00193933-03.pdf - 第122页
3 Tekniske data Driftsvejledning SIPLACE HF-serie 3.7 Collect&Place-hov ed Softwareversion SR.50x.xx Udgav e 01/2006 DK 122 parametrene for servoforstær kerne og såled es til den aksebevæge lse, der skal udføres. V a…
Driftsvejledning SIPLACE HF-serie 3 Tekniske data
Softwareversion SR.50x.xx Udgave 01/2006 DK 3.7 Collect&Place-hoved
121
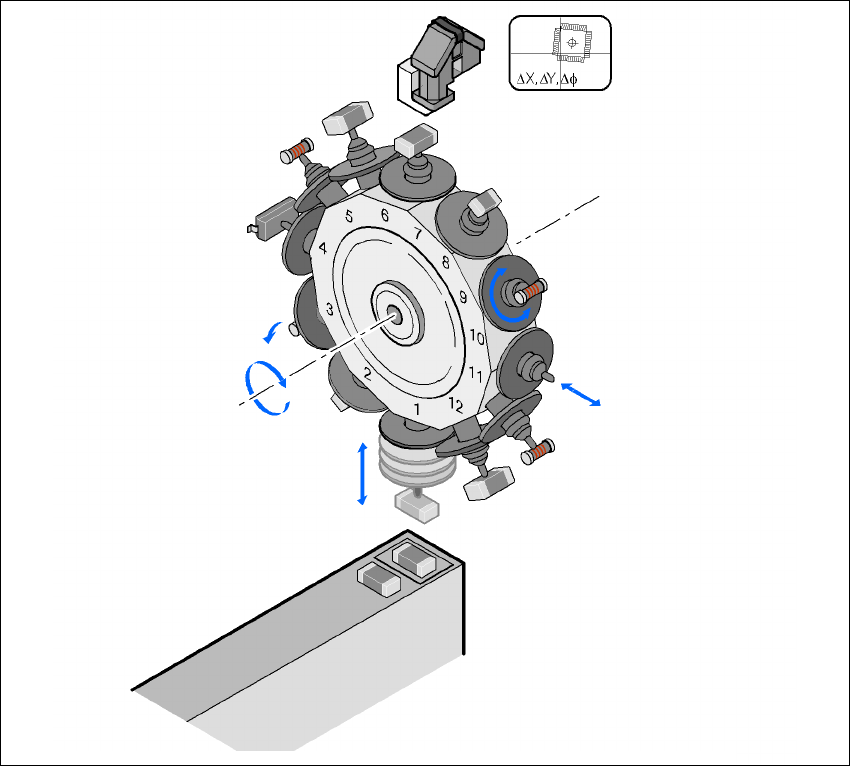
Stjernen roterer med sine 12 segmenter omkring stjerne-aksen. Segmenterne bærer pinolrø-
rene. På hvert pinolrør sidder der en pipette. Dermed suges komponenterne fast, hvorefter de
transporteres fra hente-/bestykningspositionen (1), til udsmidningspositionen (3), til den optiske
centreringsposition (7) eller til drejepositionen (9). 3
Z-aksen udfører en vertikal bevægelse. Hvert pinolrør, der befinder sig i den nederste stjernepo-
sition (1), løftes eller sænkes af denne akse. Dermed hentes komponenterne af transportørerne
og sættes fra på printpladen. Z-aksen er en såkaldt „intelligent akse“. Den "husker" hentehøjden
for enhvert transportørspor og bestykningshøjden for enhver komponent. På den måde kan be-
stykningsprocessen accelereres. Den programmerede påsætningskraft forbliver konstant. 3
3
Fig. 3.7 - 5 Funktionsbeskrivelse
3
DP-aksen drejer den optisk centrerede komponent i den ønskede bestykningsposition. Bevægel-
sesforløbene for rotations- og også translationsakserne styres af reguleringskredse. Sensorer for
position og hastighed overfører de faktiske værdier for aksebevægelse til akseaktiveringen. Ved
at sammenligne de indstillede og de faktiske værdier finder systemet frem til kraft- og hastigheds-
Komponent-kamera
DP-akse
Komponent drejes
i bestykningsposition
Pinolrør tages ud
eller sættes i
Z-akse
Komponent hentes
eller bestykkes
Stjerne-akse
Stjernerotation
Komponent smides ud
3 Tekniske data Driftsvejledning SIPLACE HF-serie
3.7 Collect&Place-hoved Softwareversion SR.50x.xx Udgave 01/2006 DK
122
parametrene for servoforstærkerne og således til den aksebevægelse, der skal udføres. Vakuum-
værdierne på pipetten kontrolleres elektronisk hele tiden under hele hente- og
bestykningsprocessen for at holde bestykningsfejlraten så lav som mulig. 3
3.7.2.3 Tekniske data
3
3
*) Vær opmærksom på, at det bestykbare komponent-spektrum også påvirkes af pad-geometrierne, de kundespeci-
fikke standarder og komponent-emballagetolerancerne.
12-segment-Collect&Place-hoved
med standard-komponent-kamera
(24x24)
12-segment-Collect&Place-
hoved med DCA-kamera
Komponent-spektrum *) 0201 til PLCC44, BGA, µBGA,
Flip-Chip, TSOP, QFP, SO til
SO32, DRAM
0201 til Flip-Chip, Bare Die
Komponent-specifikation
Max. højde
Min. benafstand
Min. ball-afstand
Min. ball-diameter
Min. mål
Max. mål
Max. vægt
6 mm
0,5 mm
0,35 mm
0,2 mm
0,6 x 0,3 mm²
18,7 x 18,7 mm²
2 g
6 mm
0,4 mm
0,2 mm
0,11 mm
0,6 x 0,3 mm²
13 x 13 mm²
2 g
Programmeret krafttrin
1
2
3
4
5
Programmeret påsætningskraft [N]
2,4 ± 0,5
2,4 ± 0,5
3 + 1
4 + 1
5 + 1
Pipettetyper 9xx 9xx
X-/Y-nøjagtighed ± 45 µm/3 σ, ± 60 µm/4 σ ± 41 µm/3 σ, ± 55 µm/4 σ
Vinkelnøjagtighed ± 0,5°/3 σ, ± 0,7°/4 σ ± 0,5°/3 σ, ± 0,7°/4 σ
Driftsvejledning SIPLACE HF-serie 3 Tekniske data
Softwareversion SR.50x.xx Udgave 01/2006 DK 3.7 Collect&Place-hoved
123
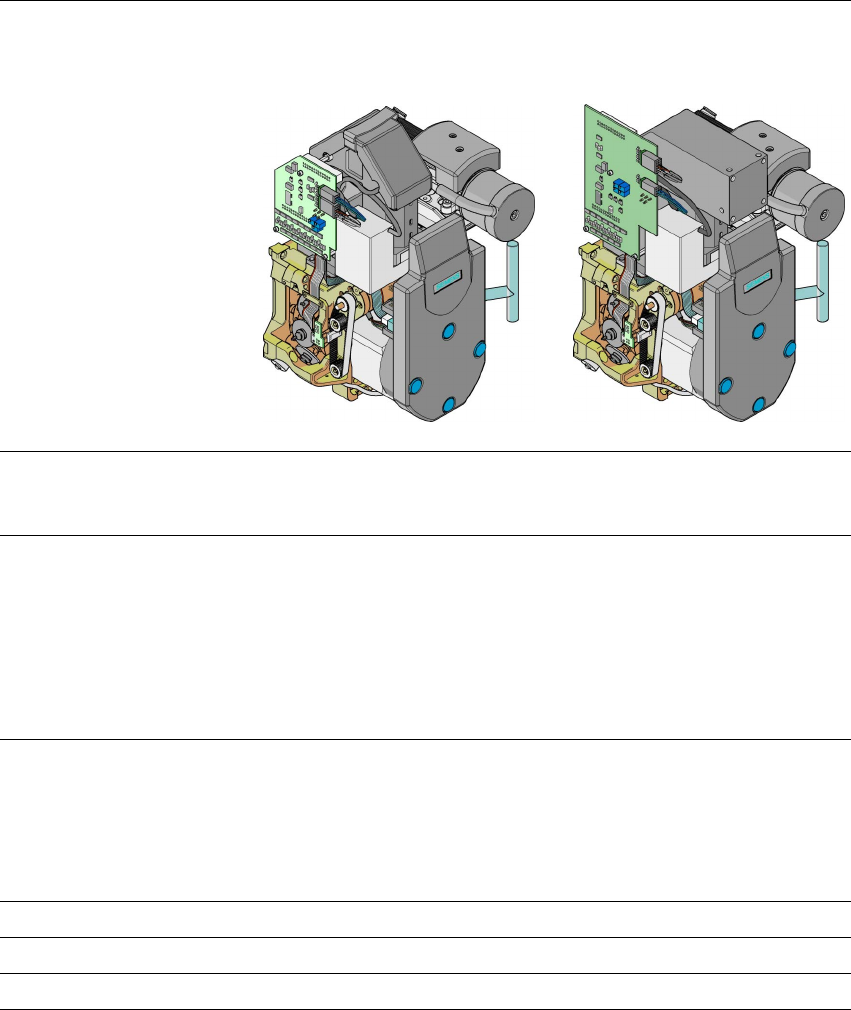
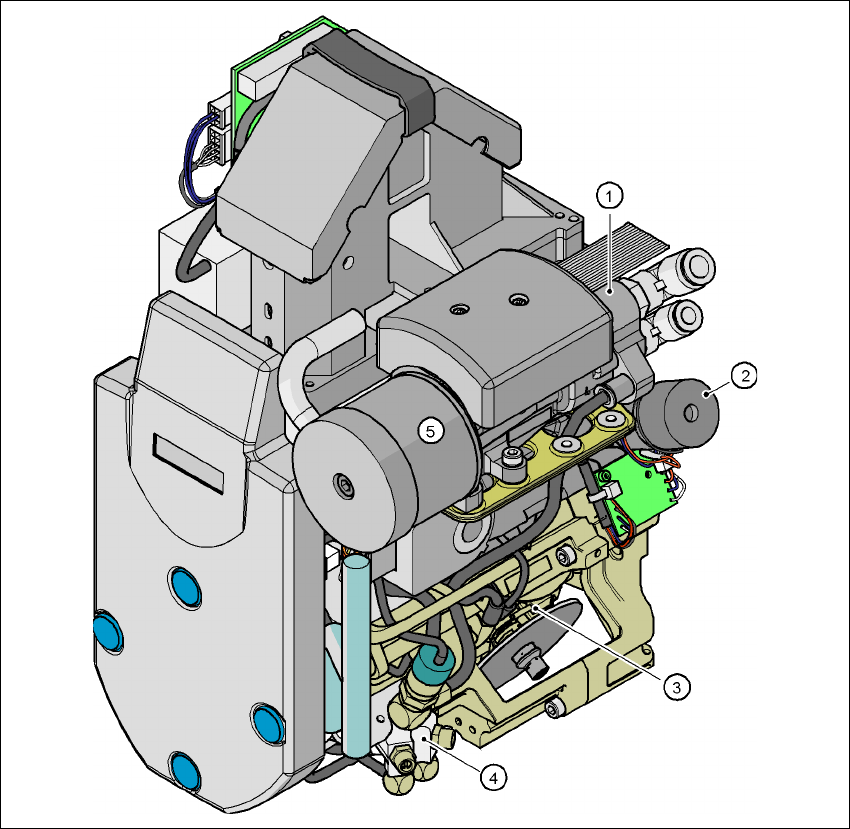
3.7.3 6-segment-Collect&Place-hoved for High-Speed IC-bestykning
3
Fig. 3.7 - 6 6-segment-Collect&Place-hoved - funktionsgrupper del 1
(1) Vakuumgenerator
(2) Drejestation - DP-akse
(3) Stjerne med 6 pinoler, stjerne-akse
(4) Blæseluftventil
(5) Lyddæmper