IS620P系列伺服用户手册.pdf - 第85页
4 IS620P 系列伺服用户手册简易版 第 4 章 运行模式与调试方法 - 85 - 图 4-7 无偏置 AI2 示意图 图 4-8 偏置后 AI2 示意图 V_Ref AI 速度 电压 +10V 对应速度值 (+H03-80) -10V 对应速度值 (-H03-80) +10V -10V 死区 (H03-58) 电压 偏置 (H03-55) -10V 对应速度值 (-H03-80) 死区 (H03-58) -10V +10V +10…
4
第
4
章
运行模式与调试方法
IS620P
系列伺服用户手册简易版
- 84 -
4.2.2 速度模式相关功能码设定
1) 速度指令输入设置
a) 速度指令来源
速度控制模式下,速度指令有两组来源:来源 A 和来源 B。
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
H06-00 主速度指令 A 来源
0- 数字给定 (H06-03)
1-AI1
2-AI2
- 0
立即
生效
停机
设定
S
H06-01 辅助速度指令 B 来源
0- 数字给定 (H06-03)
1-AI1
2-AI2
3-0( 无作用 )
4-0( 无作用 )
5- 多段速度指令
- 1
立即
生效
停机
设定
S
H06-03 速度指令键盘设定值 -6000~6000 rpm 200
立即
生效
运行
设定
S
H06-04 点动速度设定值 0~6000 rpm 100
立即
生效
运行
设定
S
其中:
● 数字设定,即键盘设定,指通过功能码 H06-03 存储设定的速度值并作为速度指令。
● 模拟速度指令来源,指将外部输入的模拟电压信号转换为控制电机速度的指令信号。
以 AI2 为例说明模拟量设定速度指令方法。
表 4-4 模拟量设定速度指令操作举例
步骤 操作内容 备注
1
设定指令来源为主速度指令 A 中 AI2 来源
H06-00 = 2,H06-02 = 0
设定速度控制下的速度指令来源。
2
调整 AI2 相关参数:
1. 零漂校正
(H03-59 设置或 H0D-10 选择自动校正 )
2. 偏置设置 ( 由 H03-55 设置 )
3. 死区设置 ( 由 H03-58 设置 )
通过零漂、偏置、死区设置,对 AI2 采样进
行调整。
3
H03-80 设定 ±10V 对应速度指令最大 / 最小值,
H03-80 = 3000rpm
指定 +10V 对应的最大转速值 (H03-80)
指定 -10V 对应的最小转速值 (-H03-80)
当 AI2 输入信号中存在干扰时,可以设置 AI2 低通滤波参数 (H03-56),进行滤波处理。
4
IS620P
系列伺服用户手册简易版 第
4
章 运行模式与调试方法
- 85 -
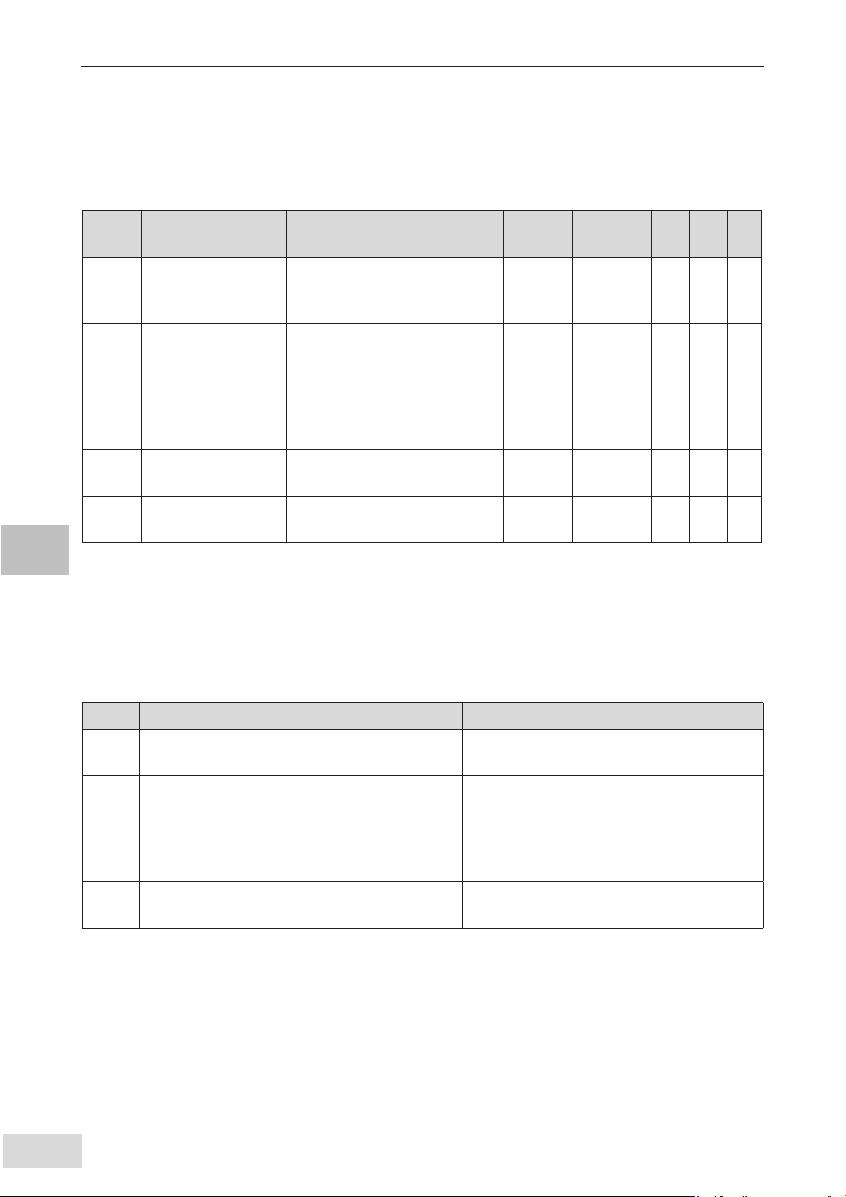
图 4-7 无偏置 AI2 示意图 图 4-8 偏置后 AI2 示意图
V_Ref
AI
速度
电压
+10V对应速度值
(+H03-80)
-10V对应速度值
(-H03-80)
+10V
-10V
死区
(H03-58)
电压
偏置
(H03-55)
-10V对应速度值
(-H03-80)
死区(H03-58)
-10V
+10V
+10V对应速度值
(+H03-80)
速度
(偏置后)
速度
(无偏置)
无偏置速度指令曲线
偏置后速度指令曲线
可通过 H0B-01 查看给定速度指令值。
● 多段速度指令,指用户通过外部 DI 或内部指定的方式选择内部寄存器存储的 16 组速度
指令和相关控制参数。
● 点动速度指令,指用户通过配置两个外部 DI 或上位机控制软件,设置点动运行功能
(FunIN.18、FunIN.19),根据功能码 H06-04 存储的速度值作为点动运行速度,DI 状态
选择速度指令方向。
b) 速度指令方向切换
通过设置功能码 FunIN.26,可使用 DI 控制速度指令的方向切换,满足需要切换方向的情况。
编码 名称 功能名 描述 备注
FunIN.26 SPDDirSel 速度指令方向设定
无效 - 正方向;
有效 - 反方向。
相应端子的逻辑选择,
建议设置为:电平有效。
c) 速度指令选择
速度控制模式具有以下五种速度指令获取方式,通过功能码 H06-02 设定。
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
H06-02 速度指令选择
0- 主速度指令 A 来源
1- 辅助速度指令 B 来源
2-A+B
3-A/B 切换
4- 通讯给定
- 0
立即
生效
停机
设定
S
当速度指令选择“A/B 切换”即功能码 H06-02=3 时,需对 DI 端子单独分配一个功能定义,通过
此输入端子决定当前是 A 指令输入有效或 B 指令输入有效。
编码 名称 功能名 描述 备注
FunIN.4 CMD-SEL 主辅运行指令切换
无效 - 当前运行指令为 A;
有效 - 当前运行指令为 B。
相应端子的逻辑选择,
建议设置为:电平有效。
4
第
4
章
运行模式与调试方法
IS620P
系列伺服用户手册简易版
- 86 -
2) 指令斜坡函数设置
斜坡函数控制功能是指将变化较大的速度指令转换为较为平滑的恒定加减速的速度指令,即通过
设定加减速时间,以达到控制加速和减速目的。在速度控制模式下,若给出的速度指令变化太大
则导致电机出现跳动或剧烈振动现象,若增加软起动的加速和减速时间,则可实现电机的平稳起动,
避免上述情况的发生,造成机械部件损坏。
☆相关功能码:
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
H06-05
速度指令加速斜坡
时间常数
0~65535 ms 0
立即
生效
运行
设定
S
H06-06
速度指令减速斜坡
时间常数
0~65535 ms 0
立即
生效
运行
设定
S
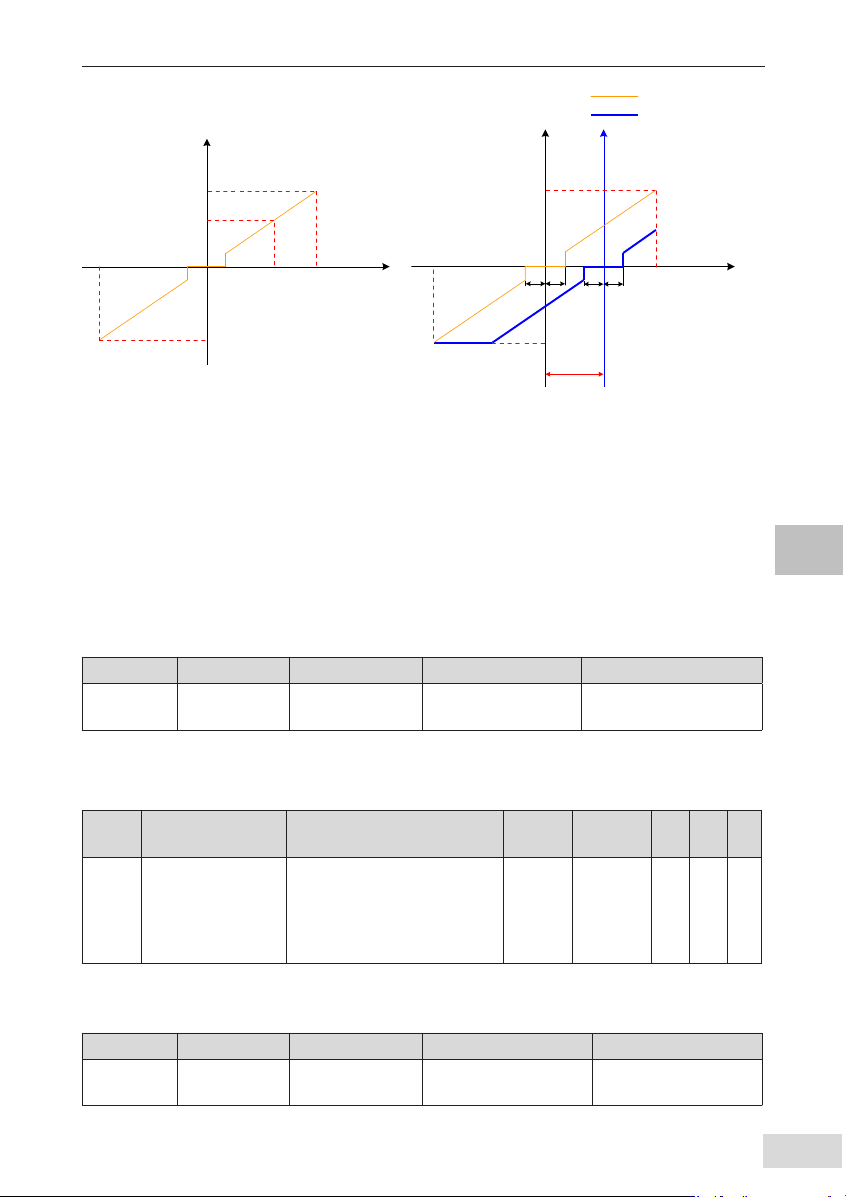
斜坡函数控制功能将阶跃速度指令转换为较为平滑的恒定加减速的速度指令,实现平滑的速度控
制 ( 包括内部设定速度控制 )。
阶跃指令
斜坡函数控制后
1000
H06-05
H06-06
rpm
图 4-9 斜坡函数定义示意图
H06-05:速度指令从零速加速到 1000rpm 所需时间。
H06-06:速度指令从 1000rpm 减速到零速度所需时间。
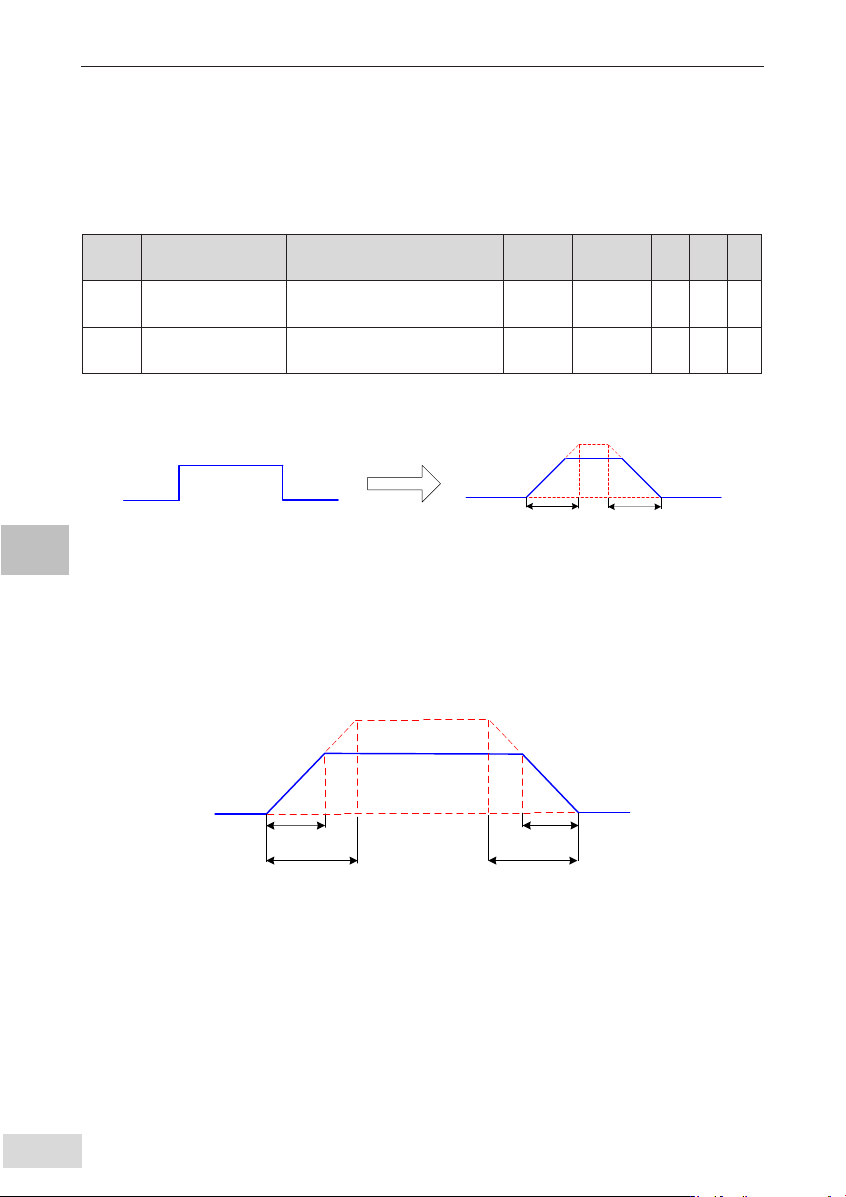
实际的加减速时间计算公式如下:
实际加速时间= ( 速度指令 /1000)×速度指令加速斜坡时间
实际减速时间= ( 速度指令 /1000)×速度指令减速斜坡时间
实际减速时间实际加速时间
1000rpm
电机给定转速
加速斜坡时间
H06-05
减速斜坡时间
H06-06
图 4-10 加减速时间示意图
3) 速度指令限幅限制设置
速度控制模式下,伺服驱动器可以限制速度指令的大小。速度指令限制包括:
● H06-07 设定速度指令的幅度限制,正、负方向的速度指令都不能超过这个数值,否则
将被限定为以该值输出。
● H06-08 设定正向速度限制,正方向速度指令若超过该设定值都将被限定为以该值输出。
● H06-09 设定负向速度限制,负方向速度指令若超过该设定值都将被限定为以该值输出。
● 电机最高转速为默认的限制点,当匹配不同电机时,此参数会随着电机参数而变更。