IS620P系列伺服用户手册.pdf - 第48页
3 第 3 章 伺服驱动器与电机的连接说明 IS620P 系列伺服用户手册简易版 - 48 - b ) 当为集电极开路方式时 ① 使用伺服驱动器内部 24V 电源时: PULSE+ PULSE- 35 41 43 240 Ω 2.4k Ω SIGN+ SIGN- 37 39 240 Ω 2.4k Ω 伺服驱动器 14 COM- 上位装置 24V 17 +24V 电源 PULLHI 集电极开路脉冲位置指令 最小脉冲宽度 最大输入频率为 2…
3
IS620P
系列伺服用户手册简易版 第
3
章 伺服驱动器与电机的连接说明
- 47 -
3.3.1 位置指令输入信号
下面就用户接口连接器的普通指令脉冲输入、指令符号输入信号及高速指令脉冲输入、指令符号
输入信号端子进行说明。
表 3-18 位置指令输入信号说明
信号名 针脚号 功能
位置指令
PULSE+
PULSE-
SIGN+
SIGN-
41
43
37
39
低速脉冲指令输入方式:
差分驱动输入
集电极开路
输入脉冲形态:
方向 + 脉冲
A、B 相正交脉冲
CW/CCW 脉冲
HPULSE+
HPULSE-
38
36
高速输入脉冲指令
HSIGN+
HSIGN-
42
40
高速位置指令符号
PULLHI 35 指令脉冲的外加电源输入接口
GND 29 信号地
上位装置侧指令脉冲及符号输出电路,可以从差分驱动器输出或集电极开路输出 2 种中选择。其
最大输入频率及最小脉宽如下表所示:
表 3-19 脉冲输入频率与脉宽对应关系
脉冲方式 最大频率 (pps) 最小脉宽 (us)
普通
差分 500k 1
集电极开路 200k 2.5
高速差分 4M 0.125
■ 上级装置输出脉冲宽度若小于最小脉宽值,会导致驱动器接收脉冲错误。
注:
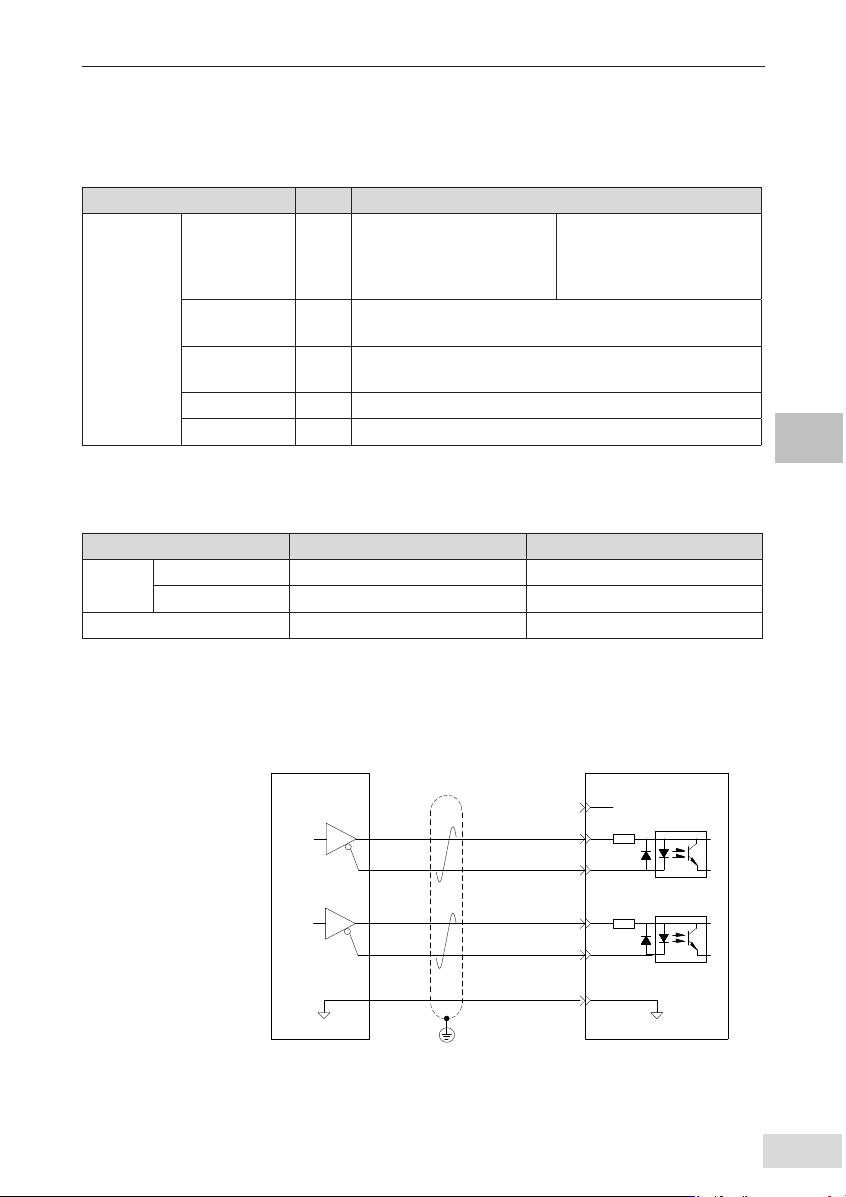
1) 低速脉冲指令输入
a) 当为差分方式时
PULSE+
PULSE-
35
41
43
240Ω
SIGN+
SIGN-
37
39
240Ω
伺服驱动器
29
GND
GND
上位装置
低速脉冲位置指令
最小脉冲宽度
最大输入频率为
500
1us
pps
k
3
第
3
章 伺服驱动器与电机的连接说明
IS620P
系列伺服用户手册简易版
- 48 -
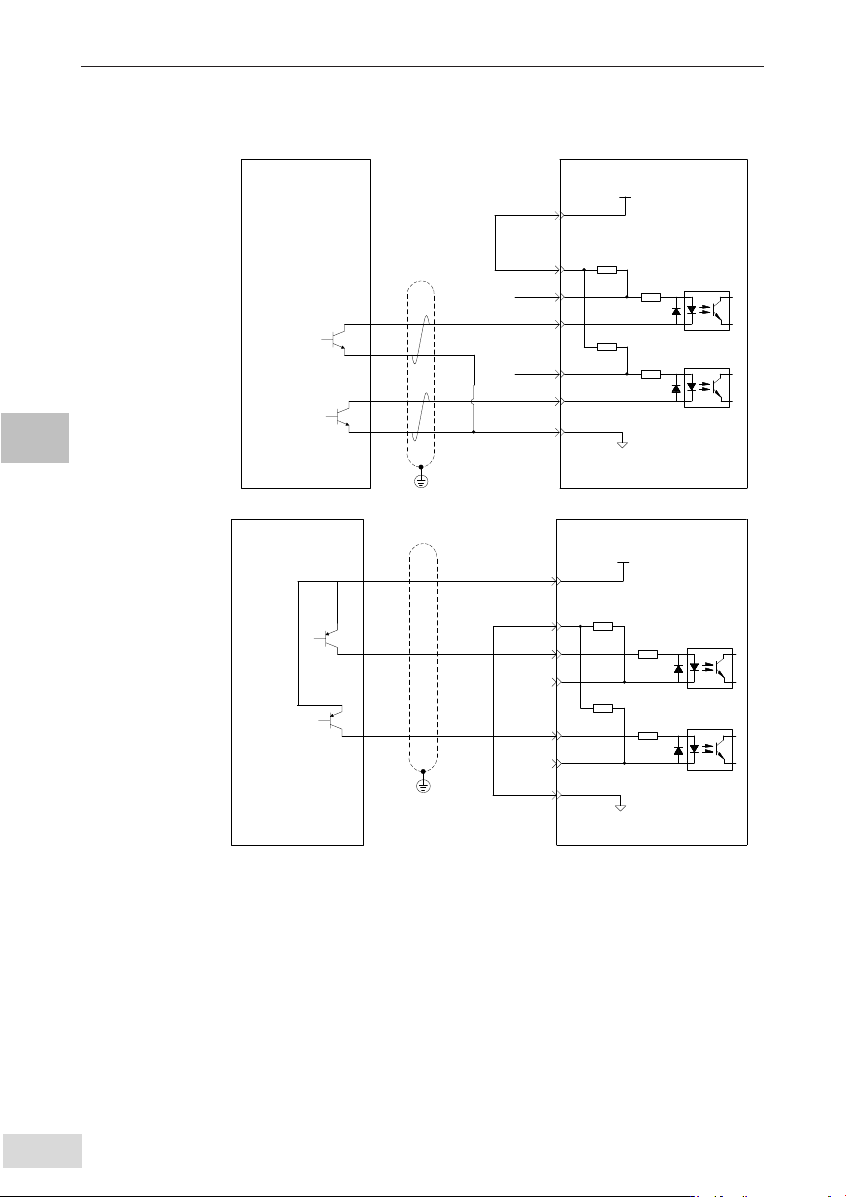
b) 当为集电极开路方式时
① 使用伺服驱动器内部 24V 电源时:
PULSE+
PULSE-
35
41
43
240Ω
2.4kΩ
SIGN+
SIGN-
37
39
240Ω
2.4kΩ
伺服驱动器
14
COM-
上位装置
24V
17
+24V电源
PULLHI
集电极开路脉冲位置指令
最小脉冲宽度
最大输入频率为
200
2.5 us
kpps
PULSE+
35
41
43
240Ω
SIGN+
37
39
240Ω
伺服驱动器
14
上位装置
24V
17
PULLHI
2.4kΩ
2.4kΩ
COM-
3
IS620P
系列伺服用户手册简易版 第
3
章 伺服驱动器与电机的连接说明
- 49 -
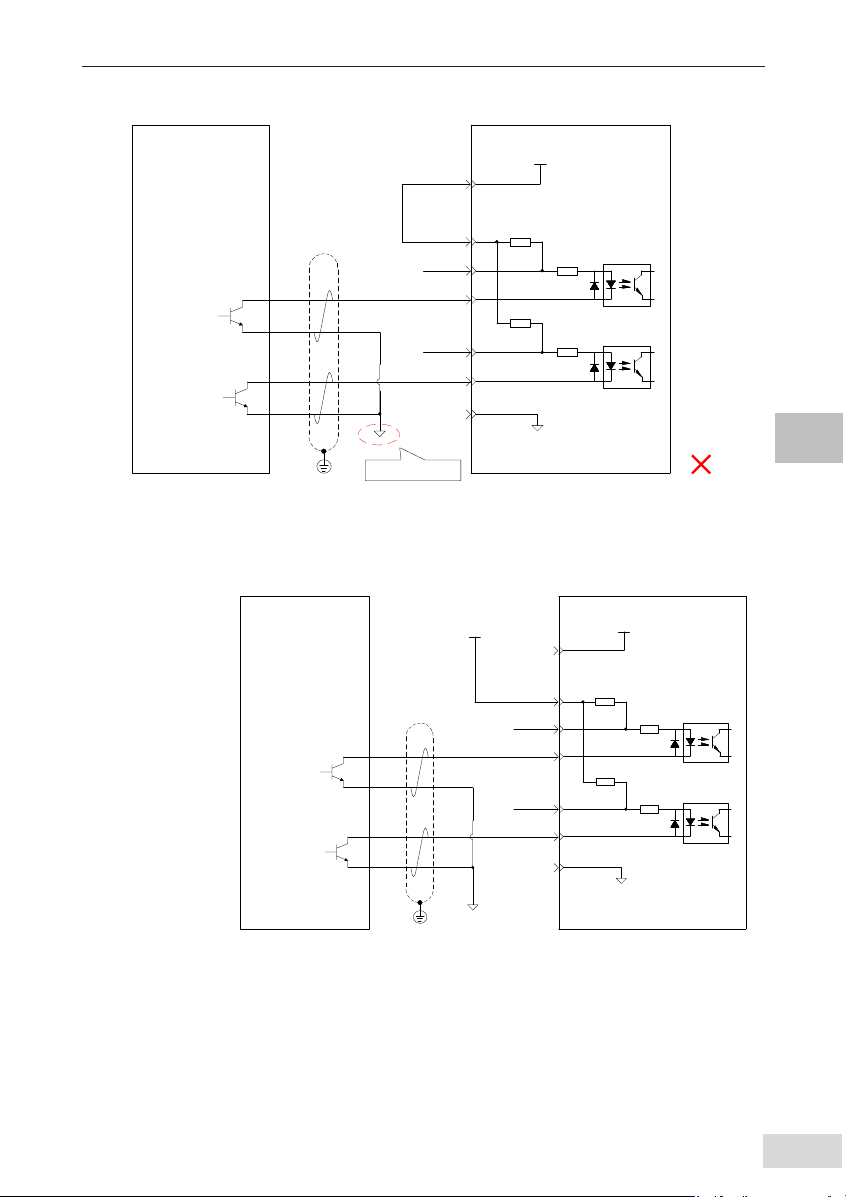
■ 错误:未接 14 引脚 COM-,无法形成闭合回路
PULSE+
PULSE-
35
41
43
240Ω
2.4kΩ
SIGN+
SIGN-
37
39
240Ω
2.4kΩ
伺服驱动器
14
COM-
上位装置
24V
17
+24V电源
PULLHI
未接14号引脚COM-
② 使用外部电源时:
方案一:使用驱动器内部电阻 ( 推荐方案 )
PULSE+
PULSE-
35
41
43
240Ω
2.4kΩ
SIGN+
SIGN-
37
39
240Ω
2.4kΩ
伺服驱动器
14
上位装置
24V
17
PULLHI
外部+24Vdc
外部 0V
集电极开路脉冲位置指令
最小脉冲宽度
最大输入频率为
200
2.5 us
kpps