IS620P系列伺服用户手册.pdf - 第139页
6 IS620P 系列伺服用户手册简易版 第 6 章 故障及处理措施 - 139 - 6.2.3 警告的处理方法 1 ) Er .1 10 :分频脉冲输出设定故障 产生机理: ● 使用编码器分频输出功能 (H05-38=0) 时,设定的编码器分频脉冲数不符合由编码器规 格决定的阈值。 原因 确认方法 处理措施 编码器分频脉冲数 不符合范围 ◆ 增量式码盘:编码器分频脉冲数不能超 过编码器分辨率; 20bit 总线式增量编码器,分辨率 1…
6
第
6
章 故障及处理措施
IS620P
系列伺服用户手册简易版
- 138 -
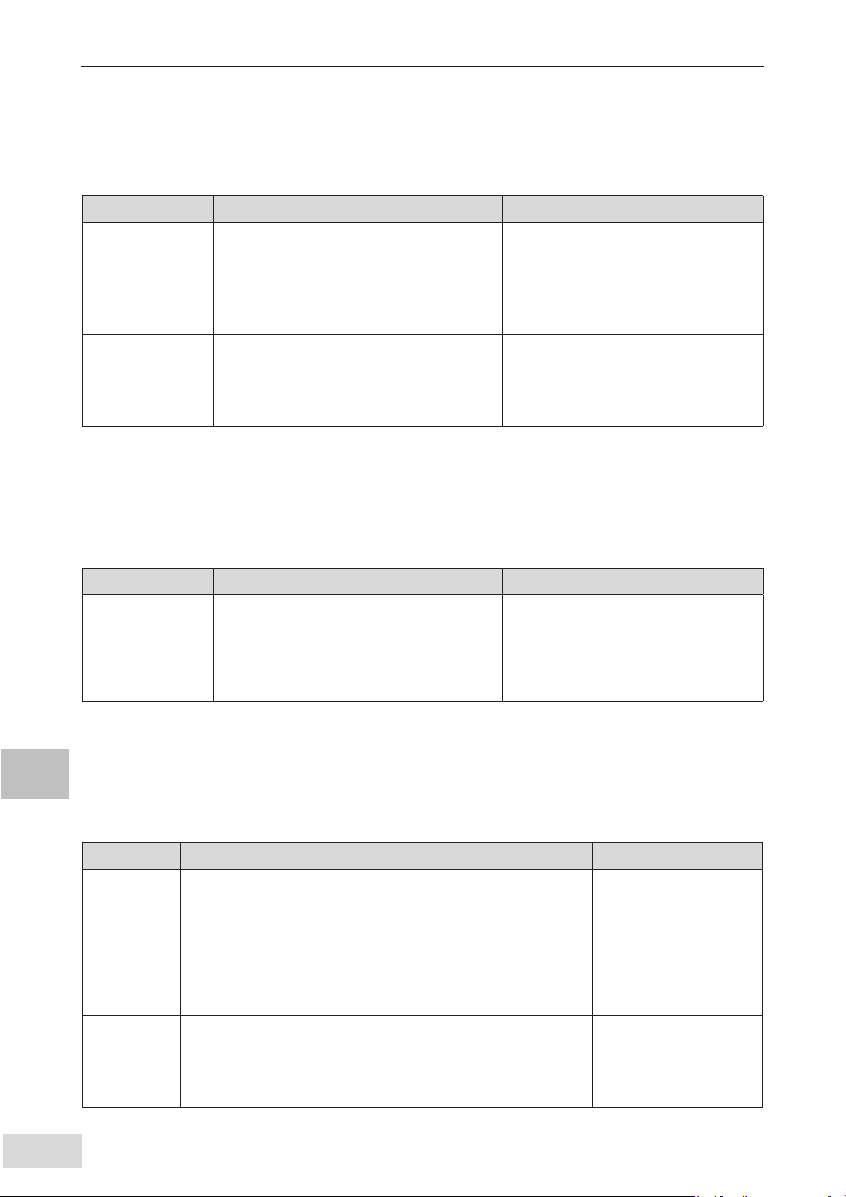
41) Er.B03:电子齿轮设定超限
产生机理:
● 任一组电子齿轮比超出限定值:(0.001×编码器分辨率 /10000,4000×编码器分辨率
/10000)。
原因 确认方法 处理措施
电子齿轮比设定值
超过上述范围
◆ 若 H05-02=0,确定参数 H05-07/H05-
09,H05-11/H05-13 的比值
◆ 若 H05-02>0,确定:编码器分辨率 /
H05-02,H05-07/H05-09,H05-11/
H05-13 的比值
将:
编码器分辨率 /H05-02、H05-07/H05-
09,H05-11/H05-13
比值设定在上述范围内。
参数更改顺序问题
◆ 更改电子齿轮比关联参数:
H05-02、H05-07/H05-09,H05-11/H05-
13 时,由于更改顺序不合理,导致计算电
子齿轮比的过渡过程发生电子齿轮比超限。
使用故障复位功能或重新上电即可。
42) Er.B04:全闭环功能参数设置错误
产生机理:
● 使用全闭环功能,且位置指令来源为内部位置指令时,使用了内外环切换功能。
原因 确认方法 处理措施
全闭环位置模式
下,位置指令来源
为内部位置指令,
但使用了内外环切
换模式
◆ 查看 H0F-00 是否为 2
◆ 确认是否位置指令来源为内部位置指
令:多段位置指令、中断定长功能
使用全闭环功能时,且位置指令来源
为内部位置指令时,仅可以使用外部
编码器反馈模式,即 H0F-00 仅能为 1。
43) Er.D03:CAN 通信连接中断
产生机理:
● CAN 通讯超时。
原因 确认方法 处理措施
CAN 通信连
接中断:从站
掉站
◆ 检查主站 PLC CAN 通信卡灯的状态:
主站 PLC 的 ERR 灯以 1Hz 的频率闪烁,且有部分从站 PLC
的 ERR 灯长亮
( 使用 PLC 后台软件时,可在主站的元件监控表中监控
D78xx,xx 表示站号,十进制,部分已配置的站点对应的
D78xx 为 5 表示该从站发生故障 )
检查 ERR 灯长亮的从站
与主站间的通讯线缆连
接情况;
检查 ERR 灯长亮的从站
通信波特率 H0C-08,
调整成与主站一致。
CAN 通信连
接中断:主
站掉站
◆ 检查主站 PLC CAN 通信卡灯的状态:
所有从站 PLC 的 ERR 灯长亮 ( 使用 PLC 后台软件时,可在
主站的元件监控表中监控 D78xx,xx 表示站号,十进制,所
有已配置的站点对应的 D78xx 全部为 5 表示主站发生故障 )
检查主站的线缆连接情
况。
6
IS620P
系列伺服用户手册简易版 第
6
章 故障及处理措施
- 139 -
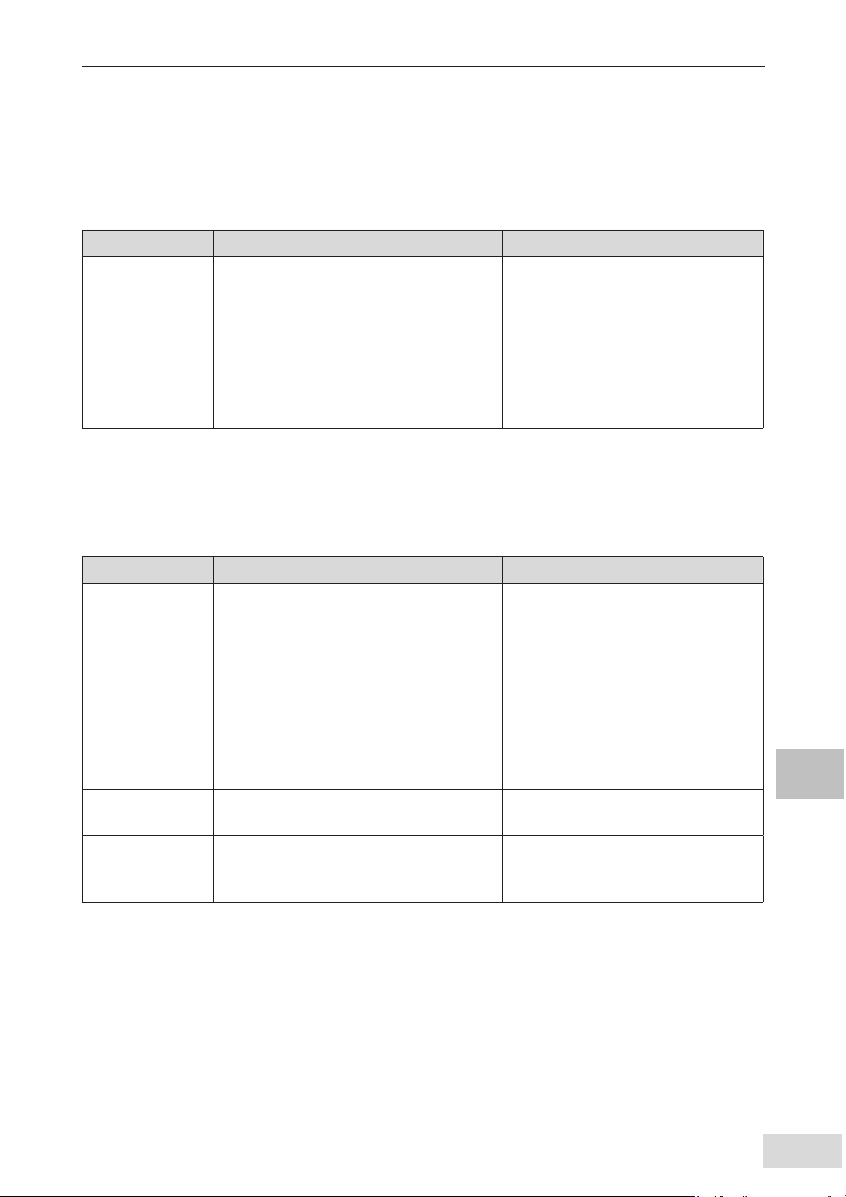
6.2.3 警告的处理方法
1) Er.110:分频脉冲输出设定故障
产生机理:
● 使用编码器分频输出功能 (H05-38=0) 时,设定的编码器分频脉冲数不符合由编码器规
格决定的阈值。
原因 确认方法 处理措施
编码器分频脉冲数
不符合范围
◆ 增量式码盘:编码器分频脉冲数不能超
过编码器分辨率;
20bit 总线式增量编码器,分辨率
1048576(P/r);
2500 线增量式编码器,分辨率 10000(P/
r);
◆ 绝对值码盘:编码器分频脉冲数不能超
过编码器分辨率的 1/4。
重新设置编码器分频脉冲数
(H05-17),使得其满足规定的范围。
2) Er.601:回原点超时故障
产生机理:
● 使用原点复归功能时 (H05-30=1~5),在 H05-35 设定的时间内,未找到原点。
原因 确认方法 处理措施
1. 原点开关故障
◆ 原点复归时一直在高速搜索而没有低速
搜索过程。
◆ 原点复归高速搜索后,一直处在反向低
速搜索过程。
若使用的是硬件 DI,确认 H03 组已设
置 DI 功能 31,然后检查 DI 端子接线
情况,手动使 DI 端子逻辑变化时,通
过 H0B-03 监控驱动器是否接收到对
应的 DI 电平变化,若否,说明 DI 开
关接线错误;若是,说明原点回归操
作存在错误,请参考 6.2.8 节,正确
操作该功能。
若使用的是虚拟 DI,参考 10.4 检查
VDI 使用过程是否正确。
2. 限定查找原点的
时间过短
◆ 查看 H05-35 所设定时间是否过小 增大 H05-35
3. 高速搜索原点开
关信号的速度过小
◆ 查看回零起始位置距离原点开关的距离,
判断 H05-32 所设定速度值是否过小,
导致寻找原点开关的时间过长
增大 H05-32
6
第
6
章 故障及处理措施
IS620P
系列伺服用户手册简易版
- 140 -
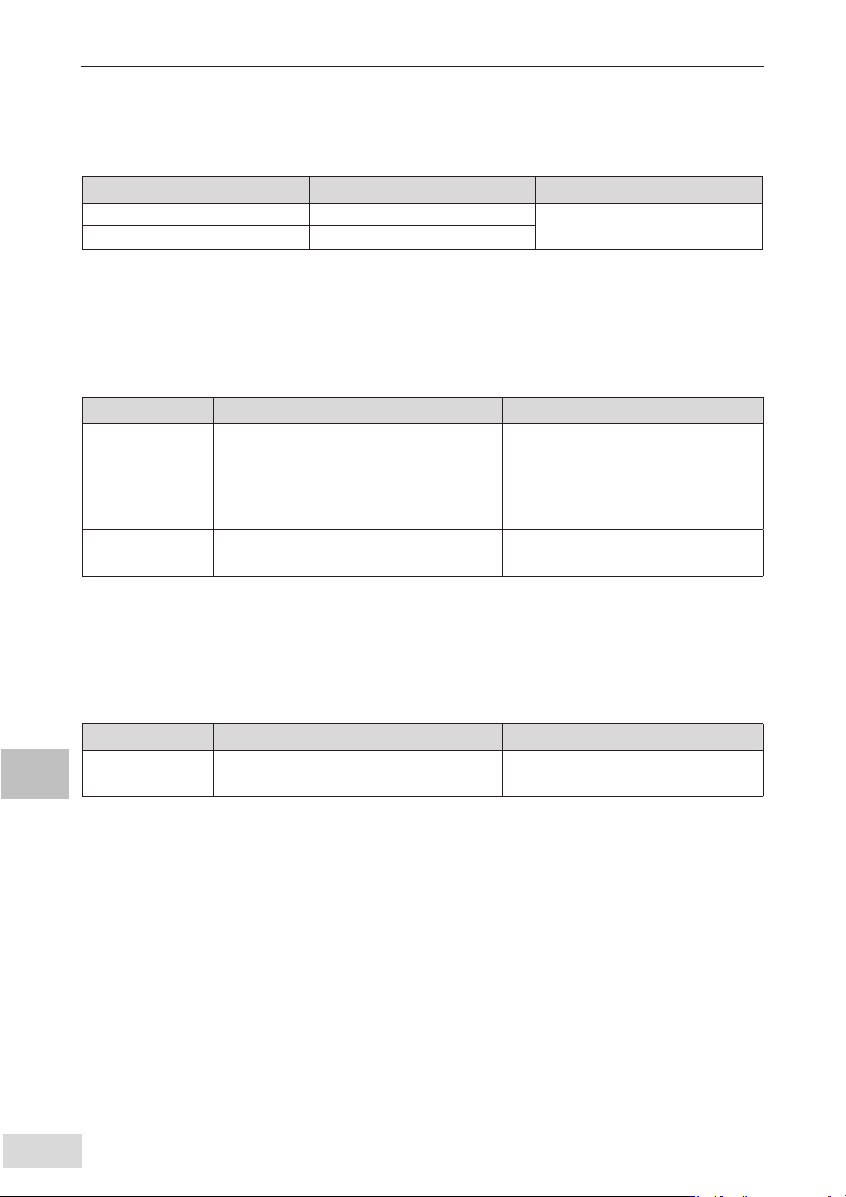
3) Er.730: 编码器电池警告
产生机理:
● 多圈绝对值编码器的编码器电池电压过低或未接电池
原因 确认方法 处理措施
断电期间,未接电池 ◆ 确认断电期间是否连接
更换新的电压匹配的电池
编码器电池电压过低 ◆ 测量电池电压
注:此故障仅在使能多圈绝对位置功能时(H0201=1 或 2)才会发生。
4) Er.831:AI 零漂过大
产生机理:
● AI( 包括 AI1 和 AI2) 端子输入电压为 0V 时,驱动器采样得到的电压大于 500mV
原因 确认方法 处理措施
1. 接线错误或存在
干扰
◆ 参考正确配线图检查接线。
采用双绞屏蔽线重新接线,缩短线路
长度。
增大 AI 通道滤波时间常数:
AI1 滤波时间常数:H03-51
AI2 滤波时间常数:H03-56
2. 伺服驱动器故障
◆ 去掉 AI 端子外部接线 ( 输入为 0),查看
H0B 组 AI 采样值是否超过 500mV。
若超过,更换驱动器。
5) Er.900:DI 紧急刹车
产生机理:
● DI 功能 34(FunIN.34:刹车,Emergency) 对应的 DI 端子逻辑有效 ( 包括硬件 DI 和虚
拟 DI)。
原因 确认方法 处理措施
DI 功能 34:刹车,
被触发
◆ 检查 DI 功能 34:EmergencyStop 刹车,
及其对应 DI 端子逻辑是否被置为有效。
检查运行模式,确认安全的前提下,
解除 DI 刹车有效信号。