IS620P系列伺服用户手册.pdf - 第131页
6 IS620P 系列伺服用户手册简易版 第 6 章 故障及处理措施 - 131 - 26 ) Er .620 :电机过载 产生机理: ● 电机累积热量过高,且达到故障阈值。 原因 确认方法 处理措施 1. 电机接线、编码 器接线错误、不良 ◆ 对比正确“接线图”,查看电机、驱动 器、编码器相互间线。 按照正确接线图连接线缆; 优先使用我司标配的线缆; 使用自制线缆时,请按照硬件接线指 导制作并连接。 2. 负载太重,电机 输出有效转矩…
6
第
6
章 故障及处理措施
IS620P
系列伺服用户手册简易版
- 130 -
23) Er.510:脉冲输出过速
产生机理:
● 使用脉冲输出功能 (H05-38=0 或 1) 时,输出脉冲频率超过硬件允许的频率上限 (2MHz)。
原因 确认方法 处理措施
输出脉冲频率超过
了硬件允许的频率
上限 (2MHz)
◆ H05-38=0( 编码器分频输出 ) 时,计算
发生故障时的电机转速对应的输出脉冲
频率,确认是否超限。
输出脉冲频率 (Hz)=
电机转速(rpm)
60
H05-17
减小 H05-17( 编码器分频脉冲数 ),
使得在机械要求的整个速度范围内,
输出脉冲频率均小于超过硬件允许的
频率上限。
◆ H05-38=1( 脉冲指令同步输出 ) 时,输
入脉冲频率超过 2MHz 或脉冲输入管
脚存在干扰。
低速脉冲输入管脚:
差分输入端子:PULSE+、PULSE-、
SIGN+、SIGN-,
最大脉冲频率 500kpps。
集电极开路输入端子:PULLHI、
PULSE+、PULSE-、SIGN+、SIGN-,
最大脉冲频率 200kpps。
高速脉冲输入管脚:
差分输入端子:HPULSE+、HPULSE-、
HSIGN+、HSIGN-,
最大脉冲频率:2Mpps。
减小输入脉冲频率至硬件允许的频率
上限以内
◆ 请注意:
此时,若不修改电子齿轮比,电机转
速会减小。
若输入脉冲频率本身已较高,但不超
过硬件允许的频率上限,应做好防
干扰措施 ( 脉冲输入接线使用双绞屏
蔽线,设置管脚滤波参数 H0A-24 或
H0A-30),防止干扰脉冲叠加在真实
脉冲指令上,造成误报故障。
24) Er.602:角度辨识失败
25) Er.610:驱动器过载
产生机理:
● 驱动器累积热量过高,且达到故障阈值。
6
IS620P
系列伺服用户手册简易版 第
6
章 故障及处理措施
- 131 -
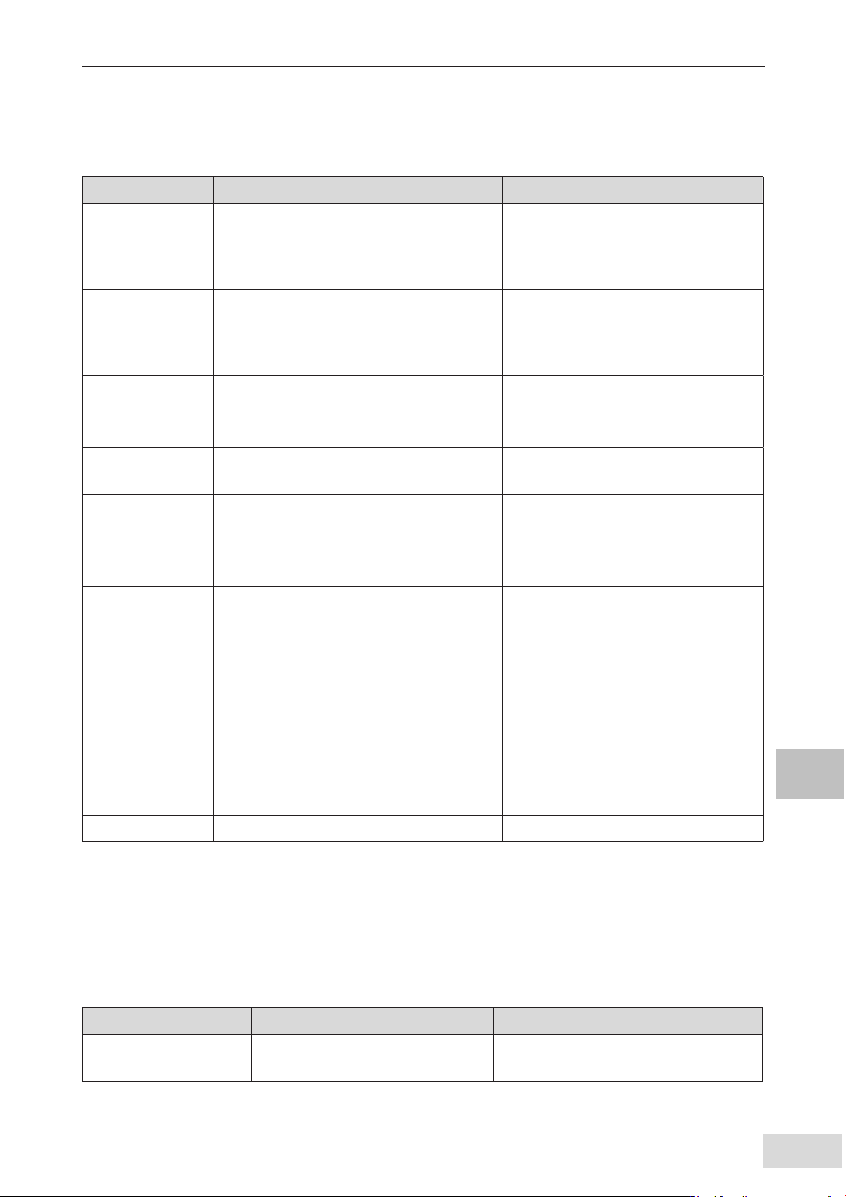
26) Er.620:电机过载
产生机理:
● 电机累积热量过高,且达到故障阈值。
原因 确认方法 处理措施
1. 电机接线、编码
器接线错误、不良
◆ 对比正确“接线图”,查看电机、驱动
器、编码器相互间线。
按照正确接线图连接线缆;
优先使用我司标配的线缆;
使用自制线缆时,请按照硬件接线指
导制作并连接。
2. 负载太重,电机
输出有效转矩超过
额定转矩,长时间
持续运转
◆ 确认电机或驱动器的过载特性;
◆ 查看驱动器平均负载率 (H0B-12) 是否
长时间大于 100.0%。
更换大容量驱动器及匹配的电机;
或减轻负载,加大加减速时间。
3. 加减速太频繁或
者负载惯量很大
◆ 计算机械惯量比或进行惯量辨识,查看
惯量比 H08-15;
◆ 确认伺服电机循环运行时单次运行周期。
增大单次运行中的加减速时间。
4. 增益调整不合适
或刚性太强
◆ 观察运行时电机是否振动,声音异常。 重新调整增益。
5. 驱动器或者电机
型号设置错误
◆ 对于 IS620P 系列产品:查看总线电机
型号 H00-05 和驱动器型号 H01-02。
◆ 对于 IS600P 系列产品:查看伺服电机
型号 H00-00 和驱动器型号 H01-02。
查看驱动器铭牌,对照 2.3 节,设置
正确的驱动器型号 (H01-02) 和电机型
号更新成匹配机型。
6. 因机械因素而导
致电机堵转,造成
运行时的负载过大
由汇川驱动调试平台或面板显示,确认运
行指令和电机转速 (H0B-00):
位置模式下运行指令:H0B-13
( 输入位置指令计数器 )
速度模式下运行指令:H0B-01
( 速度指令 )
转矩模式下运行指令:H0B-02
( 内部转矩指令 )
确认对应模式下,是否运行指令不为 0,
而电机转速为 0。
排除机械因素。
7. 伺服驱动器故障 ◆ 下电后,重新上电 , 仍报故障。 更换伺服驱动器。
■ 过载后 30s 方可清除故障或重启电源。
注:
27) Er.625:抱闸非正常关闭
产生机理:
● 抱闸保护开启后,抱闸输出信号有效,且输入指令为零的前 100~500ms,输出转矩小
于重力负载检测值的 70%。
原因 确认方法 处理措施
电机抱闸未打开
◆ 确认电机抱闸端信号是否有效,
电机抱闸开关是否损坏。
按照正确配线重新接线,或更换电机。
6
第
6
章 故障及处理措施
IS620P
系列伺服用户手册简易版
- 132 -
28) Er.626:抱闸非正常打开
产生机理:
● 抱闸保护开启后,抱闸输出信号无效,但此时检测到电机旋转了两圈以上。
原因 确认方法 处理措施
电机抱闸异常打开
◆ 确确认电机抱闸端信号是否有
效,电机抱闸开关是否损坏。
按照正确配线重新接线,或更换电机。
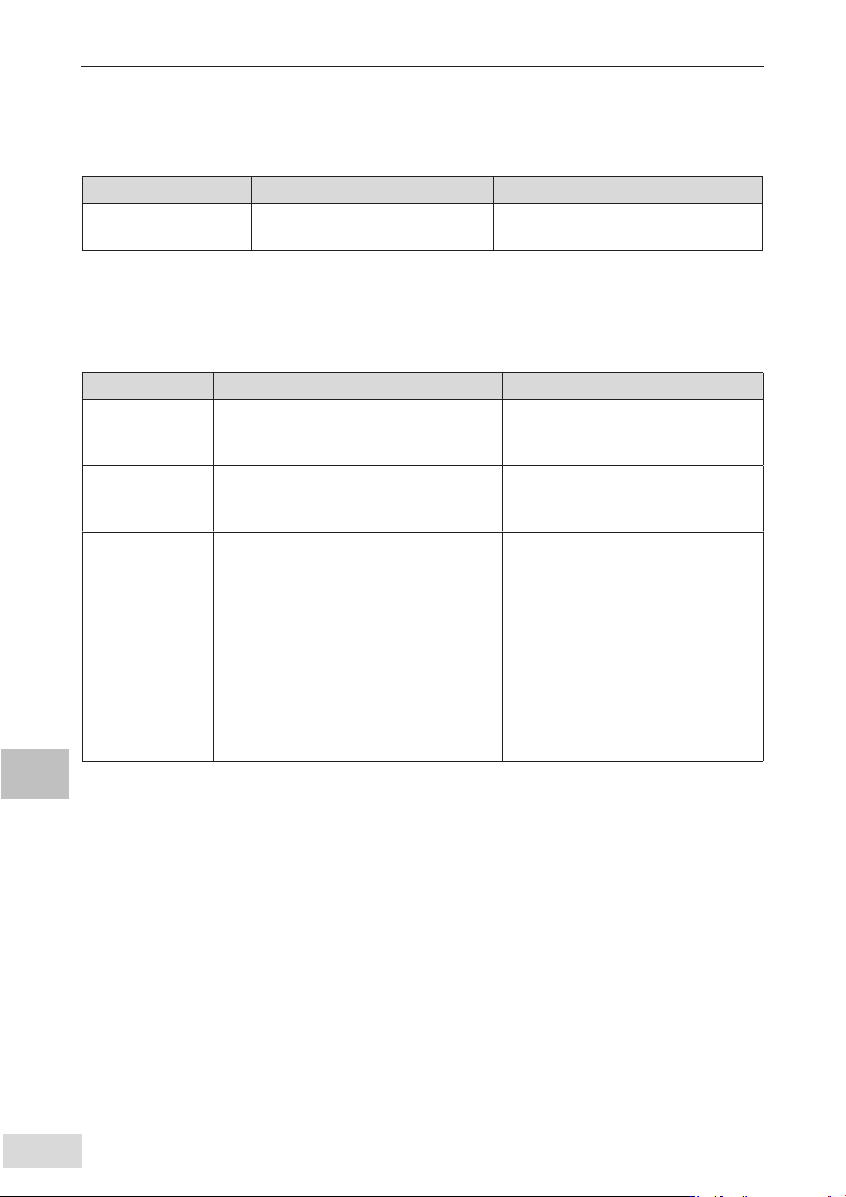
29) Er.630:堵转电机过热保护
产生机理:
● 电机实际转速低于 10rpm,但转矩指令达到限定值,且持续时间达到 H0A-32 设定值。
原因 确认方法 处理措施
1. 驱动器 U V W
输出缺相或相序
接错
◆ 无负载情况下进行电机试运行,并检查
接线。
按照正确配线重新接线,或更换线缆。
2. 驱动器 U V W
输出断线或编码器
断线
◆ 检查接线。 按照正确配线重新接线,或更换线缆。
3. 因机械因素导
致电机堵转
◆ 由汇川驱动调试平台或面板显示,确认
运行指令和电机转速 (H0B-00):
位置模式下运行指令:H0B-13
( 输入位置指令计数器 )
速度模式下运行指令:H0B-01
( 速度指令 )
转矩模式下运行指令:H0B-02
( 内部转矩指令 )
确认对应模式下,是否运行指令不为 0,
而电机转速为 0。
排查机械因素。