IS620P系列伺服用户手册.pdf - 第64页
3 第 3 章 伺服驱动器与电机的连接说明 IS620P 系列伺服用户手册简易版 - 64 - 件才被设为 OFF : H02-12 时间未到,但电机已减速至 H02-1 1 ; H02-12 时间已到,但电机转速仍高于 H02-1 1 。 ■ 抱闸输出由 ON 变为 OFF 后,在 50ms 时间内,电机仍然处于通电状态,防止机械运动部由于自重 或外力作用移动。 ON OFF OFF 伺服使能 (S-ON) 抱闸输出 (BK) OFF…
3
IS620P
系列伺服用户手册简易版 第
3
章 伺服驱动器与电机的连接说明
- 63 -
ON
OFF OFF
伺服使能
(S-ON)
抱闸输出
(BK)
OFF OFF
H02-09
位置/速度/
转矩指令
电机速度
H02-10
ON
OFF OFF
电机通电
ON
*1
OFF(抱闸有效)
OFF
抱闸接触部
*2
*2
*3
*4
ON(抱闸无效)
零速停机
OFF
ON
OFF
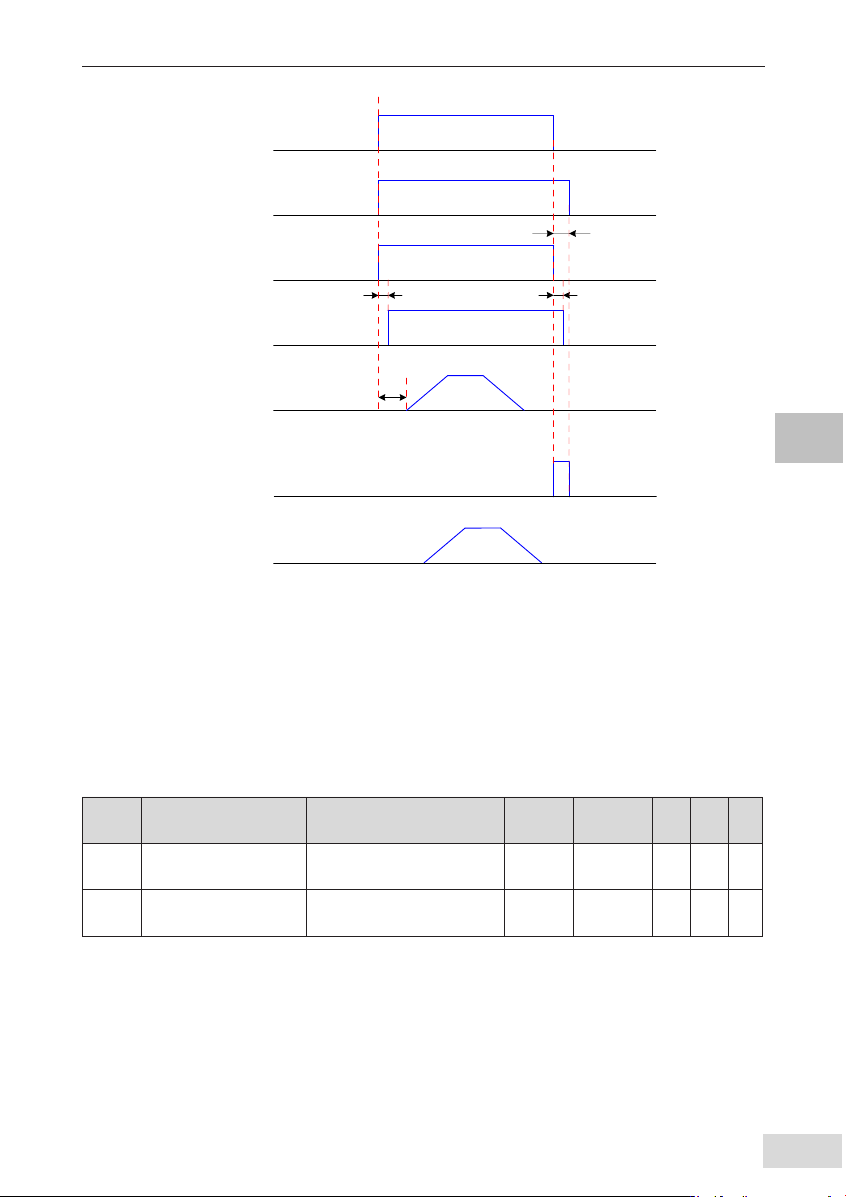
图 3-16 电机静止时抱闸时序图
注释:
*1、伺服使能 ON 时,抱闸输出被置为 ON,同时电机进入通电状态;
*2、抱闸接触部动作的延迟时间请参考电机相关规格,详见第 2 章;
*3、从抱闸输出设为 ON 到输入指令,请间隔 H02-09 时间以上;
*4、伺服电机静止情况 ( 电机转速低于 20rpm) 下,伺服使能 OFF 时,抱闸输出同时被置为
OFF,通过 H02-10 可以设定抱闸输出 OFF 后,电机进入非通电状态的延时。
☆关联功能码:
功能码 名称 设定范围 单位 出厂设定
生效
时间
设定
方式
相关
模式
H02-09
抱闸输出 ON 至指令
接收延时
0~500 ms 250
立即
生效
运行
设定
PS
H02-10
静止状态 , 抱闸输出
OFF 至电机不通电延时
1~1000 ms 150
立即
生效
运行
设定
PS
② 伺服电机旋转时的抱闸时序
伺服使能由 ON 转为 OFF 时,若当前电机速度大于等于 20rpm,则驱动器按旋转抱闸时序动作。
注意:
■ 伺服使能由 OFF 置为 ON 时,在 H02-09 时间内,请勿输入位置 / 速度 / 转矩指令,否则会造成指令
丢失或运行错误;
■ 伺服电机旋转时,发生伺服使能 OFF,伺服电机进入零速停机状态,但抱闸输出需满足以下任一条
3
第
3
章 伺服驱动器与电机的连接说明
IS620P
系列伺服用户手册简易版
- 64 -
件才被设为 OFF:
H02-12 时间未到,但电机已减速至 H02-11;
H02-12 时间已到,但电机转速仍高于 H02-11。
■ 抱闸输出由 ON 变为 OFF 后,在 50ms 时间内,电机仍然处于通电状态,防止机械运动部由于自重
或外力作用移动。
ON
OFF
OFF
伺服使能
(S-ON)
抱闸输出
(BK)
OFF OFF
H02-09
位置/速度/
转矩指令
电机速度
ON
OFF
OFF
电机通电
ON
*1
OFF(抱闸有效)
OFF
抱闸接触部
*2
*4
*3
ON(抱闸无效)
H02-12
*2
H02-11
*4
零速停机
50ms
OFF
ON
OFF
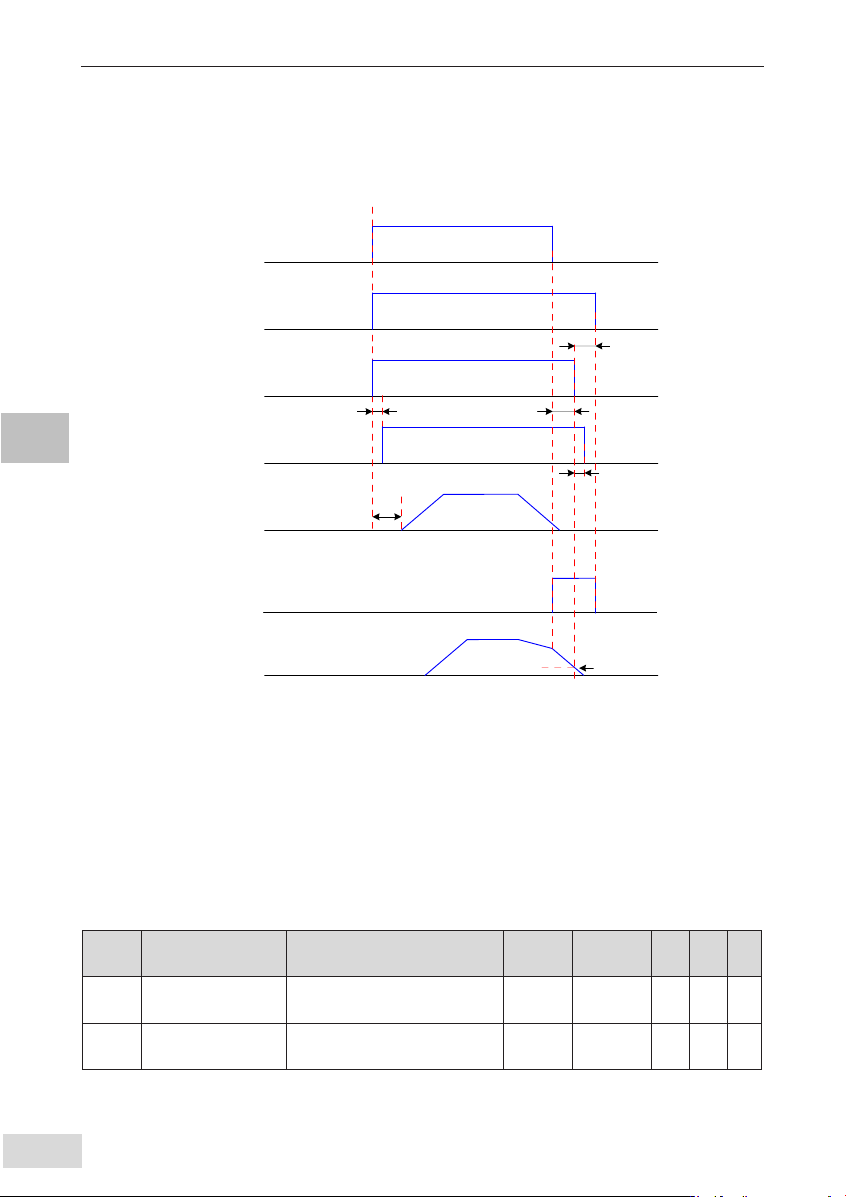
图 3-17 电机旋转时抱闸时序图
注释:
*1、伺服使能 ON 时,抱闸输出被置为 ON,同时电机进入通电状态;
*2、抱闸接触部动作的延迟时间请参考电机相关规格,详见第 2 章。
*3、从抱闸输出设为 ON 到输入指令,请间隔 H02-09 时间以上。
*4、伺服电机旋转情况下,伺服使能 OFF 时,通过 H02-11 和 H02-12 可以设定伺服使能
OFF 后,抱闸输出 OFF 的延时,在抱闸输出 OFF 后再延时 50ms,电机才进入非通电状态。
☆关联功能码:
功能码 名称 设定范围 单位 出厂设定
设定
方式
生效
时间
相关
模式
H02-11
旋转状态,抱闸输出
OFF 时转速阈值
0~3000 rpm 30
运行
设定
立即
生效
PS
H02-12
旋转状态,抱闸输出
OFF 延时
1~1000 ms 500
运行
设定
立即
生效
PS
3
IS620P
系列伺服用户手册简易版 第
3
章 伺服驱动器与电机的连接说明
- 65 -
c) 伺服驱动器故障状态抱闸时序
伺服故障按照停机方式的不同,分为第 1 类故障 ( 简称:NO.1) 和第 2 类故障 ( 简称:
NO.2),请查看第 6 章。伺服驱动器故障状态抱闸时序可分为以下 2 种情况:
① 发生第 1 类故障:
抱闸 DO 输出条件与“伺服驱动器正常状态下,伺服电机旋转时的抱闸时序”相同。即:
抱闸输出需满足以下任一条件才被设为 OFF:
● H02-12 时间未到,但电机已减速至 H02-11;
● H02-12 时间已到,但电机转速仍高于 H02-11。
② 发生第 2 类故障:
发生第 2 类故障且使能抱闸时,第 2 类故障停机方式被强制为“零速停机,自由运行状态”。
此时,伺服电机首先进行零速停机,当电机实际转速低于 20rpm 时,抱闸 DO 输出条件与“伺
服驱动器正常状态下,伺服电机静止时的抱闸时序”相同,即:抱闸输出立刻变为 OFF,但
在 H02-10 时间内,电机仍然处于通电状态。
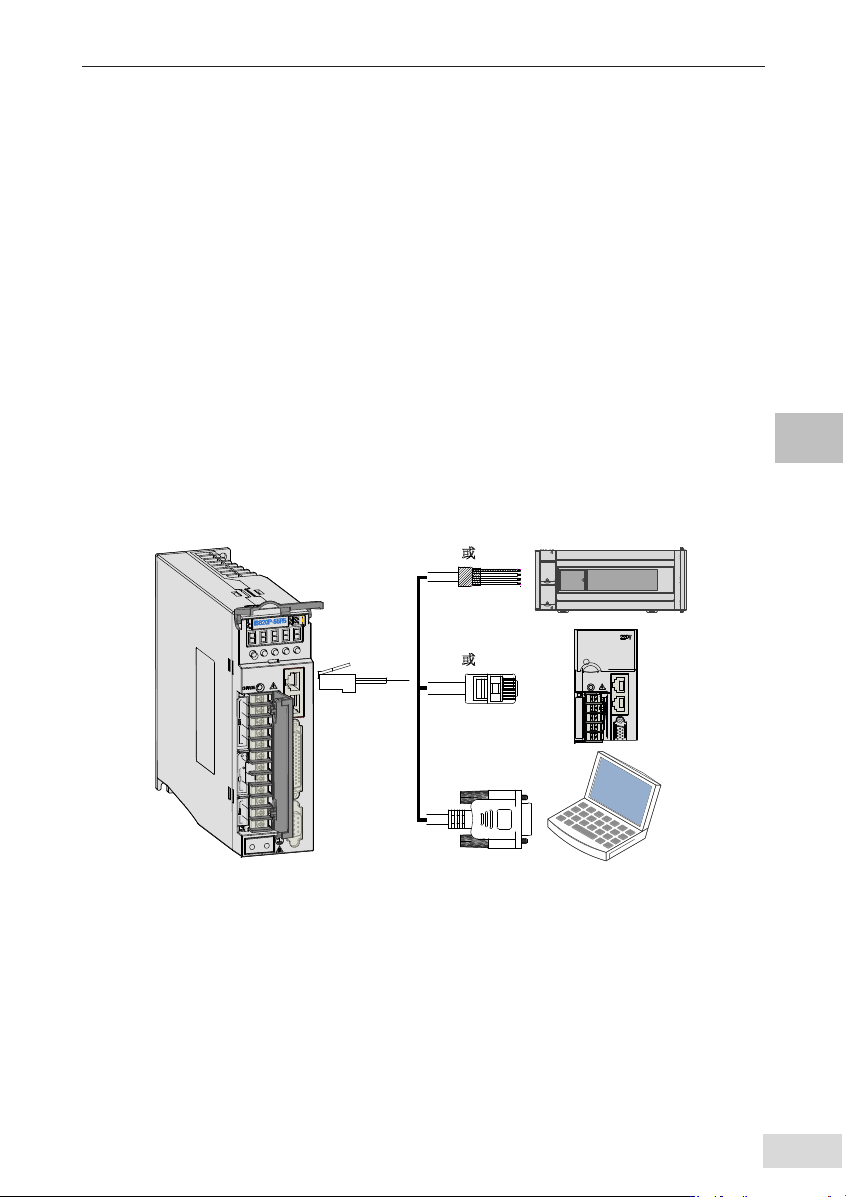
3.4 通信信号配线
L1C
L2C
R
S
T
-
P
+
D
C
U
V
W
CN3
CN4
CN1
CN2
CAN或RS485
CAN或
RS485
RS232
图 3-18 通信配线示意图
通信信号连接器 (CN3、CN4) 为内部并联的两个同样的通信信号连接器。请勿将线接到“保留”端子。