00193933-03.pdf - 第128页
3 Tekniske data Driftsvejledning SIPLACE HF-serie 3.7 Collect&Place-hov ed Softwareversion SR.50x.xx Udgav e 01/2006 DK 128 3.7.4 SIPLACE T winHead for meget nøjagtig IC -bestykn ing 3 Fig. 3.7 - 9 T winHead for mege…
Driftsvejledning SIPLACE HF-serie 3 Tekniske data
Softwareversion SR.50x.xx Udgave 01/2006 DK 3.7 Collect&Place-hoved
127
3.7.3.3 Tekniske data
3
3
*) Vær opmærksom på, at det bestykbare komponent-spektrum også påvirkes af pad-geometrierne, de kundespeci-
fikke standarder og komponent-emballagetolerancerne.
6-segment-Collect&Place-hoved
med standard-komponent-
kamera (39x39)
6-segment-Collect&Place-hoved
med DCA-kamera
Komponent-spektrum *) 0603 til 32 x 32 mm² 0201 til Flip-Chip, Bare Die
Komponent-specifikation
Max. højde
Min. benafstand
Min. ball-afstand
Min. ball-diameter
Min. mål
Max. mål
Max. vægt
8,5 mm
0,5 mm
0,56 mm
0,32 mm
1,6 x 0,8 mm²
32 x 32 mm²
5 g
8,5 mm
0,4 mm
0,2 mm
0,11 mm
0,6 x 0,3 mm²
13 x 13 mm²
5 g
Programmeret krafttrin
1
2
3
4
5
Programmeret påsætningskraft [N]
2,4 ± 0,5
2,4 ± 0,5
3 + 1
4 + 1
5 + 1
Pipettetyper 8xx, 9xx 8xx, 9xx
X-/Y-nøjagtighed ± 45 µm/3 σ, ± 60 µm/4 σ ± 41 µm/3 σ, ± 55 µm/4 σ
Vinkelnøjagtighed ± 0,2°/3 σ, ± 0,3°/4 σ ± 0,2°/3 σ, ± 0,3°/4 σ
3 Tekniske data Driftsvejledning SIPLACE HF-serie
3.7 Collect&Place-hoved Softwareversion SR.50x.xx Udgave 01/2006 DK
128
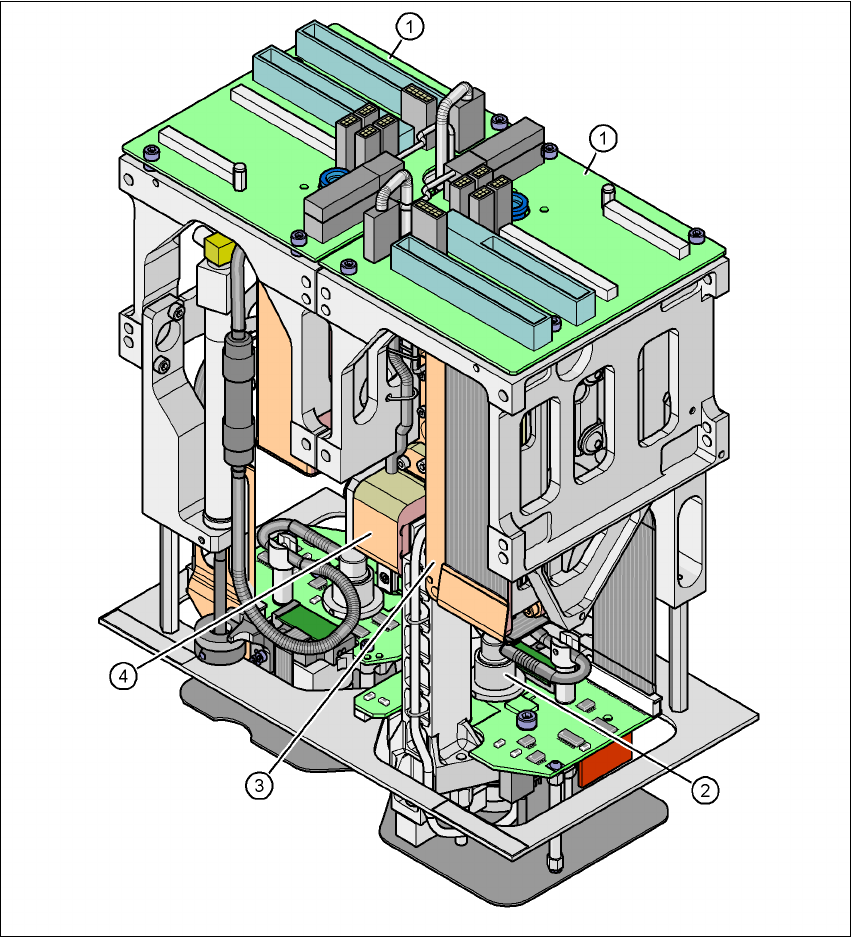
3.7.4 SIPLACE TwinHead for meget nøjagtig IC-bestykning
3
Fig. 3.7 - 9 TwinHead for meget nøjagtig IC-bestykning
3
(1) Pick&Place-modul - TwinHead består af 2 Pick&Place-moduler
(2) DP-akse
(3) Drev for Z-aksen
(4) Inkremental vejmålesystem for Z-aksen

Driftsvejledning SIPLACE HF-serie 3 Tekniske data
Softwareversion SR.50x.xx Udgave 01/2006 DK 3.7 Collect&Place-hoved
129
3.7.4.1 Beskrivelse
Dette højtudviklede bestykningshoved består af to bestykningshoveder af samme type (tvillinge-
hoved), der er koblet ved siden af hinanden og som arbejder efter Pick&Place-princippet. Twin-
Head er velegnet til at forarbejde særligt krævende og store komponenter. To komponenter
hentes af bestykningshovedet, centreres optisk på vej hen til bestykningspositionen og drejes i
den nødvendige bestykningsposition. Herefter sættes de forsigtigt og positionsnøjagtigt fra på
printpladen ved hjælp af reguleret blæseluft. 3
Til TwinHead er der blevet udviklet nye pipetter (type 5xx). Med en adapter kan man også anvende
Pick&Place-hovedets pipetter af typen 4xx og Collect&Place hovedernes pipetter af typen 8xx og
9xx. 3
Kontrol- og selflearning-funktioner 3
Forskellige kontrol- og selflearning-funktioner øger TwinHead´s pålidelighed. 3
– Vakuumkontrol på pipetterne viser f.eks., om komponenten er blevet hentet eller afleveret
korrekt.
– Højtopløsende, intelligente visionsmoduler som f.eks. Finepitch og Flip-Chip visionsmoduler
– konstaterer også meget små afvigelser ved komponentpositionen, korrigerer disse og sikrer
dermed en korrekt bestykningsposition. Komponent-kameraerne er fastgjort stationært på
maskinens ramme.
– Også komponentens husform kontrolleres. Afviger de beregnede geometriske data fra de
programmerede data, bestykkes komponenten ikke.
– De fastlagte påsætningskræfter for komponenterne måles og overvåges af en kraftsensor.
– I tilfælde af trykluft- eller strømsvigt løftes den vertikale akse (Z-akse) i en sikker position for
at undgå et hovedcrash.
3.7.4.2 Funktionsbeskrivelse
TwinHead består af to Pick&Place-hoveder, der er koblet ved siden af hinanden, og hvor hvert ho-
ved styres separat. Hvert hoved har to akser, nemlig Z-aksen og DP-aksen (se Fig. 3.7 - 8
). 3
Z-aksens bevægelsesvej registreres af et højt opløsende, lineært inkrementalmålesystem. Z-ak-
sen gennemfører en vertikal bevægelse. En linearmotor løfter og sænker Z-aksen. Dermed hen-
tes komponenter ud af transportører hhv. trays og sænkes ned på printpladen. Z-aksen er en
såkaldt „intelligent“ akse. Den "husker" hentehøjden for transportører og trays og bestykningshøj-
den for hver komponent. På den måde kan bestykningsprocessen accelereres. Den programme-
rede påsætningskraft måles og overvåges af en kraftsensor. 3