IS620P系列伺服用户手册.pdf - 第46页
3 第 3 章 伺服驱动器与电机的连接说明 IS620P 系列伺服用户手册简易版 - 46 - 3.3 控制信号端子连接方法 L1C L2C R S T - P + D C U V W CN3 CN4 CN1 CN2 CN1 31 32 33 34 35 1 17 2 18 3 19 4 20 5 21 36 6 22 7 23 8 24 9 25 10 26 43 11 27 12 28 37 38 39 40 41 42 13 14…
3
IS620P
系列伺服用户手册简易版 第
3
章 伺服驱动器与电机的连接说明
- 45 -
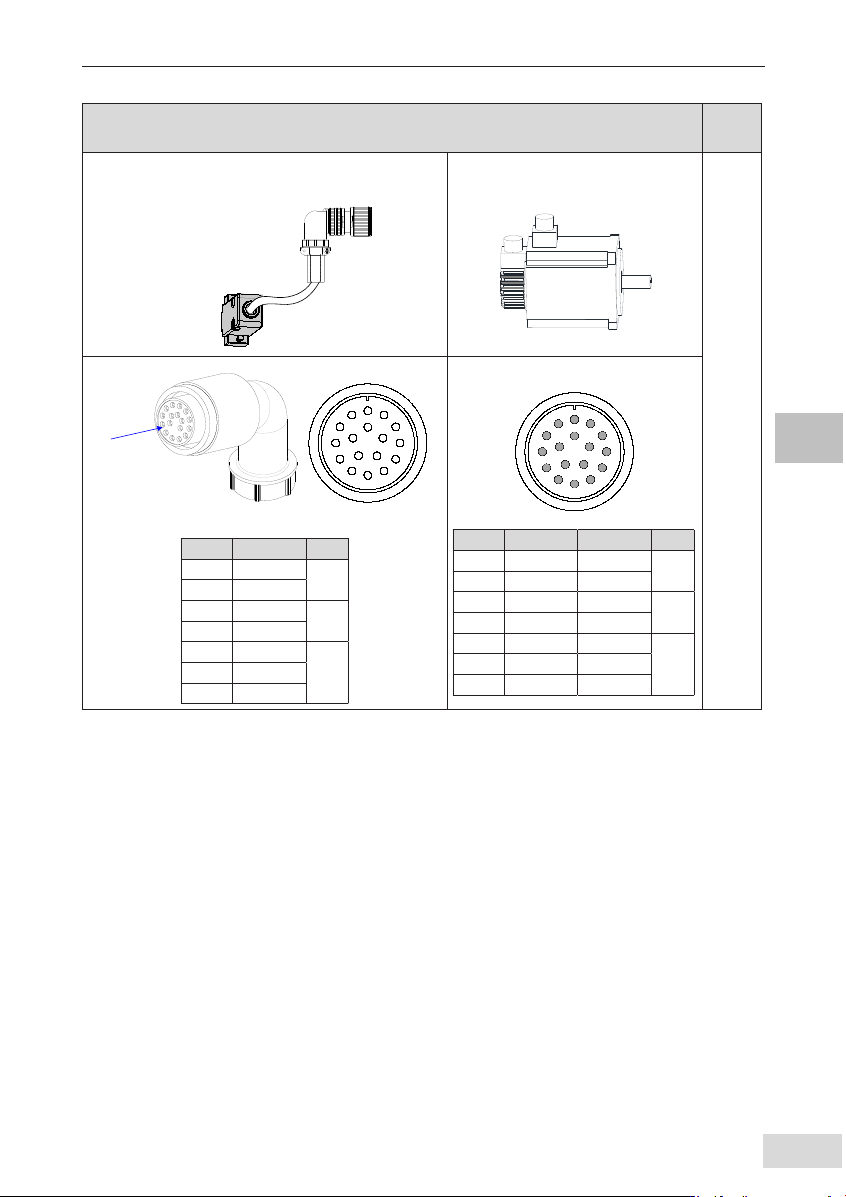
表 3-17 编码器线缆连接器(MIL-DTL-5015 系列 3108E20-29S 军规航插)
连接器外形图及端子引脚分布
适配电
机框号
编码器引出线
的连接器
接驱动器
CN2
编码器连接插座
100
130
180
此端视入
20-29航插
A
B
M
C
L
N
T
P
D
K
R
S
E
J
F
G
H
针脚号 信号名称
A PS+
对绞
B PS-
E 电池 +
F 电池 -
G +5V
H GND
J 屏蔽
20-29航插
A
M
B
L
C
N
P
T
K
D
S
R
J
E
H
G
F
针脚号 信号名称 颜色
A PS+ 黄
对绞
B PS- 黄黑
E 电池 + 蓝
F 电池 - 蓝黑
G +5V 红
H GND 黑
J 屏蔽
注:
电机框号,指安装法兰宽度。
3
第
3
章 伺服驱动器与电机的连接说明
IS620P
系列伺服用户手册简易版
- 46 -
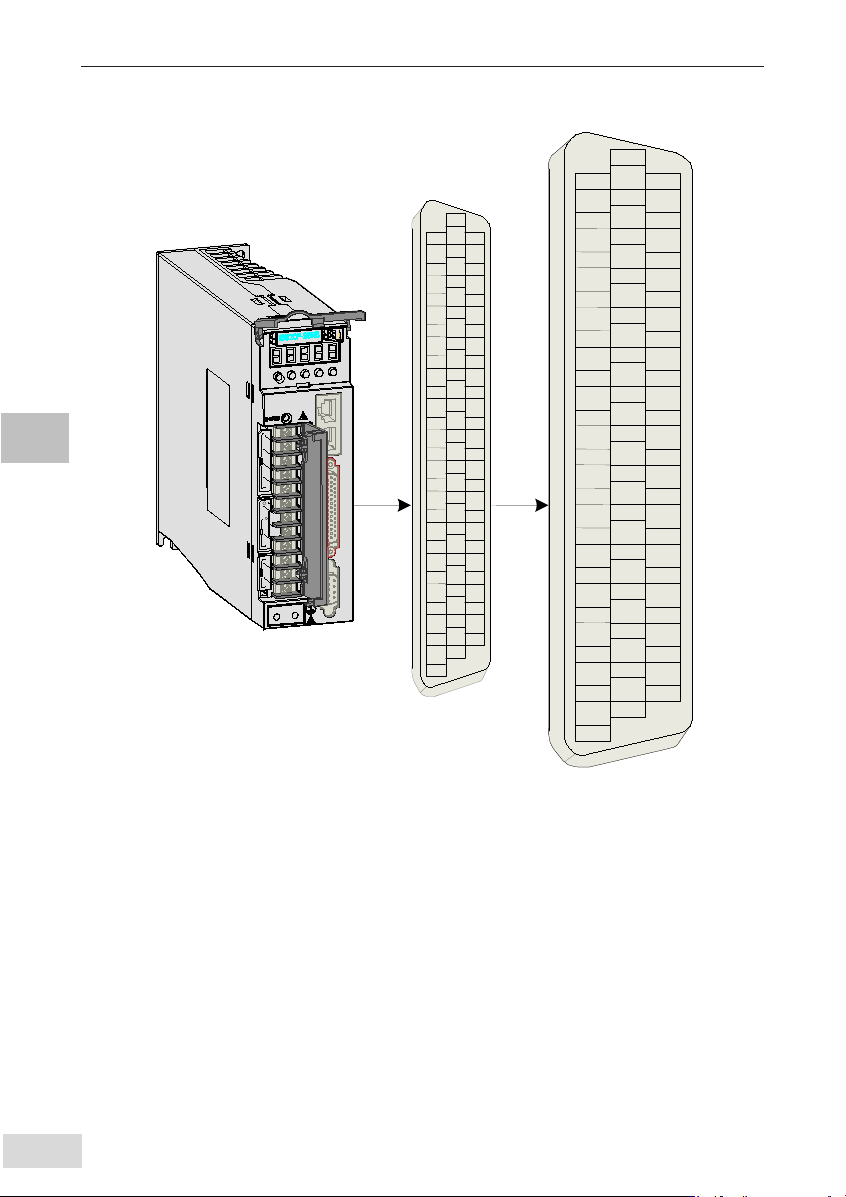
3.3 控制信号端子连接方法
L1C
L2C
R
S
T
-
P
+
D
C
U
V
W
CN3
CN4
CN1
CN2
CN1
31
32
33
34
35
1
17
2
18
3
19
4
20
5
21
36
6
22
7
23
8
24
9
25
10
26
43
11
27
12
28
37
38
39
40
41
42
13
14
15
16
29
30
44
CN1
DO4+
DO3-
GND
DO3+
DO2-
DO2+
DO1-
DO1+
DI4
DI1
DI2
COM+
DI9
COM-
+5V
AI2
GND
AI1
PAO+
PAO-
PBO-
PZO-
PBO+
DO4-
DO5-
GND
DI8
DI7
DI6
DI5
DI3
PULLHI
HPULSE-
SIGN+
HPULSE+
SIGN-
HSIGN-
PULSE+
HSIGN+
PULSE-
PZ
-OUT
PZO+
DO5+
+24V
图 3-13 驱动器控制回路端子连接器引脚分布图
CN1 端子:电缆侧插头塑壳:泰德康 DB25P 外壳黑色,芯:泰德康 HDB44P 焊线公座。
注意:位置模式、速度模式和转矩模式三种控制模式对应的配线图请参见“4.1.1 位置模式配线、4.2.1
速度模式配线、4.3.1 转矩模式配线”。
3
IS620P
系列伺服用户手册简易版 第
3
章 伺服驱动器与电机的连接说明
- 47 -
3.3.1 位置指令输入信号
下面就用户接口连接器的普通指令脉冲输入、指令符号输入信号及高速指令脉冲输入、指令符号
输入信号端子进行说明。
表 3-18 位置指令输入信号说明
信号名 针脚号 功能
位置指令
PULSE+
PULSE-
SIGN+
SIGN-
41
43
37
39
低速脉冲指令输入方式:
差分驱动输入
集电极开路
输入脉冲形态:
方向 + 脉冲
A、B 相正交脉冲
CW/CCW 脉冲
HPULSE+
HPULSE-
38
36
高速输入脉冲指令
HSIGN+
HSIGN-
42
40
高速位置指令符号
PULLHI 35 指令脉冲的外加电源输入接口
GND 29 信号地
上位装置侧指令脉冲及符号输出电路,可以从差分驱动器输出或集电极开路输出 2 种中选择。其
最大输入频率及最小脉宽如下表所示:
表 3-19 脉冲输入频率与脉宽对应关系
脉冲方式 最大频率 (pps) 最小脉宽 (us)
普通
差分 500k 1
集电极开路 200k 2.5
高速差分 4M 0.125
■ 上级装置输出脉冲宽度若小于最小脉宽值,会导致驱动器接收脉冲错误。
注:
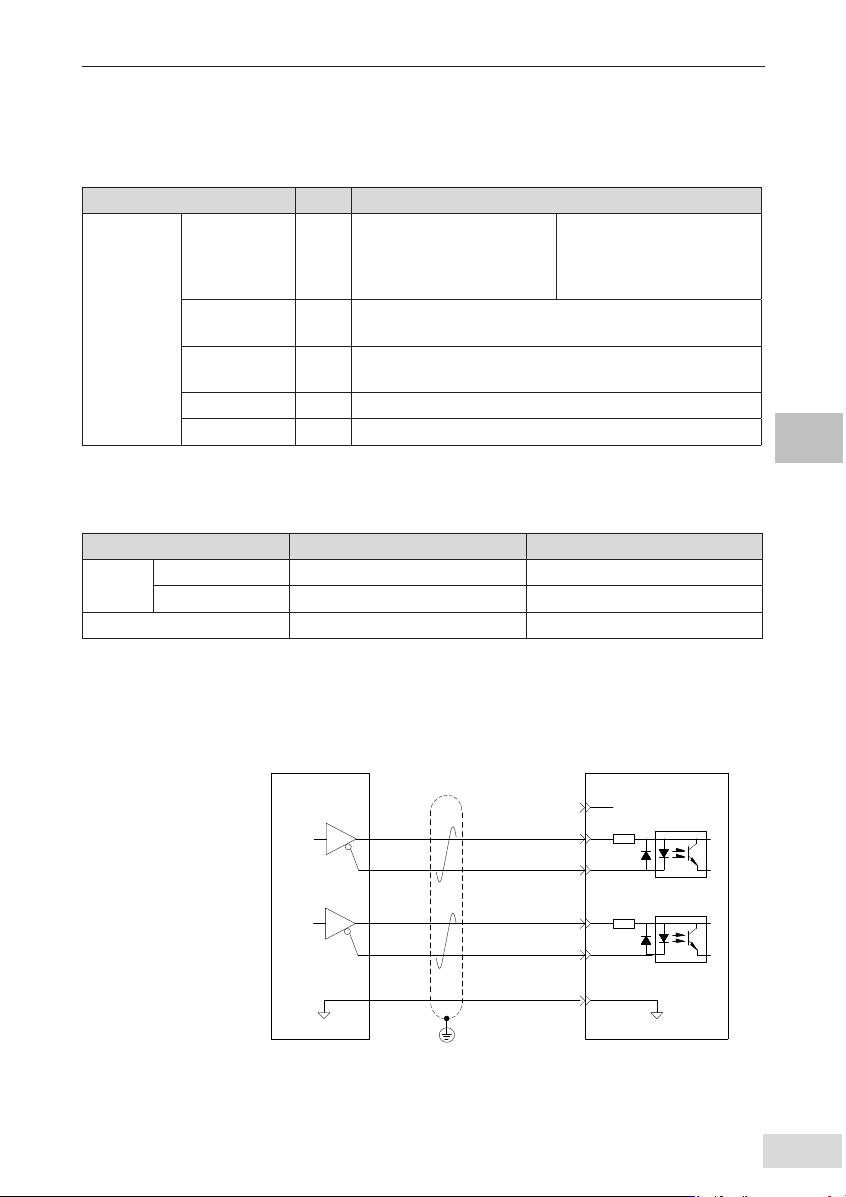
1) 低速脉冲指令输入
a) 当为差分方式时
PULSE+
PULSE-
35
41
43
240Ω
SIGN+
SIGN-
37
39
240Ω
伺服驱动器
29
GND
GND
上位装置
低速脉冲位置指令
最小脉冲宽度
最大输入频率为
500
1us
pps
k