IS620P系列伺服用户手册.pdf - 第143页
6 IS620P 系列伺服用户手册简易版 第 6 章 故障及处理措施 - 143 - 8 ) Er .922 :外接制动电阻过小 产生机理: ● H02-27( 外接制动电阻阻值 ) 小于 H02-21( 驱动器允许的外接制动电阻的最小值 ) 。 原因 确认方法 处理措施 使用外接制动电阻时 (H02-25=1 或 2) , 外接制动电阻阻值 小于驱动器允许的 最小值 ◆ 测量 P ⊕、 C 之间外接制动电阻阻值, 确认是否小于 H02…
6
第
6
章 故障及处理措施
IS620P
系列伺服用户手册简易版
- 142 -
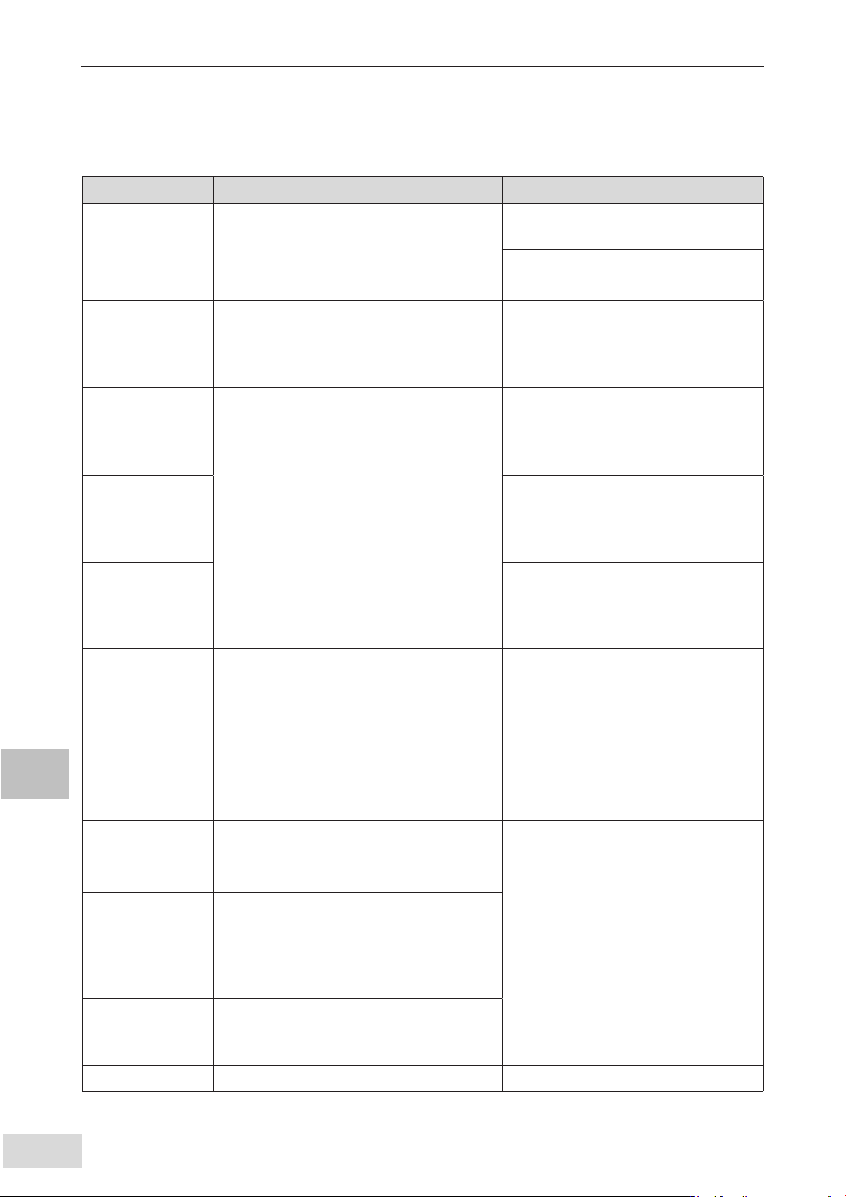
7) Er.920:制动电阻过载报警
产生机理:
● 制动电阻累积热量大于设定值。
原因 确认方法 处理措施
1、外接制动电阻
器接线不良、脱落
或断线
◆ 将外接制动电阻取下,直接测量电阻阻
值是否为“∞”( 无穷大 );
◆ 测量 P ⊕、C 之间阻值是否为“∞”
◆ ( 无穷大 )。
更换新的外接制动电阻,测量电阻阻
值与标称值一致后,接于 P ⊕、C 之间。
选用良好线缆,将外接制动电阻两端
分别接于 P ⊕、C 之间。
2. 使用内置制动
电阻时,电源端子
P ⊕、D 之间的线
缆短线或脱落
◆ 测量 P ⊕、D 之间阻值是否为“∞”
( 无穷大 )。
用良好线缆将 P ⊕、D 直接相连。
3. 使用外接制动
电阻时,H02-25(
制动电阻设置 ) 选
择错误
◆ 查看 H02-25 参数值;
◆ 测量实际选用的 P ⊕、C 之间外接电阻
阻值,并与制动电阻规格表对比,是否
过大
◆ 查看 H02-27 参数值,是否大于实际选
用的 P ⊕、C 之间外接电阻阻值。
设置正确 H02-25:
H02-25=1( 使用外接电阻,自然冷却 )
H02-25=2( 使用外接电阻,强迫风冷 )
4. 使用外接制动
电阻时,实际选
用的外接制动电
阻阻值过大
参考制动电阻规格表,正确选用阻值
合适的电阻。
5.H02-27( 外接制
动电阻阻值 ) 大于
实际外接制动电
阻阻值
设置 H02-27 与实际选用外接电阻阻
值一致。
6. 主回路输入电
压超过规格范围
◆ 测量主回路线缆驱动器侧输入电压是否
符合以下规格:
220V 驱动器:
有效值:220V~240V
允许偏差:-10%~+10%(198V~264V)
380V 驱动器:
有效值: 380V~440V
允许偏差:-10%~+10%(342V~484V)
按照左侧规格,调整或更换电源。
7. 负载转动惯量比
过大
◆ 进行转动惯量辨识;或根据机械参数,
手动计算机械总惯量;
◆ 实际负载惯量比是否超过 30。
选用大容量的外接制动电阻,并设置
H02-26 与实际值一致;
选用大容量伺服驱动器;
允许情况下,减小负载;
允许情况下,加大加减速时间;
允许情况下,加大电机运行周期。
8. 电机速度过高,
在设定的减速时间
内减速过程未完
成,周期性运动时,
处于连续减速状态
◆ 查看周期性运动时电机的速度曲线,
检查电机是否长时间处于减速状态。
9. 伺服驱动器的容
量或制动电阻容量
不足
◆ 查看电机单周期的速度曲线,计算最大
制动能量是否可被完全吸收。
10. 伺服驱动器故障 - 更换新的伺服驱动器。
6
IS620P
系列伺服用户手册简易版 第
6
章 故障及处理措施
- 143 -
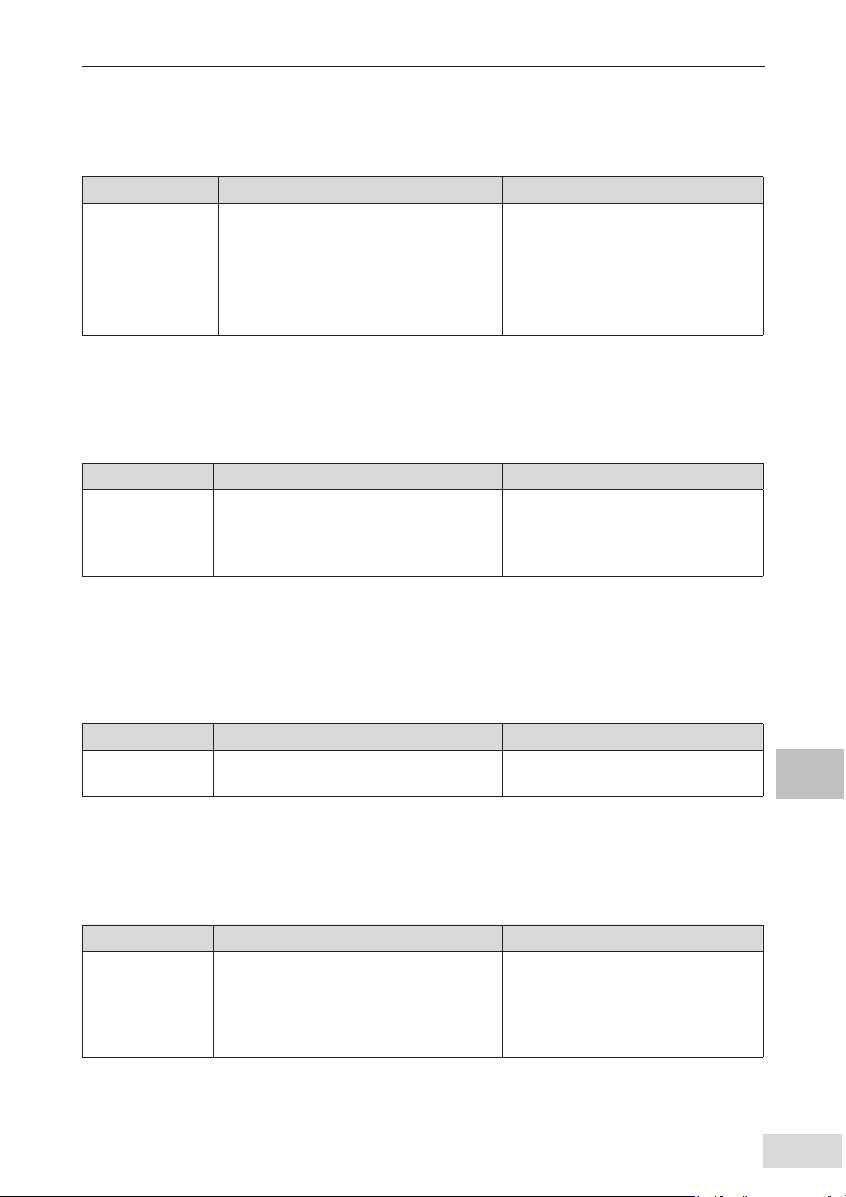
8) Er.922:外接制动电阻过小
产生机理:
● H02-27( 外接制动电阻阻值 ) 小于 H02-21( 驱动器允许的外接制动电阻的最小值 )。
原因 确认方法 处理措施
使用外接制动电阻时
(H02-25=1 或 2),
外接制动电阻阻值
小于驱动器允许的
最小值
◆ 测量 P ⊕、C 之间外接制动电阻阻值,
确认是否小于 H02-21。
若是,则更换为与驱动器匹配的外接
制动电阻,设置 H02-27 为选用的电阻
阻值后,将电阻两端分别接于 P ⊕、C
之间;
若否,设置 H02-27 为实际外接制动电
阻阻值。
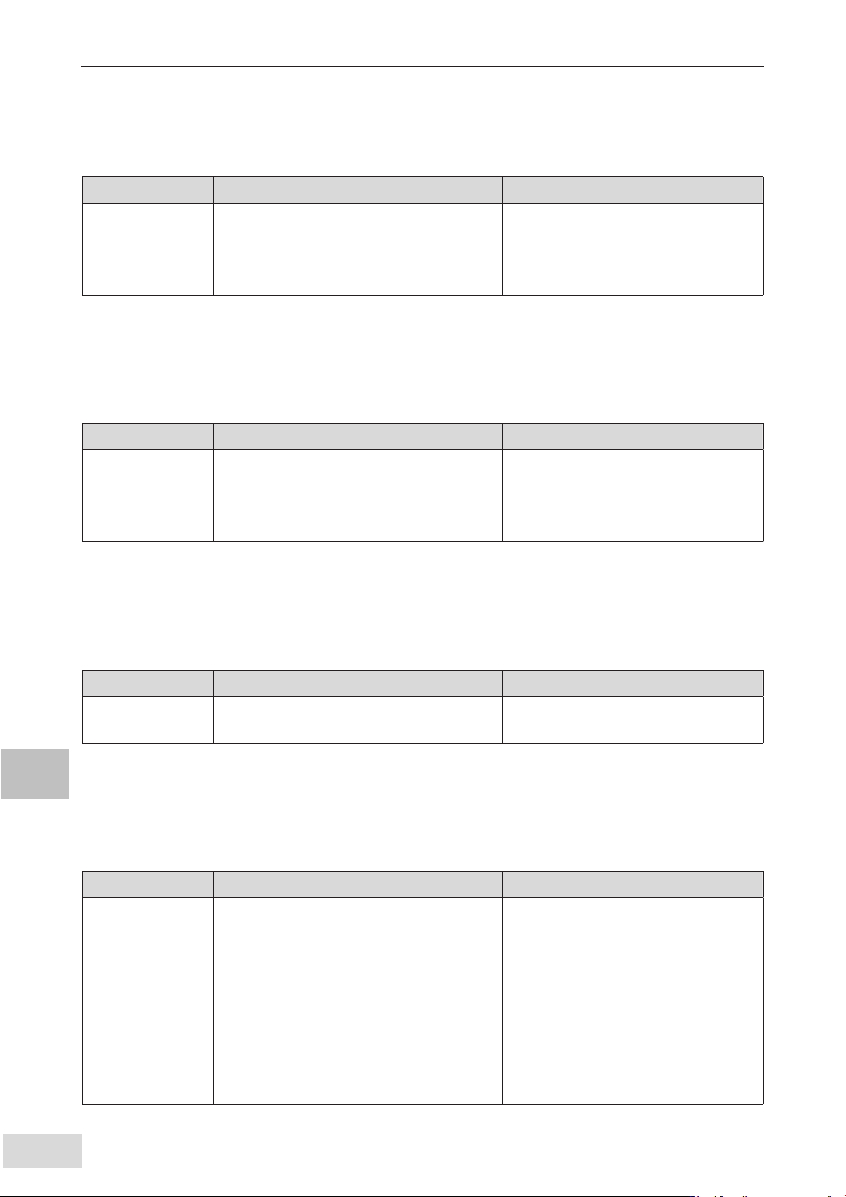
9) Er.939:电机动力线断线
产生机理:
● 电机实际相电流不到额定电流的 10%,且实际转速小,但内部转矩指令很大。
原因 确认方法 处理措施
电机动力线断线
◆ 查看相电流有效值 (H0B-24) 与内部转
矩指令 (H0B-02) 是否有 5 倍以上差距,
同时实际电机转速 (H0B-00) 小于电机
额定转速的 1/4。
检查电机动力线缆接线,重新接线,
必要时更换线缆。
10) Er.941:变更参数需重新上电生效
产生机理:
● 伺服驱动器的功能码属性“生效时间”为“再次通电”时,该功能码参数值变更后,驱
动器提醒用户需要重新上电。
原因 确认方法 处理措施
变更了再次通电后
更改生效的功能码
◆ 确认是否更改了“生效时间”为“重新
上电”的功能码。
重新上电。
11) Er.942:参数存储频繁
产生机理:
● 同时修改的功能码个数超过 200 个。
原因 确认方法 处理措施
非常频繁且大量
的修改功能码参
数,并存储入
EEPROM
(H0C-13=1)
◆ 检查上位机系统是否频繁、快速修改功
能码。
检查运行模式,对于无需存储在
EEPROM 参数,上位机写操作前将
H0C-13 设置为 0。
6
第
6
章 故障及处理措施
IS620P
系列伺服用户手册简易版
- 144 -
12) Er.950:正向超程警告
产生机理:
● DI 功能 14(FunIN.14:P-OT,正向超程开关 ) 对应的 DI 端子逻辑有效。
原因 确认方法 处理措施
DI 功能 14:禁止
正向驱动,端子
逻辑有效
◆ 检查 H03 组 DI 端子是否设置 DI 功能
14
◆ 查看输入信号监视 (H0B-03) 对应位的
DI 端子逻辑是否有效。
检查运行模式,确定安全的前提下,
给负向指令或转动电机,使“正向超
程开关”端子逻辑变为无效。
13) Er.952:反向超程警告
产生机理:
● DI 功能 15(FunIN.15:N-OT,反向超程开关 ) 对应的 DI 端子逻辑有效。
原因 确认方法 处理措施
DI 功能 15:禁止
反向驱动,端子
逻辑有效。
◆ 检查 H03 组 DI 端子是否设置了 DI 功能
15;
◆ 查看输入信号监视 (H0B-03) 对应位的
DI 端子逻辑是否有效。
检查运行模式,确定安全的前提下,
给负向指令或转动电机,使“反向超
程开关”端子逻辑变为无效。
14) Er.980:编码器内部故障
产生机理:
● 编码器算法出错。
原因 确认方法 处理措施
编码器内部故障
◆ 多次接通电源后仍报故障时, 编码器
产生故障。
更换伺服电机。
15) Er.990:输入缺相警告
产生机理:
● 允许 1kW 以下的驱动器允许单相运行,但使能了电源输入缺相故障和警告 (H0A-00)。
原因 确认方法 处理措施
H0A-00=1
( 电源输入缺相保
护选择:使能故
障和警告 ) 时,对
于 0.75kW 三相驱
动器 ( 驱动器型号
H01-02=5),允许
运行在单相电源
下,接入单相电
源时,会报警告。
◆ 确认是否为允许单相运行的三相驱动器
若实际为三相驱动器,且主回路电源
线连接三相电源,仍报警告,则按
Er.420 处理;
若实际为三相规格驱动器且允许单相
运行,且主回路电源线连接单相电源,
仍报警告,则将 H0A-00 置 0。