IS620P系列伺服用户手册.pdf - 第76页
4 第 4 章 运行模式与调试方法 IS620P 系列伺服用户手册简易版 - 76 - 第 4 章 运行模式与调试方法 按照伺服驱动器的命令方式与运行特点,可分为三种运行模式,即位置控制运行模式、速度控制 运行模式、转矩控制运行模式等。 位置控制模式一般是通过脉冲的个数来确定移动的位移,外部输入的脉冲频率确定转动速度的大 小。由于位置模式可以对速度和位置严格控制,所以一般应用于定位装置。是伺服应用最多的控 制模式,主要用于机械手、贴片机…
3
IS620P
系列伺服用户手册简易版 第
3
章 伺服驱动器与电机的连接说明
- 75 -
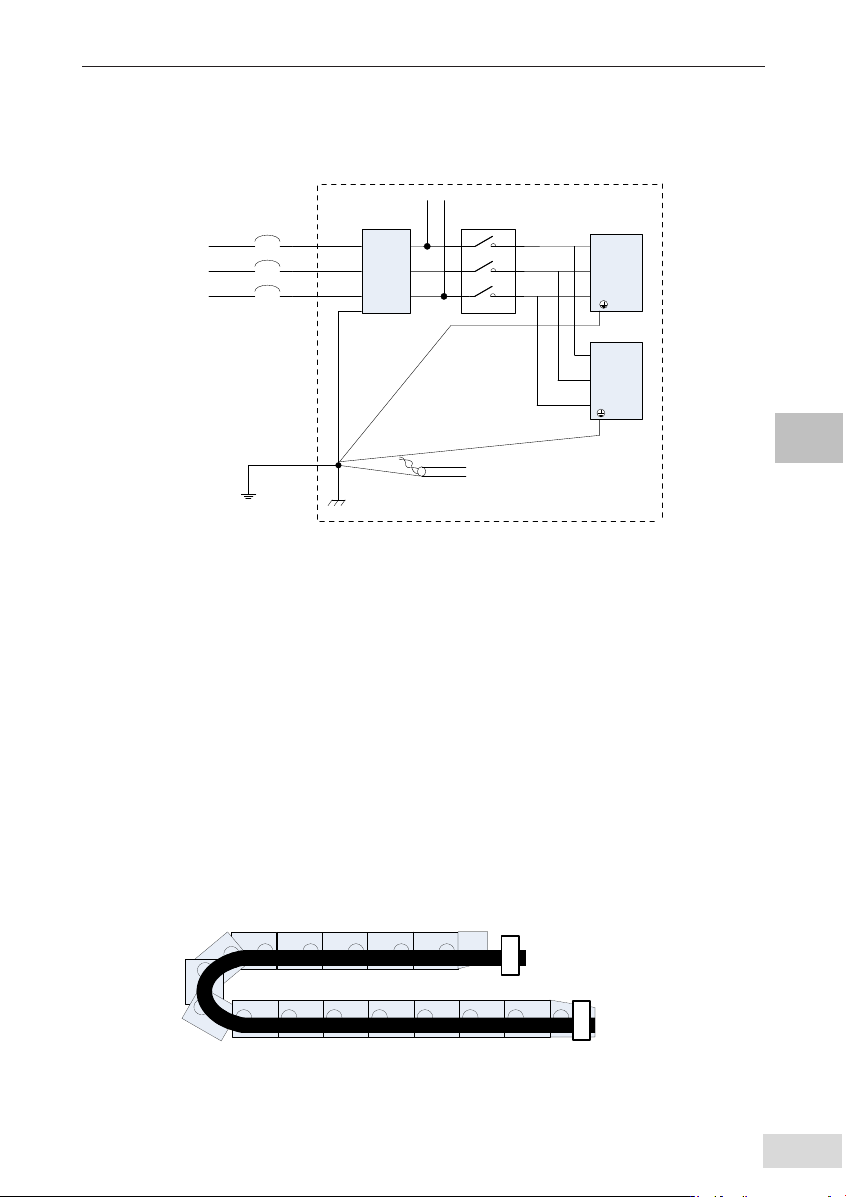
4) 安装于控制柜内的噪音滤波器地线处理
当噪音滤波器与伺服驱动器安装在一个控制柜内时,建议将滤波器与伺服驱动器固定在同一
金属板上,保证接触部分导电且搭接良好,并对金属板进行接地处理。或参考图 3-28 所示
单独接地。
噪音
滤波器
L1C L2C
R
S
T
交
流
电
源
屏蔽接地
伺服驱
动器
伺服驱
动器
接地
图 3-34 噪音滤波器地线处理示意图
3.7 线缆使用的注意事项
1. 请勿使电缆弯曲或承受张力。因信号用电缆的芯线直径只有 0.2mm 或 0.3mm,容易折断,使
用时请注意。
2. 需移动线缆时,请使用柔性电缆线,普通电缆线容易在长期弯折后损坏。小功率电机自带线缆
不能用于线缆移动场合。
3. 使用线缆保护链时请确保:
● 电缆的弯曲半径在电缆外径的 10 倍以上;
● 电缆保护链内的配线请勿进行固定或者捆束,只能在电缆保护链的不可动的两个末端进
行捆束固定;
● 勿使电缆缠绕、扭曲;
● 电缆保护链内的占空系数确保在 60% 以下;
● 外形差异太大的电缆请勿混同配线,防粗线将细线压断,如果一定要混同配线请在线缆
中间设置隔板装置。
电缆端末部分
电缆拖链
电缆
图 3-35 线缆保护链示意图
4
第
4
章
运行模式与调试方法
IS620P
系列伺服用户手册简易版
- 76 -
第 4 章 运行模式与调试方法
按照伺服驱动器的命令方式与运行特点,可分为三种运行模式,即位置控制运行模式、速度控制
运行模式、转矩控制运行模式等。
位置控制模式一般是通过脉冲的个数来确定移动的位移,外部输入的脉冲频率确定转动速度的大
小。由于位置模式可以对速度和位置严格控制,所以一般应用于定位装置。是伺服应用最多的控
制模式,主要用于机械手、贴片机、雕铣雕刻、数控机床等。
速度模式是通过模拟量输入或数字量给定、通讯给定控制转动速度,主要应于一些恒速场合。如
模拟量雕铣机应用,上位机采用位置控制,伺服驱动器采用速度控制模式。
转矩控制方式是通过即时改变模拟量的设定或以通讯方式改变对应的地址数值来改变设定的力矩
大小。主要应用在对材质的受力有严格要求的缠绕和放卷的装置中,例如绕线装置或拉光纤设备
等一些张力控制场合,转矩的设定要根据缠绕半径的变化随时更改,以确保材质的受力不会随着
缠绕半径的变化而改变。
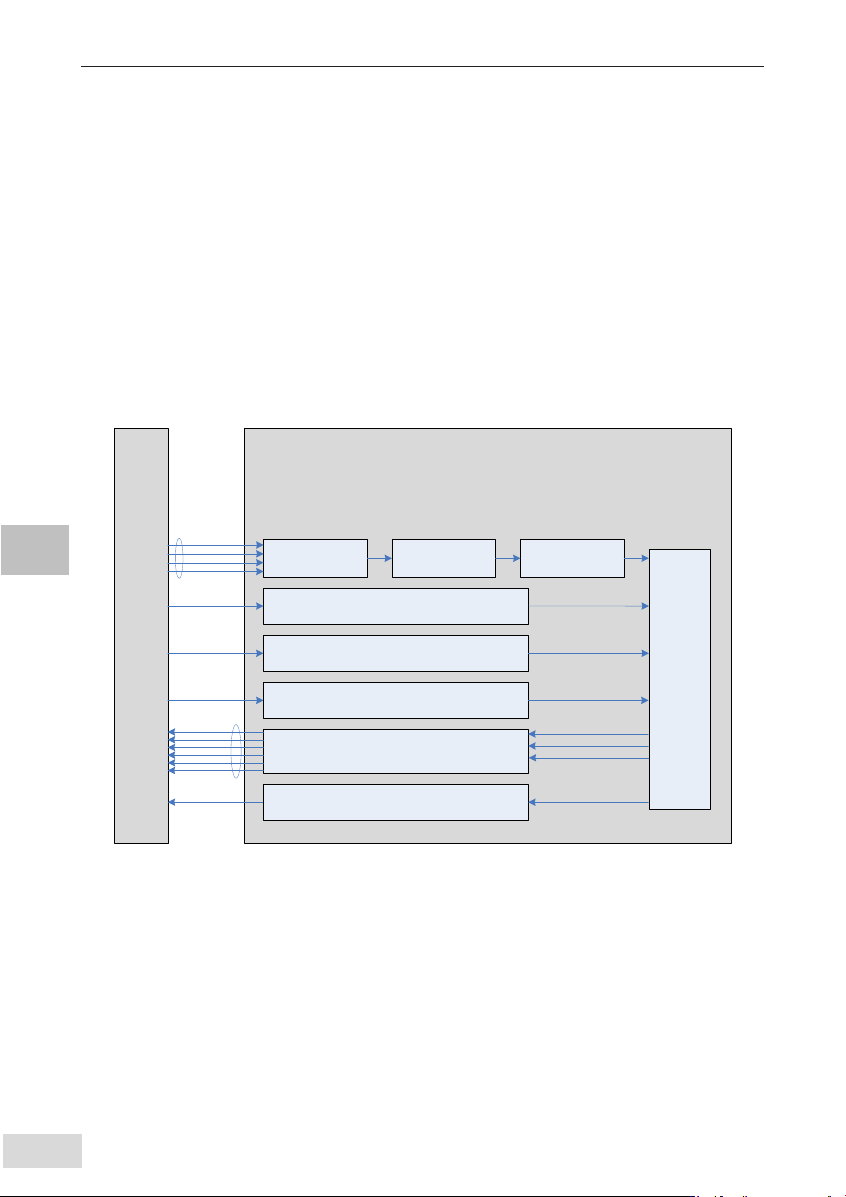
4.1 位置模式使用说明
指令输入设置
位置调节
控制器
上位机
控制器
脉冲输入
H05-00 指令来源
H05-01 高速指令
H05-15 指令形态
H05-07 齿轮比1分子
H05-09 齿轮比1分母
H05-11 齿轮比2分子
H05-13 齿轮比2分母
H05-02
电机一圈的指令脉冲数
H05-04 低通滤波
H05-06 均值滤波
H05-20 完成输出条件
H05-21 完成幅度
电子齿轮比 位置指令滤波
指令方向选择功能
POSDirSel输入
INHIBIT输入
分频输出功能
分频脉冲输出
脉冲禁止输入功能
输入
位置偏差清除功能
COIN输出
定位完成
伺服驱动器
H05-17 分频脉冲数
H05-38 同步输出
ClrPosErr
图 4-1 位置控制模式框图
位置模式是伺服驱动器的常见工作模式,其主要使用步骤如下:
1. 正确连接伺服主电路和控制电路的电源,以及电机动力线和编码器线,上电后伺服面板显示
“rdy”即表示伺服电源接线正确,电机编码器接线正确。
2. 通过按键进行伺服 JOG 试运行,确认电机能否正常运行。
3. 参考图 4-2 配线说明连接 CN1 端子中的脉冲方向输入和脉冲指令输入以及必要的 DI/DO 信号,
如伺服使能,定位完成信号等。
4. 进行位置模式的相关设定。根据实际情况设置所用到的 DI/DO,功能码参照 H03/H04 组。此
外根据需要有时还要设置原点复归、分频输出等功能,详见产品综合手册。
5. 使能伺服,通过上位机发出位置指令控制伺服电机旋转。首先使电机低速旋转,并确认旋转方
向及电子齿轮比是否正常,然后进行增益调节,请参考 4.7 节中一般调试步骤。
4
IS620P
系列伺服用户手册简易版 第
4
章 运行模式与调试方法
- 77 -
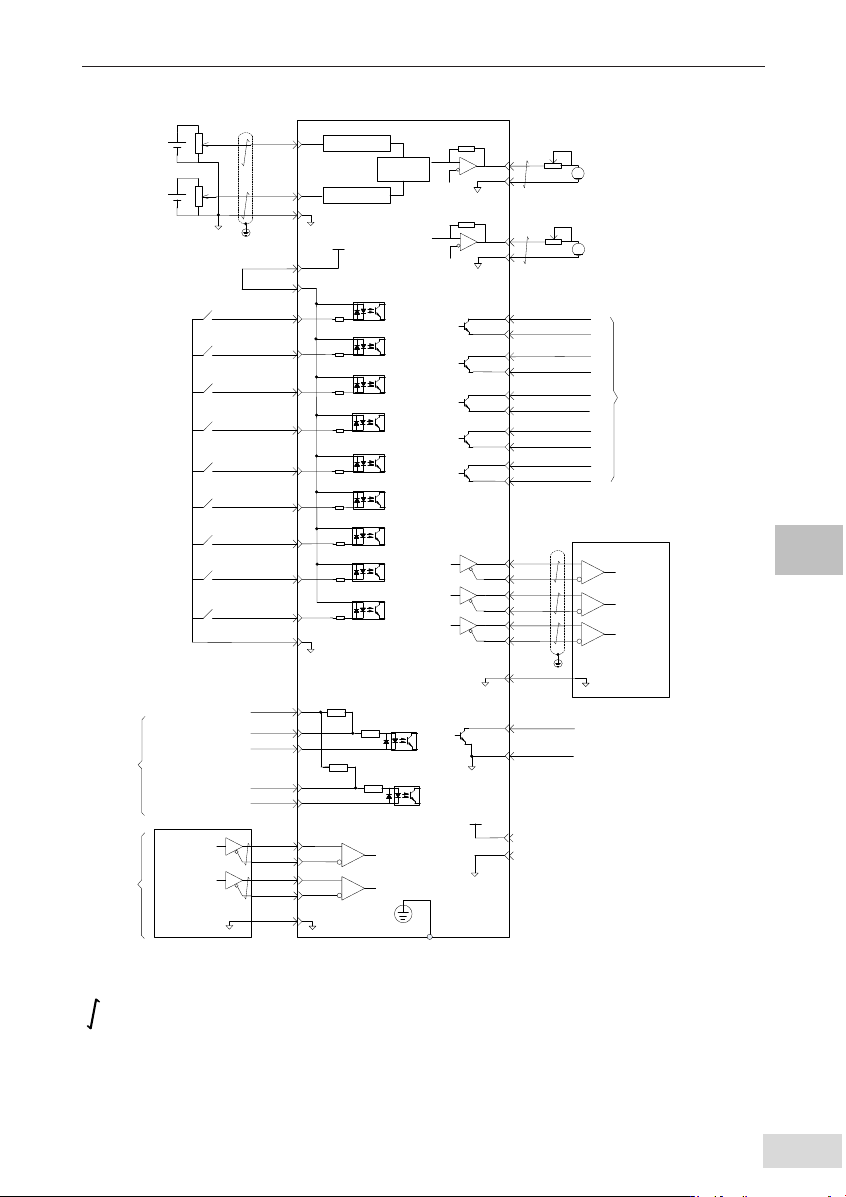
4.1.1 位置模式配线
伺服单元
P-OT(DI1)
PZO-
PAO+
PAO-
PBO+
PBO-
PZO+
ZERO+(DO3+)
编码器分频脉
冲差分输出
21
连接器外壳
PE屏蔽层与连
接器外壳相连
位置指令
PULSE+
PULSE-
PULSE
[CW A相]
35
集电极开路输出时
内部24V电源接口
41
43
低通滤波器
A/D转换
AI2
GND
200Ω
24V
COM-
转矩限制0~10V
输入阻抗约:
9kΩ
低通滤波器
ALM-RST(DI4)
ZCLAMP(DI6)
N-OT(DI2)
S-ON(DI5)
INHIBIT(DI3)
AI1
PULLHI
上述为默认功能,也可通
过功能码配置DI。
22
25
23
13
24
ALM+(DO4+)
HomeAttain+(DO5+)
GND
44
29
PZ-OUT
4.7kΩ
4.7kΩ
4.7kΩ
4.7kΩ
4.7kΩ
4.7kΩ
COM+
S-RDY+(DO1+)
COIN+(DO2+)
用户自备:DC5V~24V
最大允许电压:DC30V
最大允许电流:DC50mA
SIGN+
SIGN-
37
39
200Ω
2.4kΩ
2.4kΩ
SIGN
[CCW B相]
A相输出
B相输出
Z相输出
29
15
GND
+5V
GND
5V
内部+5V电源,最
大允许电流200mA
GND
AO1
A
双向1mA
表头
模拟量输出-10~+10V
最大输出<1mA
内部+24V电源
电压范围:20~28V
最大工作电流:200mA
4.7kΩ
4.7kΩ
4.7kΩ
GAIN-SEL(DI7)
HomeSwitch(DI8)
无定义(DI9)
9
10
34
8
33
32
31
30
12
14
7
6
5
4
3
2
1
26
28
27
S-RDY-(DO1-)
COIN-(DO2-)
ZERO-(DO3-)
ALM-(DO4-)
HomeAttain-(DO5-)
GND
AO2
A
双向1mA
表头
11
20
18
HSIGN+
HSIGN-
HPULSE+
HPULSE-
HPULSE
[CW A相]
HSIGN
[CCW B相]
38
36
42
40
高速脉冲
位置指令
频率范围
0~4MHz
17
模拟量输出-10~+10V
最大输出<1mA
19
GND
转矩限制-10~0V
输入阻抗约:
9kΩ
+24V电源
状态输出
上述为默认功能,也可
通过功能码配置DO。
编码器Z相集电
极开路输出
默认状态下为导通时有效,可
通过功能码修改其正负逻辑
禁止正向驱动
禁止反向驱动
脉冲禁止
警报复位信号
伺服使能
零位固定功能使能
增益切换
原点开关
无定义
GND
GND
29
GND
29
图 4-2 位置模式配线图
表示双绞线。
注:
■
信号线缆与动力线缆一定要分开走线,间隔至少30cm以上;
■
信号线缆因为长度不够进行续接电缆时,一定将屏蔽层可靠连接以保证屏蔽及接地可靠;
■
+5V以GND为参考,+24V以COM为参考。请勿超过最大允许电流,否则驱动器无法正常工作。