IS620P系列伺服用户手册.pdf - 第90页
4 第 4 章 运行模式与调试方法 IS620P 系列伺服用户手册简易版 - 90 - 4.3.2 转矩模式相关功能码设定 1 ) 转矩指令输入设置 a ) 转矩指令来源 转矩控制模式下,转矩指令有两组来源:来源 A 和来源 B 。可通过以下两种方式设定: ● 数字设定,即键盘设定。指功能码 H07-03 存储的转矩值与额定转矩的百分比作为转矩 指令。 ● 模拟量指令来源,指将外部输入的模拟电压信号转换为控制电机的转矩指令信号。此时 可…
4
IS620P
系列伺服用户手册简易版 第
4
章 运行模式与调试方法
- 89 -
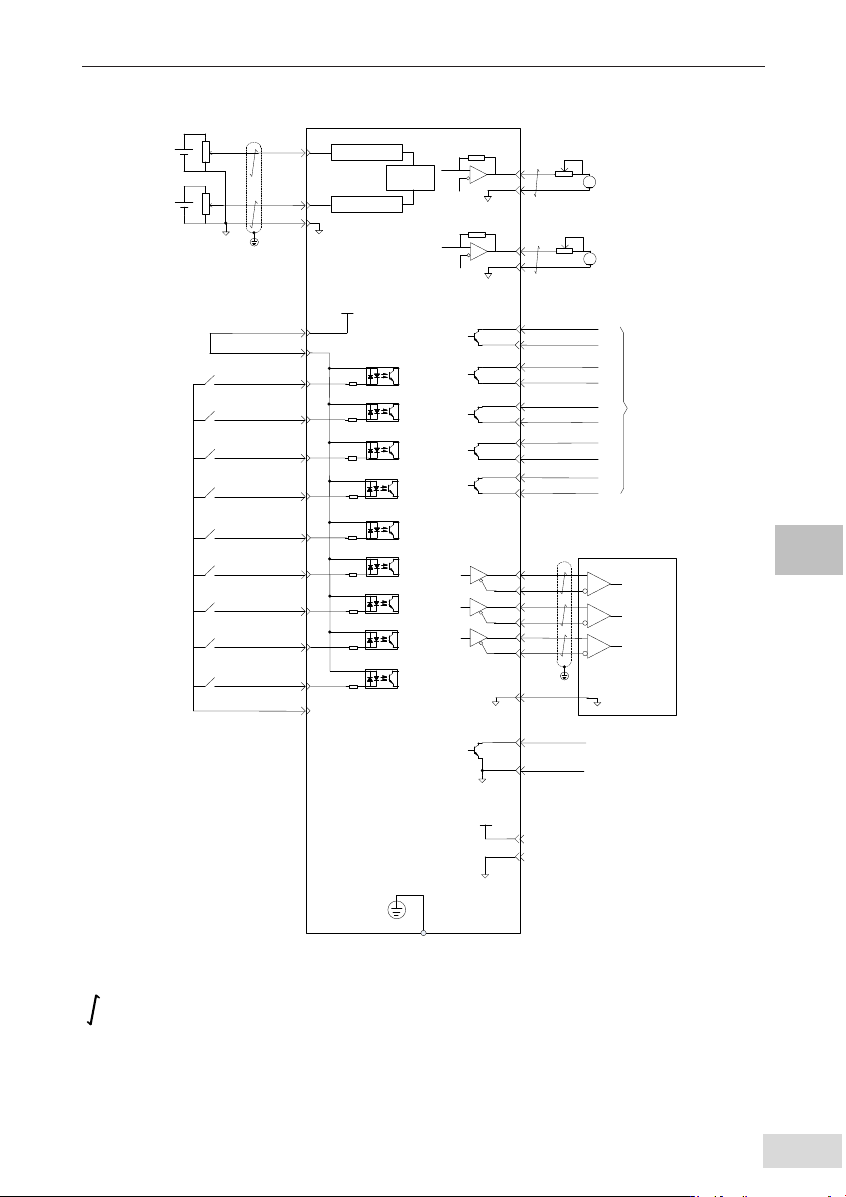
4.3.1 转矩模式配线
伺服单元
P-OT(DI1)
PZO-
PAO+
PAO-
PBO+
PBO-
PZO+
ZERO+(DO3+)
编码器分频脉
冲差分输出
21
连接器外壳
PE屏蔽层与连
接器外壳相连
低通滤波器
A/D转换
AI2
GND
24V
COM-
模拟量转矩
信号输入:±10V
输入阻抗约:9kΩ
低通滤波器
ALM-RST(DI4)
ZCLAMP(DI6)
N-OT(DI2)
S-ON(DI5)
INHIBIT(DI3)
AI1
22
25
23
13
24
ALM+(DO4+)
HomeAttain+(DO5+)
GND
44
29
PZ-OUT
4.7kΩ
4.7kΩ
4.7kΩ
4.7kΩ
4.7kΩ
4.7kΩ
COM+
S-RDY+(DO1+)
COIN+(DO2+)
A相输出
B相输出
Z相输出
29
15
GND
+5V
GND
5V
内部+5V电源,最
大允许电流200mA
GND
AO1
A
双向1mA
表头
模拟量输出-10~+10V
最大输出<1mA
内部+24V电源
电压范围:20~28V
最大工作电流:200mA
4.7kΩ
4.7kΩ
4.7kΩ
GAIN-SEL(DI7)
HomeSwitch(DI8)
无定义(DI9)
9
10
34
8
33
32
31
30
12
14
7
6
5
4
3
2
1
26
28
27
S-RDY-(DO1-)
COIN-(DO2-)
ZERO-(DO3-)
ALM-(DO4-)
HomeAttain-(DO5-)
GND
AO2
A
双向1mA
表头
11
20
18
17
模拟量输出-10~+10V
最大输出<1mA
19
GND
模拟量转速限制
信号输入:±10V
输入阻抗约:9kΩ
+24V电源
上述为默认功能,也
可通过功能码配置DI。
用户自备:DC5V~24V
最大允许电压:DC30V
最大允许电流:DC50mA
状态输出
默认状态下为导通时有效,可
通过功能码修改其正负逻辑
上述为默认功能,也可
通过功能码配置DO。
编码器Z相集
电极开路输出
禁止正向驱动
禁止反向驱动
脉冲禁止
警报复位信号
伺服使能
零位固定功能使能
增益切换
原点开关
无定义
GND
29
图 4-13 转矩模式配线图
表示双绞线。
注:
■
信号线缆与动力线缆一定要分开走线,间隔至少30cm以上;
■
信号线缆因为长度不够进行续接电缆时,一定将屏蔽层可靠连接以保证屏蔽及接地可靠;
■
+5V以GND为参考,+24V以COM为参考。请勿超过最大允许电流,否则驱动器无法正常工作。
4
第
4
章
运行模式与调试方法
IS620P
系列伺服用户手册简易版
- 90 -
4.3.2 转矩模式相关功能码设定
1) 转矩指令输入设置
a) 转矩指令来源
转矩控制模式下,转矩指令有两组来源:来源 A 和来源 B。可通过以下两种方式设定:
● 数字设定,即键盘设定。指功能码 H07-03 存储的转矩值与额定转矩的百分比作为转矩
指令。
● 模拟量指令来源,指将外部输入的模拟电压信号转换为控制电机的转矩指令信号。此时
可以任意指定模拟量和转矩指令的对应关系。
☆相关功能参数:
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
H07-00 主转矩指令 A 来源
0- 数字给定 (H07-03)
1-AI1
2-AI2
- 0
立即
生效
停机
设定
T
H07-01 辅助转矩指令 B 来源
0- 数字给定 (H07-03)
1-AI1
2-AI2
- 1
立即
生效
停机
设定
T
H07-03 转矩指令键盘设定值 -300.0~300.0 % 0
立即
生效
运行
设定
T
b) 转矩指令选择
转矩控制模式具有以下五种转矩指令获取方式,通过功能码 H07-02 设定。
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
H07-02 转矩指令选择
0- 主转矩指令 A 来源
1- 辅助转矩指令 B 来源
2-A+B 来源
3-A/B 切换
4- 通讯给定
- 0
立即
生效
停机
设定
T
c) 转矩指令方向切换
通过设置功能码 FunIN.25,可使用 DI 控制转矩指令的方向切换,满足需要切换方向的情况。
编码 名称 功能名 描述 备注
FunIN.25 TOQDirSel 转矩指令方向设定
无效 - 正方向;
有效 - 反方向。
相应端子的逻辑选择,
建议设置为:电平有效。
当转矩指令选择“A/B 切换”即功能码 H07-02=3 时,需对 DI 端子单独分配一个功能定义。通过
此输入端子选择当前是 A 指令输入有效或 B 指令输入有效。
编码 名称 功能名 描述 备注
FunIN.4 CMD-SEL 主辅运行指令切换
无效 - 当前运行指令为 A;
有效 - 当前运行指令为 B。
相应端子的逻辑选择,
建议设置为:电平有效。
4
IS620P
系列伺服用户手册简易版 第
4
章 运行模式与调试方法
- 91 -
以 AI1 为例说明模拟量设定转矩指令方法。
表 4-5 模拟量设定转矩指令操作举例
步骤 操作内容 备注
1
设定指令来源为辅助转矩指令 B 中的 AI1 来源
H07-02=1,H07-01=1
设定转矩控制下的转矩指令来源。
2
调整 AI1 相关参数:
1. 零漂校正
(H03-54 设置或 H0D-10 选择自动校正 )
2. 偏置设置 ( 由 H03-50 设置 )
3. 死区设置 ( 由 H03-53 设置 )
通过零漂、偏置、死区设置,对 AI1 采样进
行调整。
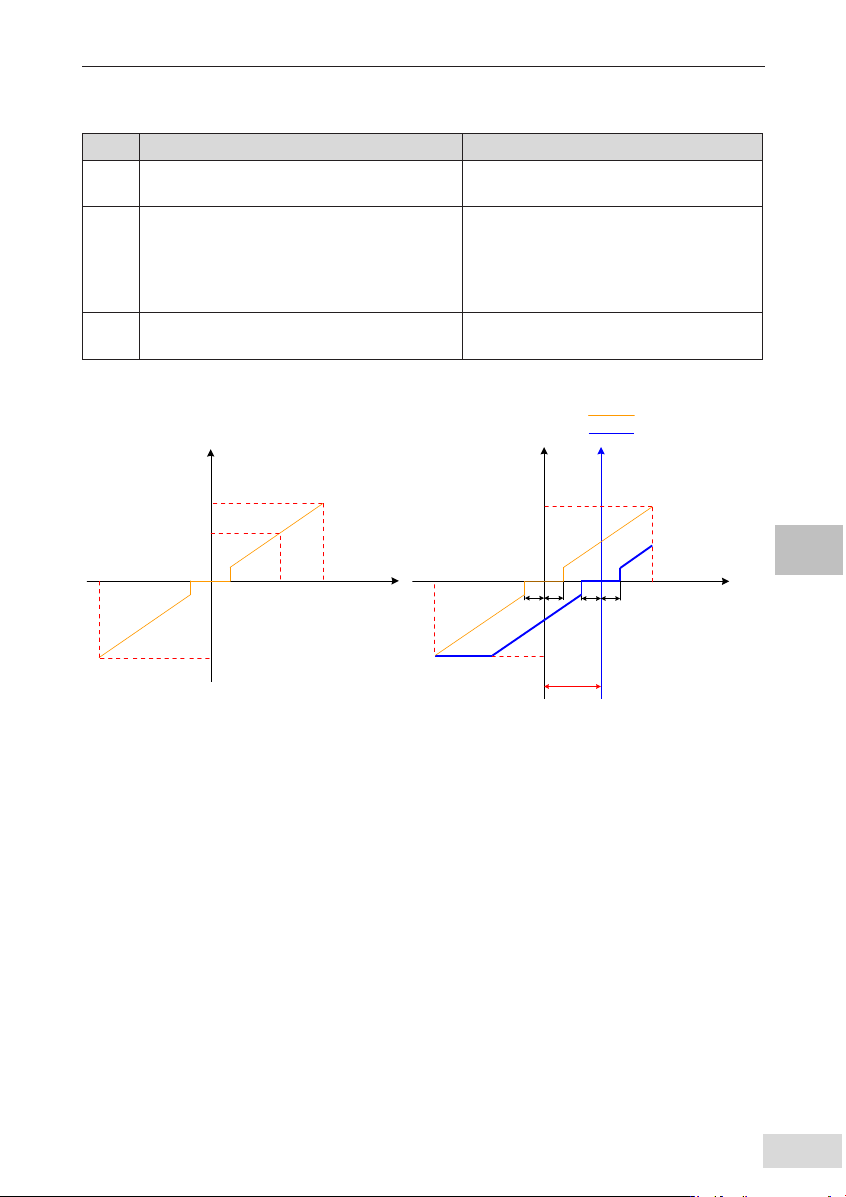
3
H03-81 设定 ±10V 对应转矩最大 / 最小值
H03-81 = 3.00 倍额定转矩
指定 +10V 对应的最大转矩值 (H03-81)
指定 -10V 对应的最小转矩值 (-H03-81)
当 AI1 输入信号中存在干扰时,可以设置 AI1 低通滤波参数 (H03-51),进行滤波处理。
T_Ref
AI
转矩
电压
+10V对应转矩值
(+H03-81)
-10V对应转矩值
(-H03-81)
+10V
-10V
死区
(H03-53)
图 4-14 无偏置 AI1 示意图 图 4-15 偏置后 AI1 示意图
电压
偏置
(H03-50)
-10V对应转矩值
(-H03-81)
死区(H03-53)
-10V
+10V
+10V对应转矩值
(+H03-81)
转矩
(偏置后)
转矩
(无偏置)
无偏置转矩指令曲线
偏置后转矩指令曲线
可通过 H0B-02 查看给定转矩指令 ( 相对于电机额定转矩的百分比 )。
2)转矩模式速度限制功能
在转矩控制模式下,为保护机械需限制伺服电机的转速。转矩控制时,伺服电机仅受控于输出的
转矩指令,不控制转速,因此若设定转矩指令过大,高于机械侧的负载转矩,则电机将一直加速,
可能发生超速现象,此时需设定电机的转速限制值。
超出限制速度范围时,将超速与限制速度的速度差转化为一定比例的转矩,通过负向清除,使速
度向限制速度范围内回归。因此,实际的电机转速限制值,会因负载条件不同而发生波动。可以
通过内部给定或模拟量采样给定方式给定速度限制值。( 同速度控制时的速度指令 )