IS620P系列伺服用户手册.pdf - 第138页
6 第 6 章 故障及处理措施 IS620P 系列伺服用户手册简易版 - 138 - 41 ) Er .B03 :电子齿轮设定超限 产生机理: ● 任一组电子齿轮比超出限定值: (0.001 × 编码器分辨率 /10000 , 4000 × 编码器分辨率 /10000) 。 原因 确认方法 处理措施 电子齿轮比设定值 超过上述范围 ◆ 若 H05-02=0 ,确定参数 H05-07/H05- 09 , H05-1 1/H05-13 的比…
6
IS620P
系列伺服用户手册简易版 第
6
章 故障及处理措施
- 137 -
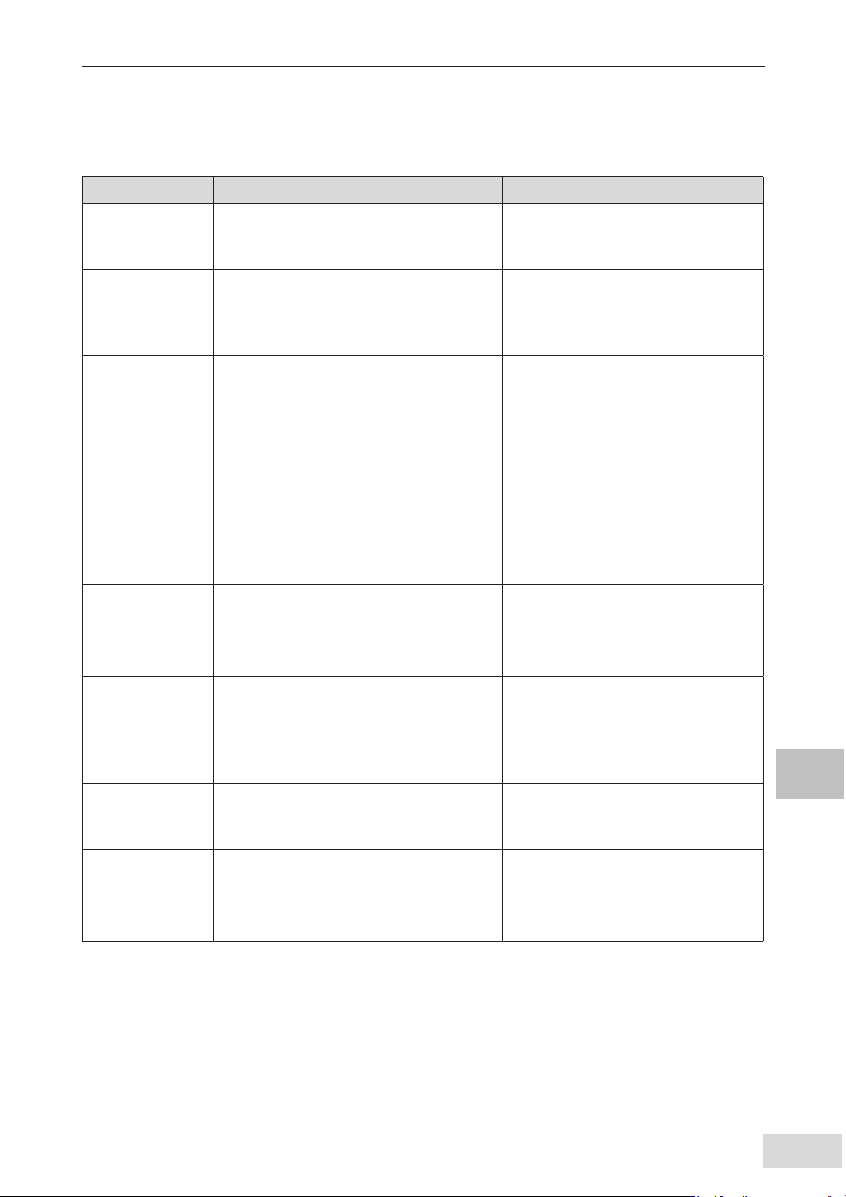
40) Er.B02:全闭环位置偏差过大
产生机理:
● 全闭环位置偏差绝对值超过 H0F-08( 全闭环位置偏差过大阈值 )。
原因 确认方法 处理措施
1. 驱动器 U V W
输出缺相或相序
接错
◆ 无负载情况下进行电机试运行,并检查
接线。
按照正确配线重新接线,或更换线缆。
2. 驱动器 U V W
输出断线或内 /
外编码器断线
◆ 检查接线。
重新接线,伺服电机动力线缆与驱动
器动力线缆 UVW 必须一一对应。必
要时应更换全新线缆,并确保其可靠
连接。
3. 因机械因素导致
电机堵转
◆ 由汇川驱动调试平台或面板显示,确认
运行指令和电机转速 (H0B-00):
位置模式下运行指令:H0B-13
( 输入位置指令计数器 )
速度模式下运行指令:H0B-01
( 速度指令 )
转矩模式下运行指令:H0B-02
( 内部转矩指令 )
确认对应模式下,是否运行指令不为 0,
而电机转速为 0。
排查机械因素。
4. 伺服驱动器增益
较低
◆ 检查伺服驱动器位置环增益和速度环增
益:
第一增益:H08-00~H08-02
第二增益:H08-03~H08-05
进行手动增益调整或者自动增益调整。
5. 输入脉冲频率
较高
◆ 位置指令来源为脉冲指令时,是否输入
脉冲频率过高。
◆ 加减速时间为 0 或过小
降低位置指令频率或减小电子齿轮比。
使用上位机输出位置脉冲时,可在上位
机中设置一定的加速度时间;
若上位机不可设置加减速时间,可增大
位置指令平滑参数 H05-04、H05-06。
6. 相对于运行条
件,故障值
(H0F-08) 过小
◆ 确认全闭环位置偏差过大故障阈值
(H0F-08) 是否设置过小。
增大 H0F-08 设定值。
7. 伺服驱动器 /
电机故障
◆ 通过汇川驱动调试平台的示波器功能监
控运行波形:
位置指令、位置反馈、速度指令、转矩指
令
若位置指令不为零而位置反馈始终为
零,请更换伺服驱动器 / 电机。
6
第
6
章 故障及处理措施
IS620P
系列伺服用户手册简易版
- 138 -
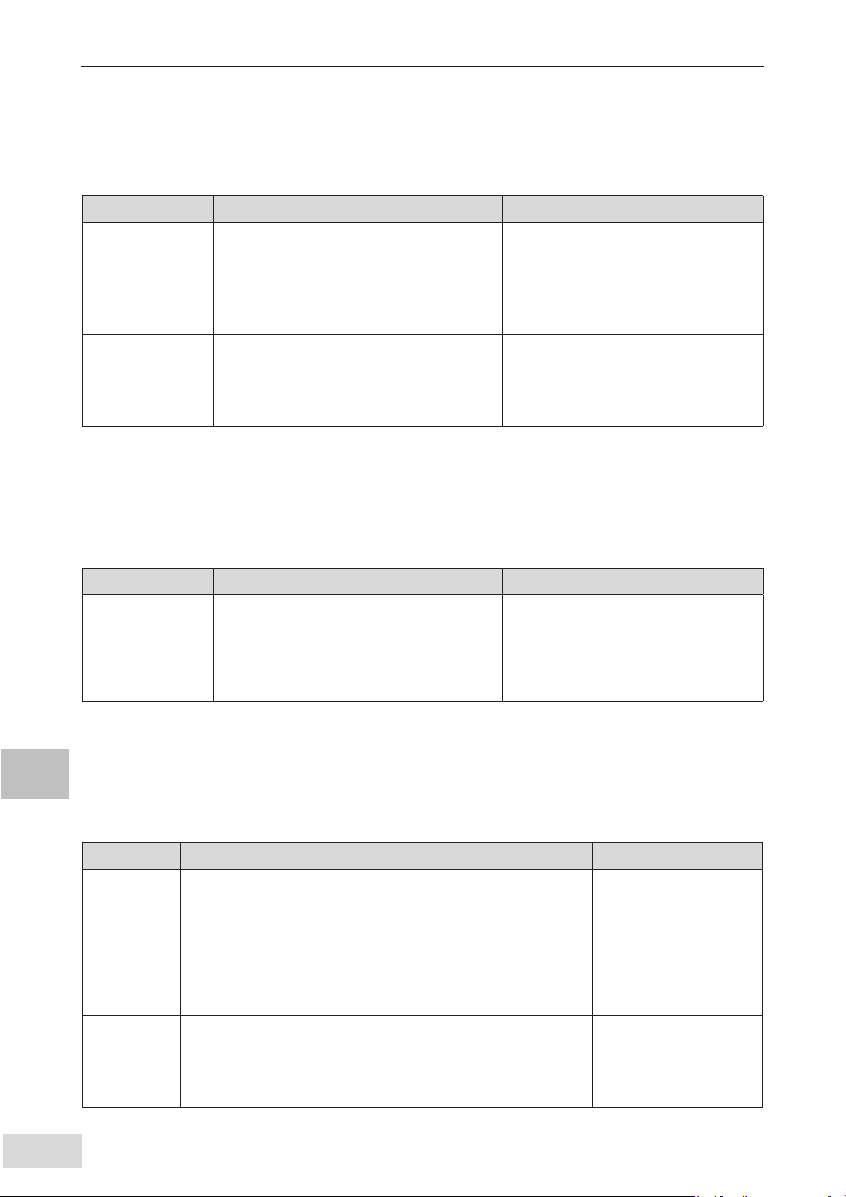
41) Er.B03:电子齿轮设定超限
产生机理:
● 任一组电子齿轮比超出限定值:(0.001×编码器分辨率 /10000,4000×编码器分辨率
/10000)。
原因 确认方法 处理措施
电子齿轮比设定值
超过上述范围
◆ 若 H05-02=0,确定参数 H05-07/H05-
09,H05-11/H05-13 的比值
◆ 若 H05-02>0,确定:编码器分辨率 /
H05-02,H05-07/H05-09,H05-11/
H05-13 的比值
将:
编码器分辨率 /H05-02、H05-07/H05-
09,H05-11/H05-13
比值设定在上述范围内。
参数更改顺序问题
◆ 更改电子齿轮比关联参数:
H05-02、H05-07/H05-09,H05-11/H05-
13 时,由于更改顺序不合理,导致计算电
子齿轮比的过渡过程发生电子齿轮比超限。
使用故障复位功能或重新上电即可。
42) Er.B04:全闭环功能参数设置错误
产生机理:
● 使用全闭环功能,且位置指令来源为内部位置指令时,使用了内外环切换功能。
原因 确认方法 处理措施
全闭环位置模式
下,位置指令来源
为内部位置指令,
但使用了内外环切
换模式
◆ 查看 H0F-00 是否为 2
◆ 确认是否位置指令来源为内部位置指
令:多段位置指令、中断定长功能
使用全闭环功能时,且位置指令来源
为内部位置指令时,仅可以使用外部
编码器反馈模式,即 H0F-00 仅能为 1。
43) Er.D03:CAN 通信连接中断
产生机理:
● CAN 通讯超时。
原因 确认方法 处理措施
CAN 通信连
接中断:从站
掉站
◆ 检查主站 PLC CAN 通信卡灯的状态:
主站 PLC 的 ERR 灯以 1Hz 的频率闪烁,且有部分从站 PLC
的 ERR 灯长亮
( 使用 PLC 后台软件时,可在主站的元件监控表中监控
D78xx,xx 表示站号,十进制,部分已配置的站点对应的
D78xx 为 5 表示该从站发生故障 )
检查 ERR 灯长亮的从站
与主站间的通讯线缆连
接情况;
检查 ERR 灯长亮的从站
通信波特率 H0C-08,
调整成与主站一致。
CAN 通信连
接中断:主
站掉站
◆ 检查主站 PLC CAN 通信卡灯的状态:
所有从站 PLC 的 ERR 灯长亮 ( 使用 PLC 后台软件时,可在
主站的元件监控表中监控 D78xx,xx 表示站号,十进制,所
有已配置的站点对应的 D78xx 全部为 5 表示主站发生故障 )
检查主站的线缆连接情
况。
6
IS620P
系列伺服用户手册简易版 第
6
章 故障及处理措施
- 139 -
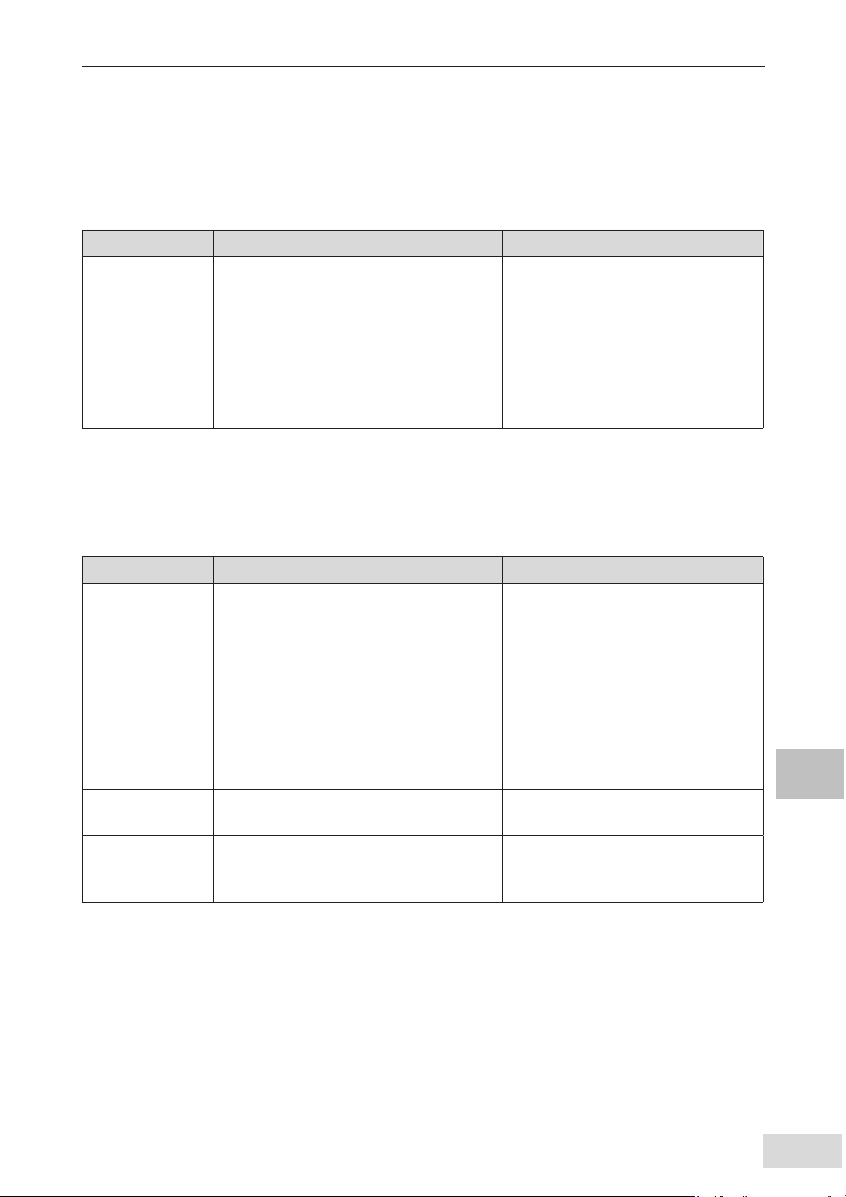
6.2.3 警告的处理方法
1) Er.110:分频脉冲输出设定故障
产生机理:
● 使用编码器分频输出功能 (H05-38=0) 时,设定的编码器分频脉冲数不符合由编码器规
格决定的阈值。
原因 确认方法 处理措施
编码器分频脉冲数
不符合范围
◆ 增量式码盘:编码器分频脉冲数不能超
过编码器分辨率;
20bit 总线式增量编码器,分辨率
1048576(P/r);
2500 线增量式编码器,分辨率 10000(P/
r);
◆ 绝对值码盘:编码器分频脉冲数不能超
过编码器分辨率的 1/4。
重新设置编码器分频脉冲数
(H05-17),使得其满足规定的范围。
2) Er.601:回原点超时故障
产生机理:
● 使用原点复归功能时 (H05-30=1~5),在 H05-35 设定的时间内,未找到原点。
原因 确认方法 处理措施
1. 原点开关故障
◆ 原点复归时一直在高速搜索而没有低速
搜索过程。
◆ 原点复归高速搜索后,一直处在反向低
速搜索过程。
若使用的是硬件 DI,确认 H03 组已设
置 DI 功能 31,然后检查 DI 端子接线
情况,手动使 DI 端子逻辑变化时,通
过 H0B-03 监控驱动器是否接收到对
应的 DI 电平变化,若否,说明 DI 开
关接线错误;若是,说明原点回归操
作存在错误,请参考 6.2.8 节,正确
操作该功能。
若使用的是虚拟 DI,参考 10.4 检查
VDI 使用过程是否正确。
2. 限定查找原点的
时间过短
◆ 查看 H05-35 所设定时间是否过小 增大 H05-35
3. 高速搜索原点开
关信号的速度过小
◆ 查看回零起始位置距离原点开关的距离,
判断 H05-32 所设定速度值是否过小,
导致寻找原点开关的时间过长
增大 H05-32