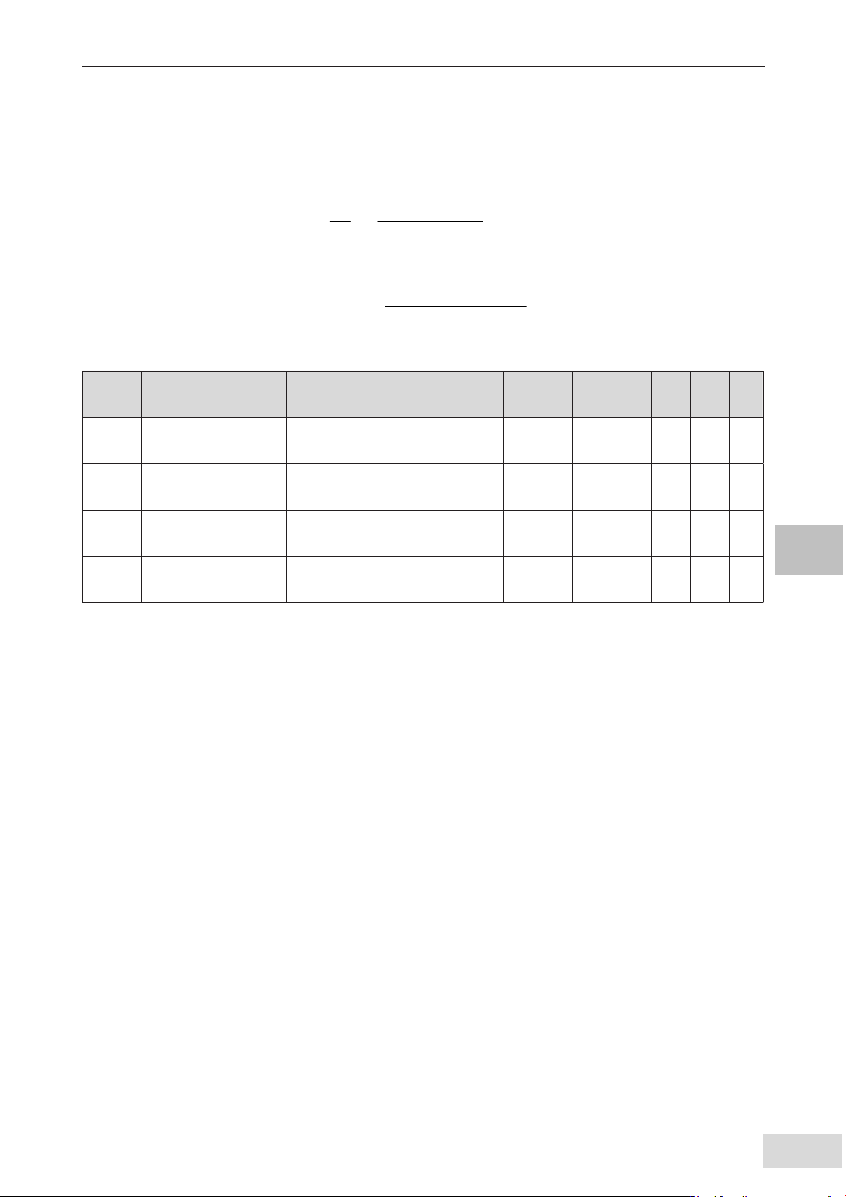
☆相关功能码如下:
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
H08-00 速度环增益 0.1~2000.0 Hz 25.0
立即
生效
运行
设定
PS
H08-01 速度环积分时间常数 0.15~512.00 ms 31.83
立即
生效
运行
设定
PS
H08-02 位置环增益 0.0~2000.0 Hz 40.0
立即
生效
运行
设定
P
H07-05
转矩指令滤波时间
常数
0.00~30.00 ms 0.79
立即
生效
运行
设定
PST
4.7.4 陷波器
机械系统具有一定的共振频率,若伺服增益设置过高,则有可能在机械共振频率附近产生共振,
此时可考虑使用陷波器。陷波器通过降低特定频率的增益达到抑制机械共振目的,增益也因此可
以设置的更高。
共有 4 组陷波器每组陷波器均有 3 个参数,分别为频率,宽度等级和衰减等级。当频率为默认值
4000Hz 时,陷波器实际无效。其中第 1 和第 2 组陷波器为手动陷波器,各参数由用户手动设定。
第 3 和第 4 组陷波器为自适应陷波器,当开启自适应滤波器模式时,由驱动器自行设置,如不开
启自适应滤波器模式,也可以手动设置。
自适应陷波器的模式由 H09-02 功能码进行控制。H09-02 设为 1 时,第 3 组陷波器有效,当伺服
使能且检测到共振发生时参数会被自动设定以抑制振动。H09-02 设为 2 时,第 3 和第 4 组陷波
器共同有效,两组陷波器都可以被自动设定。
若使用陷波器抑制共振,优先使用自适应陷波器。如果自适应陷波器无效或效果不佳,可以使用
手动陷波器。使用手动陷波器时,将频率参数设置为实际的共振频率。此频率可以由后台软件的
机械特性分析工具得到。宽度等级建议保持默认值 2。深度等级根据情况进行调节,此参数设的
越小,对共振的抑制效果越强,设的越大,抑制效果越弱,如果设为 99,则几乎不起作用。虽然
降低深度等级会增强抑制效果,但也会导致相位滞后,可能使系统不稳定,因此不可随意降低。