IS620P系列伺服用户手册.pdf - 第95页
4 IS620P 系列伺服用户手册简易版 第 4 章 运行模式与调试方法 - 95 - 4.4 绝对值系统使用说明 4.4.1 概述 绝对值编码器既检测电机在旋转 1 周内的位置,又对电机旋转圈数进行计数,单圈分辨率 8388608 ( 2 23 ),可记忆 16 位多圈数据。使用绝对值编码器构成的绝对值系统分为绝对位置线 性模式和绝对位置旋转模式,在位置、速度和转矩控制模式下均可使用,驱动器断电时编码器通 过电池备份数据,上电后驱动器…
4
第
4
章
运行模式与调试方法
IS620P
系列伺服用户手册简易版
- 94 -
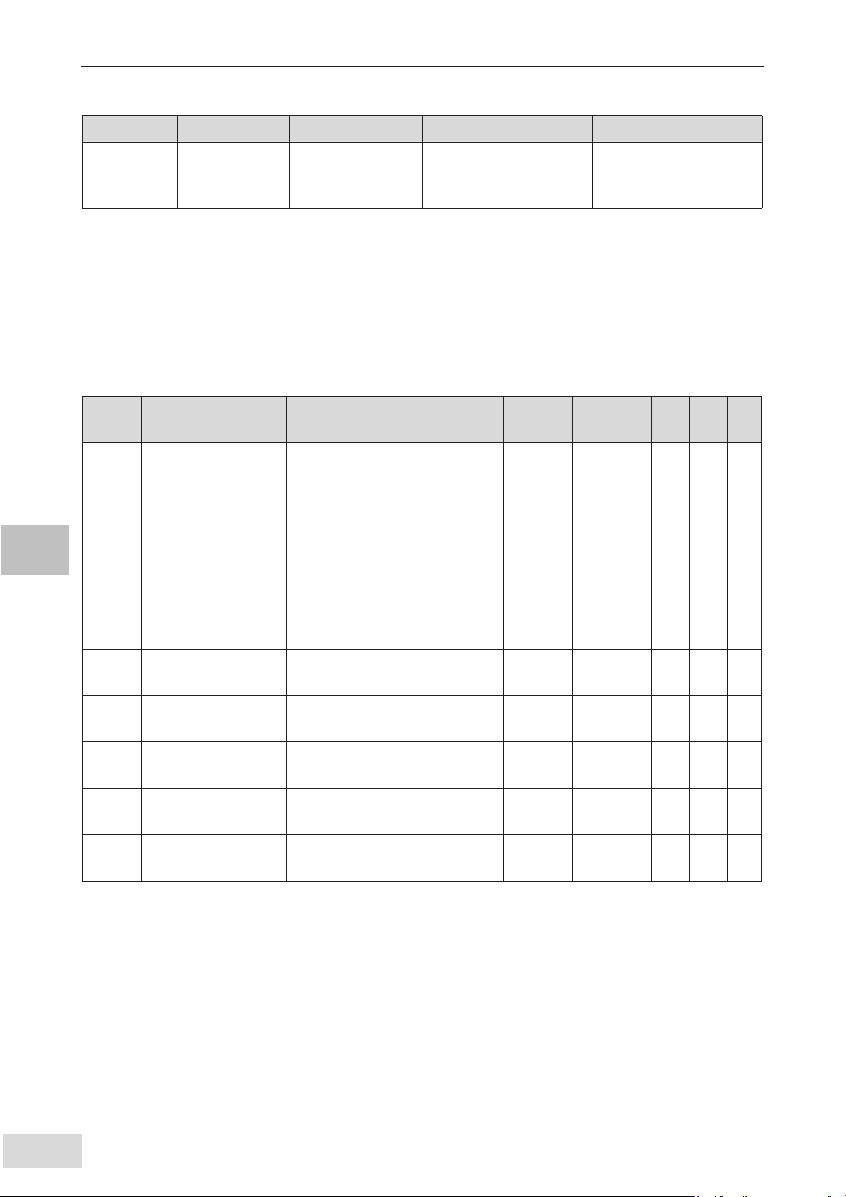
DO 功能选择:输出转矩限制确认信号 C-LT。
编码 名称 功能名 描述 备注
FunOUT.7 C-LT 转矩限制信号
转矩限制的确认信号:
有效 - 电机转矩受限;
无效 - 电机转矩不受限。
-
需设置 DI/DO 相关功能码进行功能和逻辑分配。
如:设置模拟量输入 AI 时,首先通过功能码 H07-08 指定 T_LMT 变量,再设定转矩和模拟量电
压的对应关系。
当 H07-07=1 时,正反转外部转矩限制是利用外部 DI 给定 (P-CL、N-CL) 触发,按照 H07-11、
H07-12 设定的值进行转矩限制。当外部限制和 T_LMT 及其组合限制超过内部限制时,取内部限
制,即所有的限制条件均按最小限制值进行约束转矩控制,使得转矩限制在电机最大转矩范围内。
T_LMT 是对称的,正转时按照 |T_LMT| 值限制,反转时按照 -|T_LMT| 值限制。
功能码 名称 设定范围 单位 出厂设定
生效
方式
设定
方式
相关
模式
H07-07 转矩限制来源
0- 正负内部转矩限制
1- 正负外部转矩限制
( 利用 P-CL,N-CL 选择 )
2-T-LMT 用作外部转矩限制输入
3- 以正负外部转矩和外部
T-LMT 的最小值为转矩限制
( 利用 P-CL,N-CL 选择 )
4- 正负内部转矩限制和 T-LMT
转矩限制之间切换
( 利用 P-CL,N-CL 选择 )
- 0
立即
生效
停机
设定
PST
H07-08 T-LMT 选择
1-AI1
2-AI2
- 2
立即
生效
停机
设定
PST
H07-09 正内部转矩限制
0.0~300.0
(100% 对应一倍额定转矩 )
% 300.0
立即
生效
运行
设定
PST
H07-10 负内部转矩限制
0.0~300.0
(100% 对应一倍额定转矩 )
% 300.0
立即
生效
运行
设定
PST
H07-11 正外部转矩限制
0.0~300.0
(100% 对应一倍额定转矩 )
% 300.0
立即
生效
运行
设定
PST
H07-12 负外部转矩限制
0.0~300.0
(100% 对应一倍额定转矩 )
% 300.0
立即
生效
运行
设定
PST
4
IS620P
系列伺服用户手册简易版 第
4
章 运行模式与调试方法
- 95 -
4.4 绝对值系统使用说明
4.4.1 概述
绝对值编码器既检测电机在旋转 1 周内的位置,又对电机旋转圈数进行计数,单圈分辨率
8388608(2
23
),可记忆 16 位多圈数据。使用绝对值编码器构成的绝对值系统分为绝对位置线
性模式和绝对位置旋转模式,在位置、速度和转矩控制模式下均可使用,驱动器断电时编码器通
过电池备份数据,上电后驱动器通过编码器绝对位置计算机械绝对位置,无需重复进行机械原点
复归操作。
IS620P 系列伺服驱动器匹配绝对值编码器时,需设置电机编号 H00-00=14101(汇川 23 位绝对
值编码器),根据实际应用情况设置 H02-01(绝对值系统选择)。初次接通电池时会发生 Er.731(编
码器电池故障),需设置 H0D-20=1 复位编码器故障,再进行原点复归操作。
注:修改 H02-02( 旋转方向选择 ) 或 H0D-20(绝对编码器复位使能)操作时,编码器绝对位置
会发生突变,导致机械绝对位置基准发生变化,因此需要进行机械原点复归操作。使用驱动器内
部原点复归功能时,原点复归结束驱动器内部会自动计算机械绝对位置与编码器绝对位置偏差,
并存储在驱动器 EEPROM 中。
4.4.2 相关功能码设定
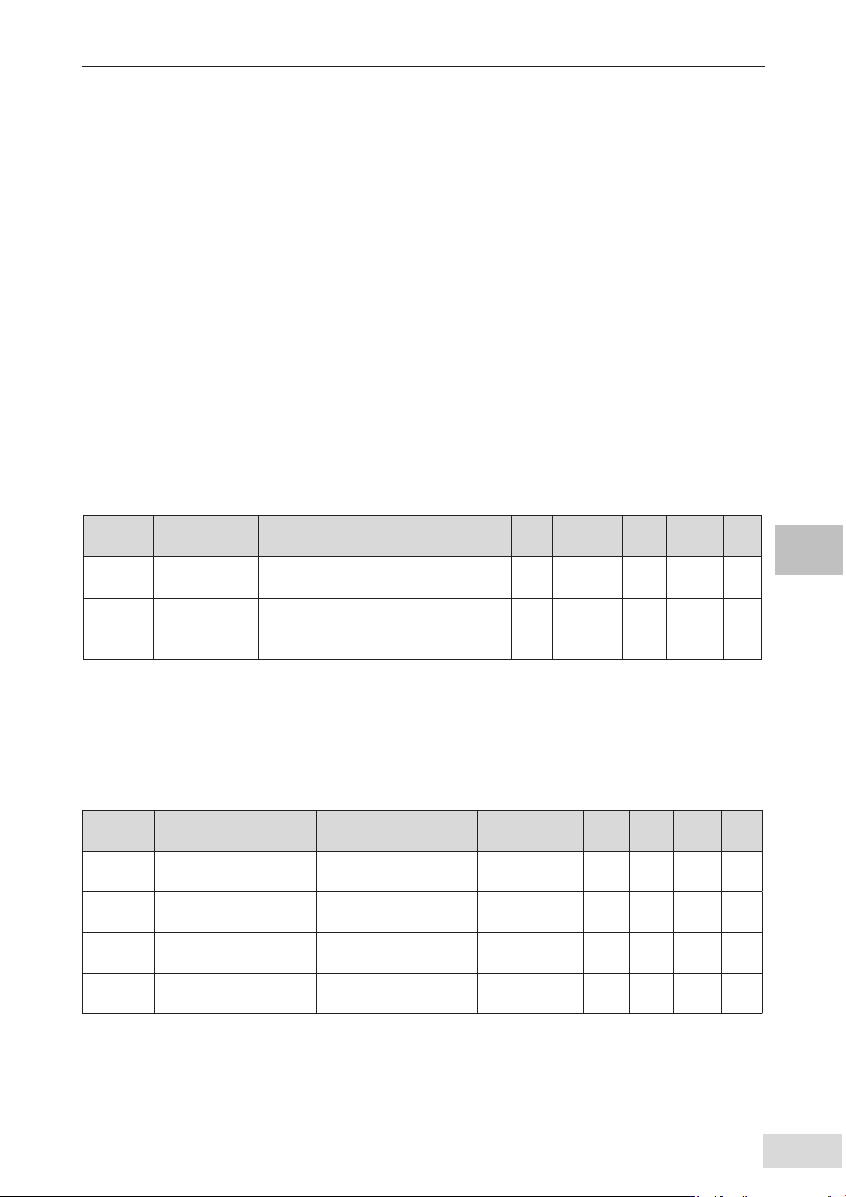
1) 绝对值系统设置
设置 H00-00=14101 选择汇川 23 位绝对值编码器电机,通过 H02-01 选择绝对位置模式。
功能码 名称 设定范围 单位
出厂
设定
生效
时间
类别
相关
模式
H00-00 电机编号
14000- 汇川 20 位增量编码器电机
14101- 汇川 23 位绝对值编码器电机
- 14000
再次
通电
停机
设定
ALL
H02-01
绝对值系统选
择
0- 增量位置模式
1- 绝对位置线性模式
2- 绝对位置旋转模式
- 0
再次
通电
停机
设定
ALL
注:绝对位置模式下,系统自动检测电机编号是否为绝对值编码器电机,如果设置错误发生
Er.122(绝对位置模式产品匹配故障)。
2) 编码器反馈数据
绝对值
编码器反馈数据可分为
编码器旋转圈数数据
和
编码器的 1 圈内位置
,增量位置模式无
编码器旋
转圈数数据
反馈。
功能码 名称 设定范围 单位
出厂
设定
生效
时间
类别
相关
模式
H0B-70
绝对值编码器旋转圈数
数据
- r 0 - 显示 ALL
H0B-71
绝对值编码器的 1 圈内
位置
- 编码器单位 0 - 显示 ALL
H0B-77
绝对值编码器绝对位置
(低 32 位)
- 编码器单位 0 - 显示 ALL
H0B-79
绝对值编码器绝对位置
(高 32 位)
- 编码器单位 0 - 显示 ALL
绝对值编码器旋转圈数数据 H0B-70 是无符号数,范围 0~65535,
假设编码器分辨率 R
E
(R
E
=2
23
),
绝对值编码器的 1 圈内位置 H0B-71 范围 0~
R
E
。
4
第
4
章
运行模式与调试方法
IS620P
系列伺服用户手册简易版
- 96 -
绝对值编码器绝对位置 H0B-79×2
32
+ H0B-77 通过绝对值编码器反馈数据 H0B-70、H0B-71、编
码器分辨率 R
E
计算,当 H0B-70<32768 时(H0B-79×2
32
+ H0B-77)=H0B-70×R
E
+ H0B-71,
当 H0B-70≥32768 时(H0B-79×2
32
+ H0B-77)=(H0B-70-65536)×R
E
+ H0B-71 。
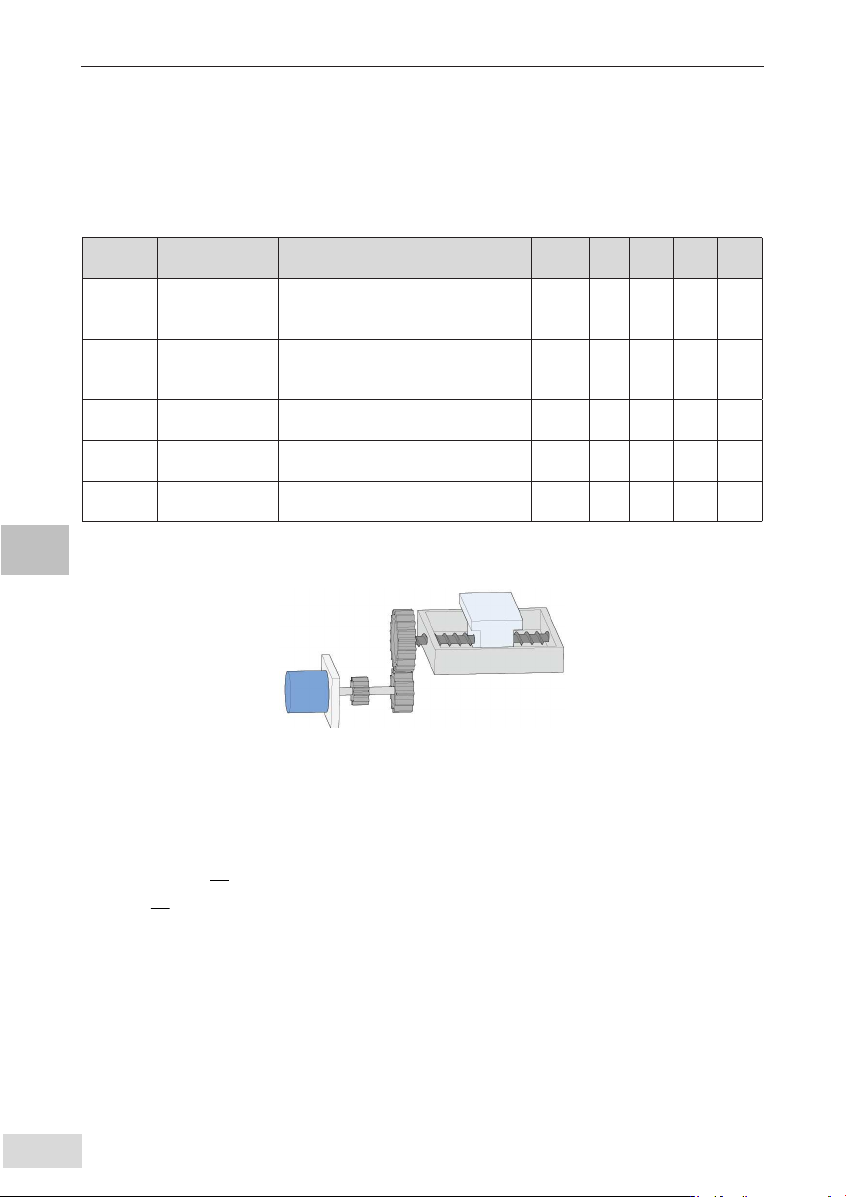
3) 绝对值位置线性模式
功能码 名称 设定范围 单位
出厂
设定
生效
时间
类别
相关
模式
H05-46
绝对位置线性模
式位置偏置(低
32 位)
-2147483648~2147483647
编码器
单位
0
立即
生效
停机
设定
ALL
H05-48
绝对位置线性模
式位置偏置(高
32 位)
-2147483648~2147483647
编码器
单位
0
立即
生效
停机
设定
ALL
H0B-07 绝对位置计数器 -
指令单
位
0 - 显示 PST
H0B-58
机械绝对位置(低
32 位)
-
编码器
单位
0 - 显示 ALL
H0B-60
机械绝对位置(高
32 位)
-
编码器
单位
0 - 显示 ALL
此模式主要用于设备负载行程范围固定,编码器多圈数据不会溢出的场合,如下图滚珠丝杠传动
机构。
图 4-16 滚珠丝杠传动机构示意图
假设机械绝对位置 (H0B-58 和 H0B-60) 为 P
M
,(PM=H0B-60×2
32
+ H0B-58), 编码器绝对位置为
P
E
【P
E
范围为 -2
38
~(2
38
-1)】,绝对位置线性模式位置偏置 (H05-46 和 H05-48) 为 P
O
,则三者关
系为 P
M
=P
E
- P
O
。
假设电子齿轮比为
电子齿轮比
B
A
=
编码器分辨率
,绝对位置计数器(H0B-07)表示机械当前绝对位置(指令单位),H0B-
07=P
M
/(
电子齿轮比
B
A
=
编码器分辨率
)。
绝对位置线性模式位置偏置 H05-46 和 H05-48 默认为 0,启用驱动器原点复归功能,原点复归结
束后驱动器自动计算编码器绝对位置与机械绝对位置偏差,赋值给 H05-46 和 H05-48 并保存在
EEPROM 中。
绝对位置线性模式编码器多圈数据范围是 -32768~32767,如果正转圈数大于 32767 或反转圈数
小于 -32768,会发生 Er. 735(编码器多圈计数溢出故障),可通过设置 H0A-36 屏蔽该故障。