CP-7[732-742]-series Mechanical Reference(2.9E).pdf - 第166页
4. Adjust the height of the bracket so that the distance between the lever and the pin is 0.6 mm. 5. Return the cam angle to 0 degrees. Switch on the 1st nozzle UP/DOWN solenoid valve in order to work the cam lever. Chec…
Part 4 Chapter 1 Station Adjustments
Edition 2.4 4-1-15 CP-7 series Mechanical Reference
1.5.2 Valve Switching Lever Height Adjustment
This adjustment should be performed on the reference head after completing
adjustments to the vertical movement of the nozzle. (Refer to 1.4 “Nozzle Vertical
Movement During Pickup” for details.)
The reference head can be identified by its height. All heads are measured with spools
lifted, and the lowest one is referred to as the reference head.
1. Press the EMERGENCY STOP button to take the 200V down to 100V.
WARNING
• Always be sure to cut off the 200V power before carrying
out any work.
• Exercise extreme caution when working on the machine if
the cam is not at its origin (0 deg.). Recoil of the cam
axis can endanger the operator.
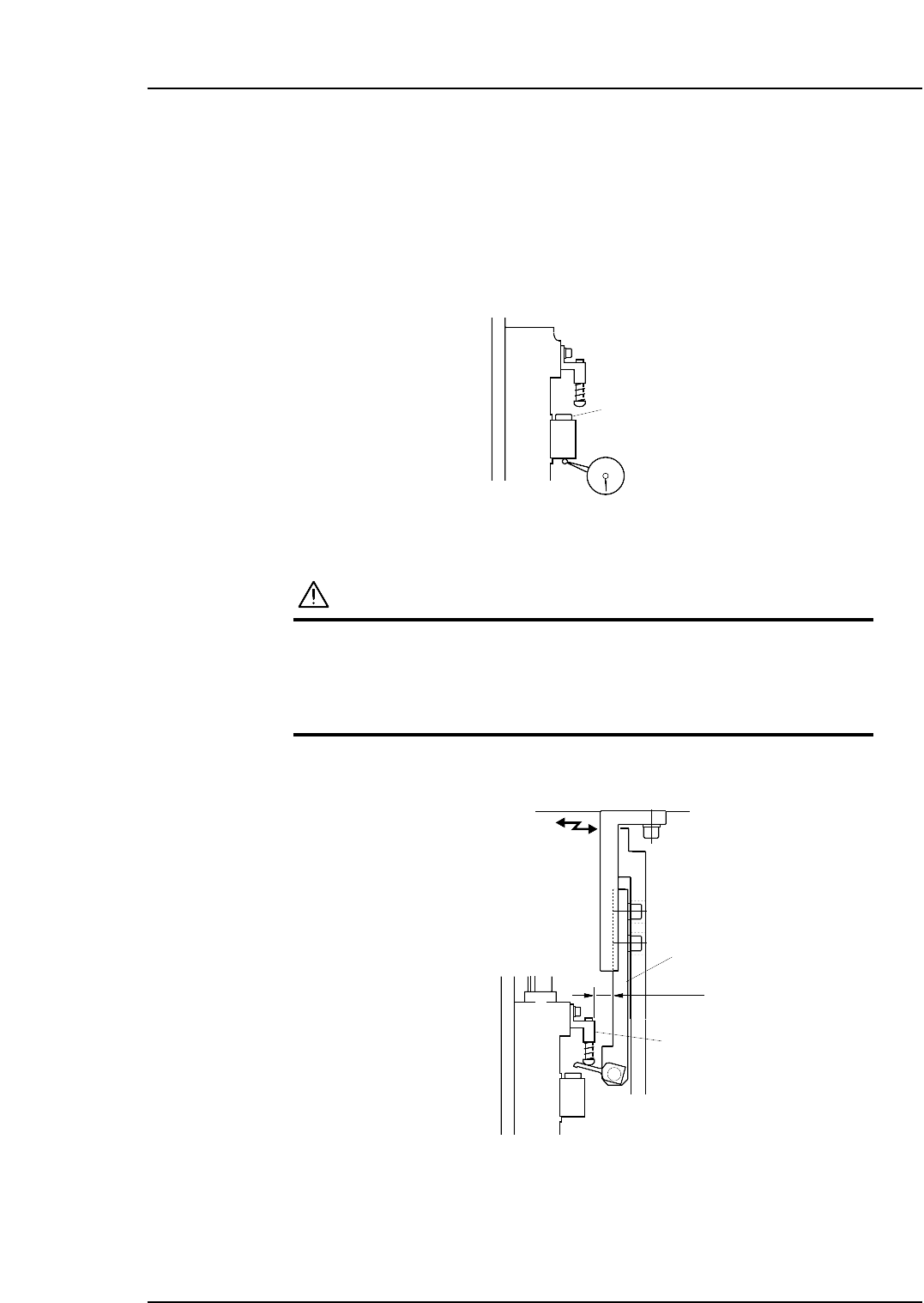
2. Adjust the position of the lever bracket so that the distance from the pin bracket is
12 mm.
3. With the Y030 ST1 PICKUP SOL DISENGAGED ON, use the cam handle to rotate
the cam to 170°.
Lever bracket
Pin bracket
C7SM4056
12 mm
Spool
C7SM4055
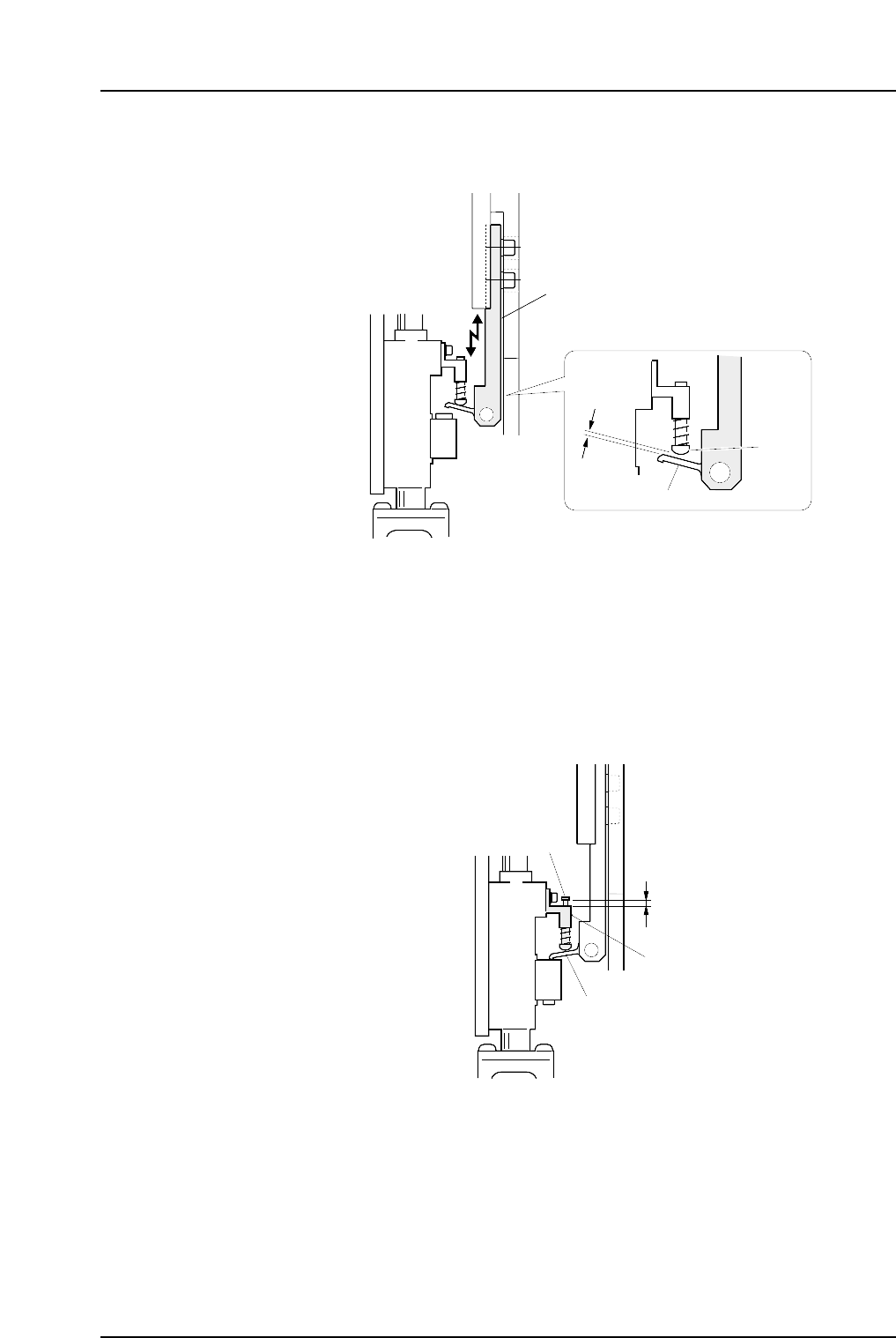
4. Adjust the height of the bracket so that the distance between the lever and the pin
is 0.6 mm.
5. Return the cam angle to 0 degrees. Switch on the 1st nozzle UP/DOWN solenoid
valve in order to work the cam lever.
Check the servo counter to verify that the Proper data (PICK UP POS. NZ) is at the
pick-up height (approx. 4000 pulse position).
6. Use the cam handle to rotate the cam to 170 degrees.
7. Ensure that the clearance of the pin from the bracket is within the range of 0.5 to
1.0 mm after the pin has been raised by the lever.
0.5~1.0 mm
Pin bracket
Pin
Lever
C7SM4021a
Lever bracket
C7SM4020a
0.6 mm
Lever
Pin
Part 4 Chapter 1 Station Adjustments
Edition 2.4 4-1-16 CP-7 series Mechanical Reference
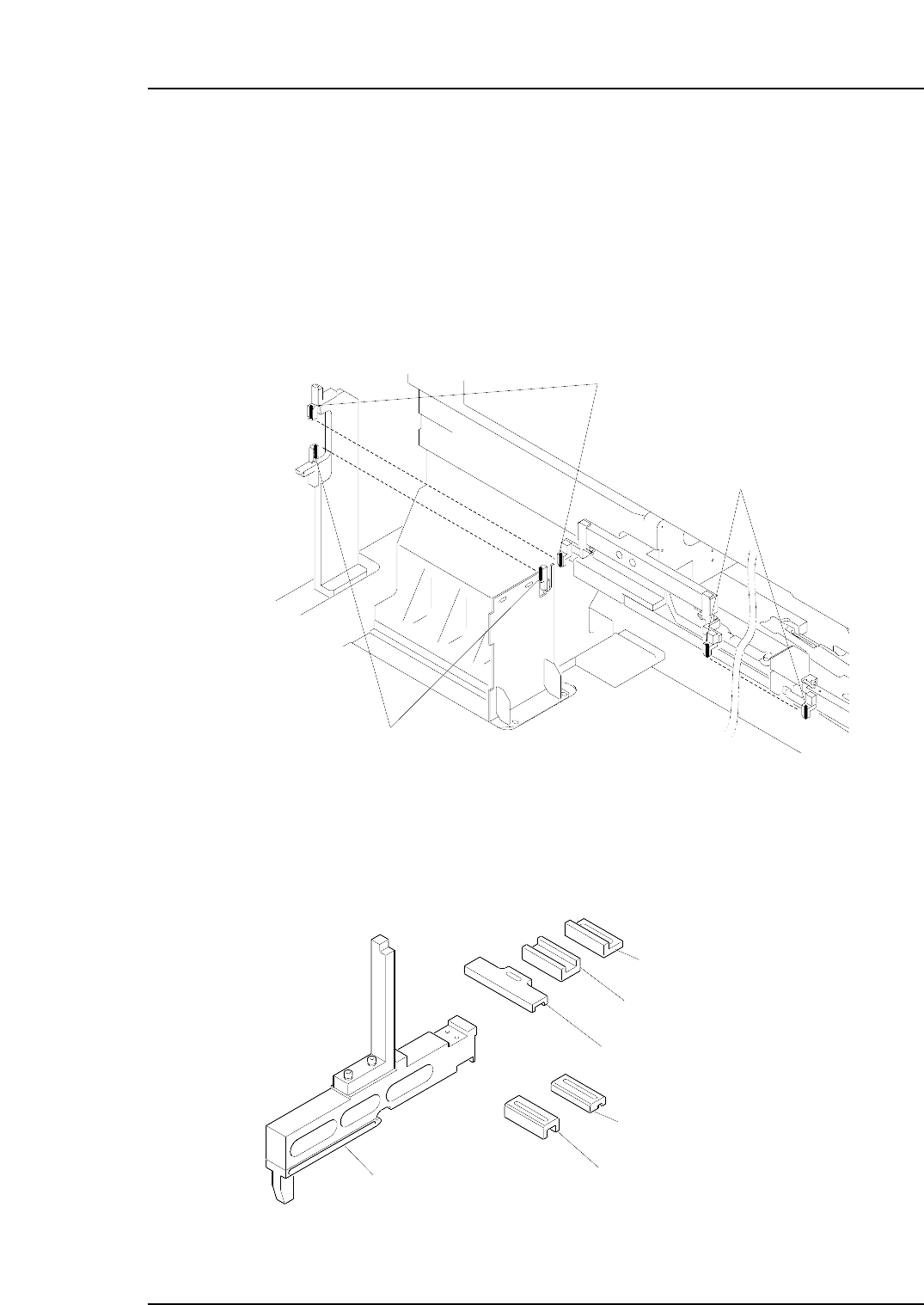
1.6 Feeder Height Error Detection (Station 1)
Point
To detect the positions of the feeders, two sets of sensors are used at each of the retract
areas. A further pair of sensors are also used at the pickup position, bringing the total
number to five.
A dedicated jig is used to position these sensors. The sensitivity of the sensors must also
be adjusted.
Note: The above figure represents device table one, but the same arrangement can also be found
on device table two.
The jig used to adjust the sensor positions is shown below.
Positioning jig body
(ADCPJ8020)
Block
(DCPJ0040)
Block
(DCPJ0050) < For CP-732E/CP-742ME >
Block
(DCPJ0060)
Block
(DCPJ0070)
Block
(DGPJ5070) < For CP-742E >
C7SM4049b
Feeder check sensor
(D1 retract area upper direction check)
Feeder check sensor
(D1 retract area lower direction check)
Feeder check sensor
(Pickup area upper direction check)
C7SM4022a
Part 4 Chapter 1 Station Adjustments
Edition 2.4 4-1-17 CP-7 series Mechanical Reference