IS620P系列伺服用户手册.pdf - 第106页
4 第 4 章 运行模式与调试方法 IS620P 系列伺服用户手册简易版 - 106 - 注: ■ 陷波器只能在转矩模式以外的模式下使用; ■ 如果 H09 02 一直设为 1 或 2 ,自适应陷波器更新的参数每隔 30 分钟自动写入 EEPROM 一次, 在 30 分钟内的更新则不会存入 EEPROM 。 ■ H09 02 设为 0 时,自适应滤波器会保持当前参数不再发生变化。在使用自适应滤波器正确抑振 且稳定一段时间后。可以…
4
IS620P
系列伺服用户手册简易版 第
4
章 运行模式与调试方法
- 105 -
4.7.3 手动增益调整
手动增益调整时,需要将 H09-00 设为 0,再单独调整几个增益相关的参数。
加大位置环增益和速度环增益都会使系统的响应变快,但是太大的增益会引起系统不稳定。此外
在负载惯量比基本准确的前提下,速度环增益和位置环增益应满足一定的关系,如下所示,否则
系统也容易不稳定。
1
3
H08-00[Hz]
H08-02[Hz]
1
≤
≤
加大转矩指令滤波时间 H07-05 对抑制机械共振有帮助,但会降低系统的响应,相对速度环增益,
滤波时间不能随意加大,应满足如下条件:
H08-00
2 ×H07-05×4
1000
≤
Π
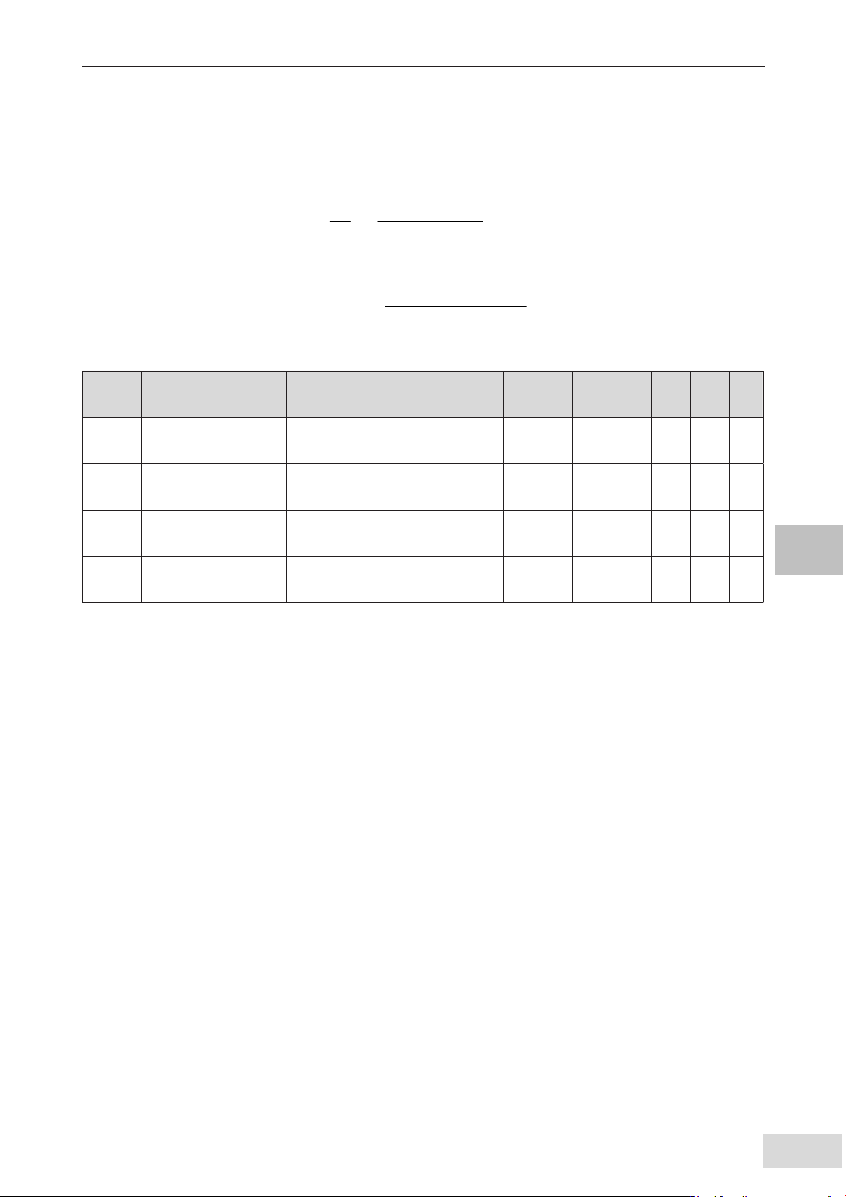
☆相关功能码如下:
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
H08-00 速度环增益 0.1~2000.0 Hz 25.0
立即
生效
运行
设定
PS
H08-01 速度环积分时间常数 0.15~512.00 ms 31.83
立即
生效
运行
设定
PS
H08-02 位置环增益 0.0~2000.0 Hz 40.0
立即
生效
运行
设定
P
H07-05
转矩指令滤波时间
常数
0.00~30.00 ms 0.79
立即
生效
运行
设定
PST
4.7.4 陷波器
机械系统具有一定的共振频率,若伺服增益设置过高,则有可能在机械共振频率附近产生共振,
此时可考虑使用陷波器。陷波器通过降低特定频率的增益达到抑制机械共振目的,增益也因此可
以设置的更高。
共有 4 组陷波器每组陷波器均有 3 个参数,分别为频率,宽度等级和衰减等级。当频率为默认值
4000Hz 时,陷波器实际无效。其中第 1 和第 2 组陷波器为手动陷波器,各参数由用户手动设定。
第 3 和第 4 组陷波器为自适应陷波器,当开启自适应滤波器模式时,由驱动器自行设置,如不开
启自适应滤波器模式,也可以手动设置。
自适应陷波器的模式由 H09-02 功能码进行控制。H09-02 设为 1 时,第 3 组陷波器有效,当伺服
使能且检测到共振发生时参数会被自动设定以抑制振动。H09-02 设为 2 时,第 3 和第 4 组陷波
器共同有效,两组陷波器都可以被自动设定。
若使用陷波器抑制共振,优先使用自适应陷波器。如果自适应陷波器无效或效果不佳,可以使用
手动陷波器。使用手动陷波器时,将频率参数设置为实际的共振频率。此频率可以由后台软件的
机械特性分析工具得到。宽度等级建议保持默认值 2。深度等级根据情况进行调节,此参数设的
越小,对共振的抑制效果越强,设的越大,抑制效果越弱,如果设为 99,则几乎不起作用。虽然
降低深度等级会增强抑制效果,但也会导致相位滞后,可能使系统不稳定,因此不可随意降低。
4
第
4
章
运行模式与调试方法
IS620P
系列伺服用户手册简易版
- 106 -
注:
■ 陷波器只能在转矩模式以外的模式下使用;
■ 如果 H0902 一直设为 1 或 2,自适应陷波器更新的参数每隔 30 分钟自动写入 EEPROM 一次,
在 30 分钟内的更新则不会存入 EEPROM。
■ H0902 设为 0 时,自适应滤波器会保持当前参数不再发生变化。在使用自适应滤波器正确抑振
且稳定一段时间后。可以使用此功能将自适应陷波器参数固定。
■ 虽然总共有 4 组陷波器,但建议最多 2 组陷波器同时工作,否则可能使振动加剧。
■ 共振频率在 300Hz 以下时,自适应陷波器的效果会有所降低。
■ 使用自适应陷波器的时候,如果振动长时间不能消除请及时关闭驱动器使能。
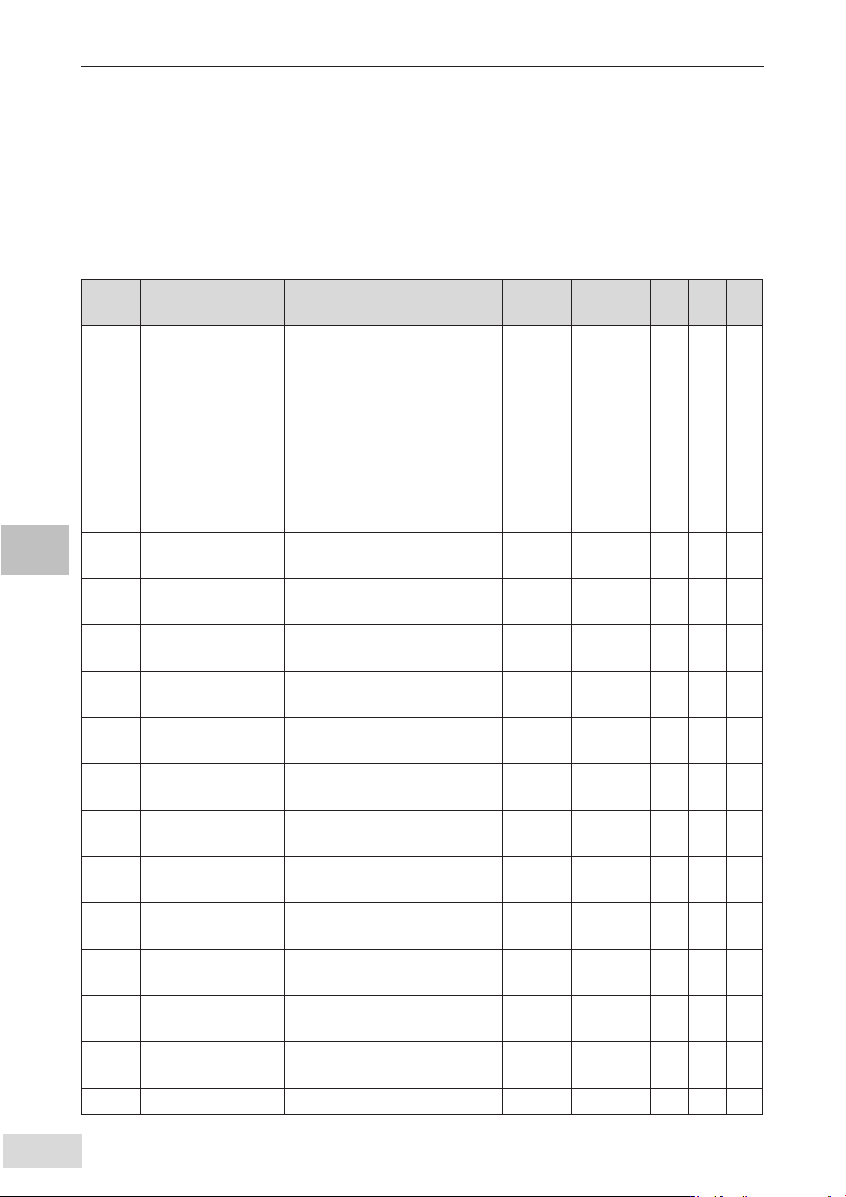
相关功能码如下:
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
H09-02
自适应陷波器模式
选择
0~4
0- 自适应滤波器不再更新;
1- 一个自适应滤波器有效;
( 第 3 组陷波器 )
2- 两个自适应滤波器有效;
( 第 3 组和第 4 组陷波器 )
3- 只检测共振频率,不更新陷波
器参数,H09-24 显示共振频率;
4- 恢复第 3 组和第 4 组陷波器
的值到出厂状态。
1 0
立即
生效
运行
设定
PST
H09-12 第 1 组陷波器频率 50 ~4000 Hz 4000
立即
生效
运行
设定
PS
H09-13
第 1 组陷波器宽度
等级
0~20 - 2
立即
生效
运行
设定
PS
H09-14
第 1 组陷波器深度
等级
0~99 - 0
立即
生效
运行
设定
PS
H09-15 第 2 组陷波器频率 50~4000 Hz 4000
立即
生效
运行
设定
PS
H09-16
第 2 组陷波器宽度
等级
0~20 - 2
立即
生效
运行
设定
PS
H09-17
第 2 组陷波器深度
等级
0~99 - 0
立即
生效
运行
设定
PS
H09-18 第 3 组陷波器频率 50~4000 Hz 4000
立即
生效
运行
设定
PS
H09-19
第 3 组陷波器宽度
等级
0~20 - 2
立即
生效
运行
设定
PS
H09-20
第 3 组陷波器衰减
等级
0~99 - 0
立即
生效
运行
设定
PS
H09-21 第 4 组陷波器频率 50~4000 Hz 4000
立即
生效
运行
设定
PS
H09-22
第 4 组陷波器宽度
等级
0~20 - 2
立即
生效
运行
设定
PS
H09-23
第 4 组陷波器衰减
等级
0~99 - 0
立即
生效
运行
设定
PS
H09-24 共振频率辨识结果 - Hz - - - PS

5
IS620P
系列伺服用户手册简易版 第
5
章 后台软件
- 107 -
第 5 章 后台软件
本公司网站 www.inovance.cn 提供免费下载和使用的后台软件 IS-Opera。配合公司提供的 PC 通
讯线缆 (S6-L-T00-3.0),可以使个人电脑与伺服驱动器通讯。通讯线缆也可以自制,接线方式见
配线章节。
IS-Opera 具有如下功能:
1. 示波器,可检测和保存伺服运行中的瞬时数据。
2. 电子凸轮,以图形化的形式设置电子凸轮的相关参数。( 仅对支持的驱动器有效 )
3. 参数管理,可批量读取和下载参数。
4. 数据库,可正确识别一些非标软件的功能码。
5. 惯量辨识,可通过一系列动作对负载惯量比进行辨识。
6. 机械特性分析,可分析出机械系统的共振频率。
7. 运动 JOG,可规划一段位置指令使电机反复运行。
8. 增益调整,可调整伺服的刚性等级并具有简易的运动信息监控功能。
9. IS-Opera 支持 WindowsXP 和 Windows7 操作系统。关于 IS-Opera 的详细使用方法,请参照
IS-Opera 的帮助文件。