00193928-03 - 第120页
3 Technická data Návod k obsluze SIPLACE HF-série 3.7 Osazovací hlavy Verze software SR.50x.xx Vydání 01/2006 CZ 120 12 pipet hlav S IPLACE C ollect& Place o kolo vodo rovné o sy . T o ne ní jen p ro úspo ru mís ta: …
Návod k obsluze SIPLACE HF-série 3 Technická data
Verze software SR.50x.xx Vydání 01/2006 CZ 3.7 Osazovací hlavy
119
3
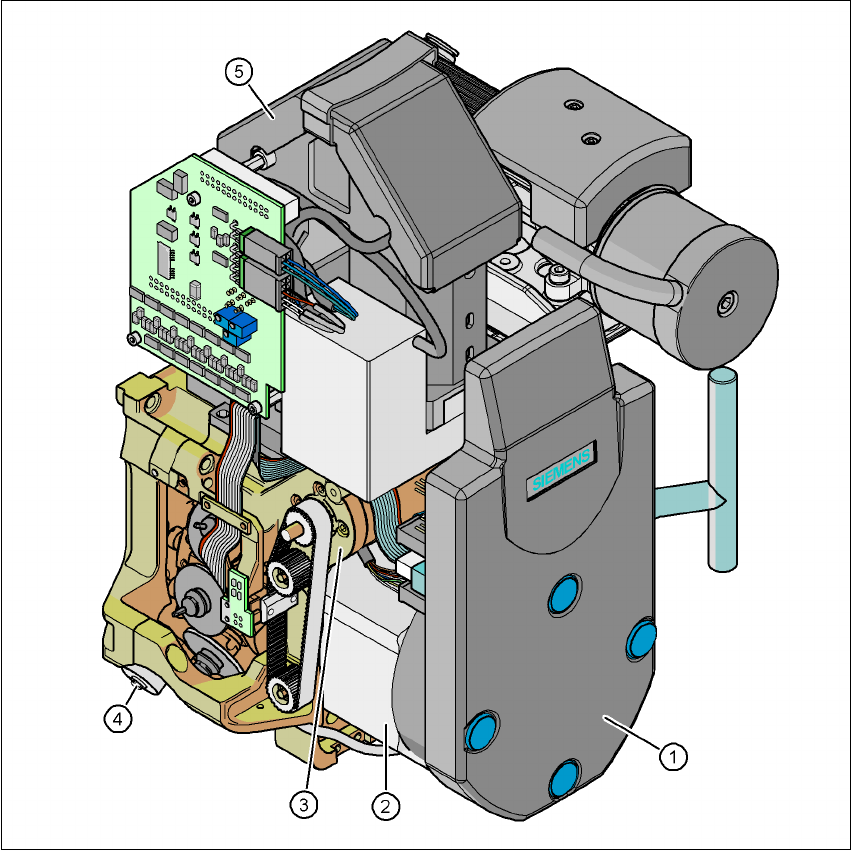
Obr. 3.7 - 4 12-ti segmentová hlava Collect&Place - funk
č
ní skupiny díl 2
3
(1) Deska rozdělovače (pod krytem)
(2) Pohon hvězdy- DR-motor
(3) Motor osy Z
(4) Pohon stavění ventilu
(5) Kamera součástek 24 x 24
3.7.2.1 Popis
12-ti segmentová hlava Collect&Place pracuje na principu Collect&Place, tzn., že během jednoho
cyklu je z osazovací hlavy odebráno 12 součástek, na cestě do osazovací polohy se součástka
opticky centruje a natáčí do potřebné osazovací polohy. Potom součástku za pomoci ofukovacího
vzduchu osadí jemně a přesně na desku tištěných spojů. Oproti klasickým "Chipshootern" rotuje

3 Technická data Návod k obsluze SIPLACE HF-série
3.7 Osazovací hlavy Verze software SR.50x.xx Vydání 01/2006 CZ
120
12 pipet hlav SIPLACE Collect&Place okolo vodorovné osy. To není jen pro úsporu místa: menší
průměr ve srovnání s klasickým "Chipshootern" znamená podstatně menší odstředivou sílu. Tak
je maximálně sníženo riziko posunutí součástky během transportu. 3
K tomu přibývá ještě jeden klad: doba taktu hlavy Collect&Place je pro všechny součástky stejná.
To znamená, že osazovací výkon je nezávislý na velikosti součástek. 3
3
Kontrolní a samoučící funkce 3
Různé kontrolní a samoučící funkce zvyšují spolehlivost hlavy Collect&Place. 3
– Kontroly vakua na pipetách ukazují například na to, zda byla součástka správně odebrána a
osazena.
–Pomocí značky na podavači je zjišt'ována exaktní poloha pro odebrání součástky na
podavači.
– Kamera součástek na osazovací hlavě určuje přesnou polohu každé součástky na pipetě.
Odchylky od odebírací polohy jsou korigovány už před osazováním. Při dalším odebrání
součástky je přihlédnuto k průměru odchylek za posledních 10 osazovacích případů. Tak se
nadále zvyšuje přesnost odebírání.
– Mimoto je kontrolován i tvar součástky. Pokud se zjištěná geometrická data odchylují od
programovaných dat, není součástka použita pro osazování.
– Svislá osa (osa Z) pro odebírání součástek a osazování pracuje v módu senzor-stop. Tím
jsou vyrovnávány výškové rozdíly vzniklé při odebírání součástek a nerovnostmi desky.
Průměr odchylek z posledních deseti osazovacích případů je také zahrnut do stanovení další
rychlosti zdvihu a osazování. Programovaná osazovací síla tak zůstane vždy konstantní.
– Pro zvýšení jistoty osazování může být na hlavě C&P instalován senzor součástek. Senzor
součástek kontroluje vedle přítomnosti součástky na pipetě
také poměr hran součástky.
Tímto způsobem se zjišt'uje, zda byla součástka odebrána pipetou na šířku nebo na výšku.
– Pomocí rozpoznávacího modulu DCA (příslušenství na přání) může 12-ti segmentová hlava
Collect&Place opticky centrovat a osazovat součástky o velikosti 0,6 x 0,3 mm² až 13 x 13
mm². Při osazování součástek High-Speed-Flip-Chips a Bare-Die optimalizuje rozpoznávací
modul DCA rychlost a přesnost. Hodnoty najdete v tabulce na straně 122
.
3
3.7.2.2 Popis funkce
12-ti segmentová hlava Collect&Place má tři osy: osu DR nebo osu hvězdy, osu Z a osu DP. 3
Návod k obsluze SIPLACE HF-série 3 Technická data
Verze software SR.50x.xx Vydání 01/2006 CZ 3.7 Osazovací hlavy
121
Hvězda rotuje se svými 12 segmenty okolo osy hvězdy. Segmenty jsou držáky pinol. Na každé
pinole je umístěna pipeta. Pipetou jsou součástky přisávány a transportovány z odebírací/
osazovací polohy (1) k odhazovací poloze (3), k poloze pro optické centrování (7) nebo k poloze
pro otáčení (9). 3
Osa Z vykonává svislý pohyb. Každá pinola, která se nachází ve nejnižší poloze hvězdy (1), je
touto osou pohybována nahoru nebo dolu. Tímto pohybem se odebírají součástky z podavačů a
pokládají na desky. Osa Z je tzv. "inteligentní osa". "Všímá si" odebírací výšky jedné každé stopy
podavače a osazovací výšky pro každou součástku. Tak lze osazovací proces urychlit.
Programovaná osazovací síla zůstává konstantní. 3
3
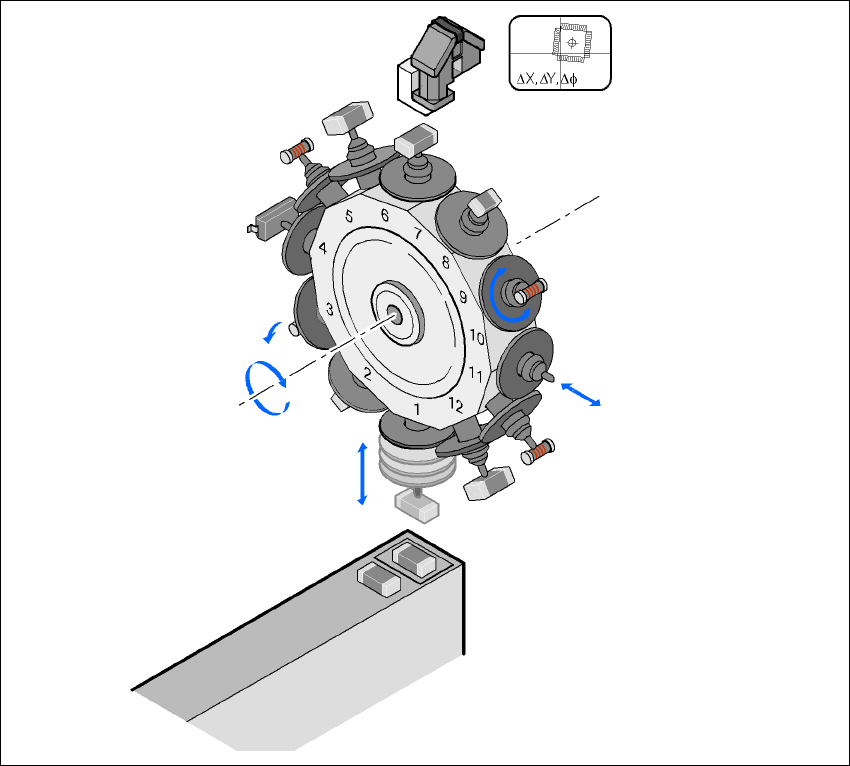
Obr. 3.7 - 5 Popis funkce
Osa DP otáčí opticky centrovanou součástkou do požadované polohy. Průběhy pohybů rotačních
a posuvných os jsou řízeny regulačními obvody. Senzory polohy a rychlosti zjišt'ují aktuální
hodnoty pohybů os a předávají je řízení os. Ze srovnání požadovaných a aktuálních hodnot jsou
zjišt'ovány parametry síly a rychlosti pro servozesilovače a tím pro prováděné pohyby os. Hodnoty
Kamera součástek
Osa DP
Součástku natočit
do osazovací polohy
Pinolu vytáhnout
nebo vložit
Osa Z
Součástku odebrat
nebo osadit
Osa hvězdy
Rotace hvězdy
Součástku odhodit