第7章 控制单元检验 控制基板.pdf - 第17页
7-17 基板状态诊断 LED 信息 LED ON DES C RIPTION Remark LED ON DESCRIPTION Remark LED4 Can 发信 LED5 IO RESET LED1 出现 Error LED6 基板输出电源 LED3 Can 收信 LED7 基板动作电源 LED2 CPU 动作 7.3.7. X7043 TWIN SER VO Board…
7-16
输入 (Input)
PIN NO. DEF. DESCRIPTION
1 CANH
2 CANL
CAN 通信信号
连接其它NODE的CAN通信
信号
CN2
3 /IO-RES
RESET 信号
FROM CAN MASTER
1 24VP
OUTPUT PORT用 DC+24V
电源
2 24V
INPUT PORT用 DC+24V 电
源
CN1
3/4 24G
DC+24V 电源 GROUND
输出 (Output)
PIN NO. DEF. DESCRIPTION 비고
1 OUTER_6P
HEAD#6 OUTER 电源
2 OUTER_6M HEAD#6 OUTER 电源
3 OUTER_5P HEAD#5 OUTER 电源
4 OUTER_5M
HEAD#5 OUTER 电源
5 OUTER_4P HEAD#4 OUTER 电源
6 OUTER_4M
HEAD#4 OUTER 源电
7 OUTER_3P HEAD#3 OUTER 电源
8 OUTER_3M
HEAD#3 OUTER 电源
9 OUTER_2P HEAD#2 OUTER 电源
10 OUTER_2M HEAD#2 OUTER 电源
11 OUTER_1P
HEAD#1 OUTER 电源
CN3
12 OUTER_1M HEAD#1 OUTER 电源
12PIN
CONNECTOR
1 FIDU_OUT_P
FIDUCIAL OUTER 电源
2 FIDU_OUT_M FIDUCIAL OUTER 电源
CN4
3 / 4 N /C
4PIN
CONNECTOR
1 FIDU_IN_P FIDUCIAL INNER 电源
2 FIDU_IN_P
FIDUCIAL INNER 电源
CN5
3 / 4 N / C
4PIN
CONNECTOR
1 GND GROUND
2 GND GROUND
3 SIDE_1 HEAD#1 SIDE 电源
4 SIDE_2 HEAD#2 SIDE 电源
5 SIDE_3
HEAD#3 SIDE 电源
6 SIDE_4
HEAD#4 SIDE 电源
7 SIDE_5 HEAD#5 SIDE 电源
CN6
8 SIDE_6
HEAD#6 SIDE 电源
8PIN
CONNECTOR
7-17
基板状态诊断LED信息
LED ON DESCRIPTION Remark LED ON DESCRIPTION Remark
LED4
Can 发信
LED5 IO RESET
LED1
出现Error
LED6
基板输出电源
LED3
Can收信
LED7
基板动作电源
LED2
CPU 动作
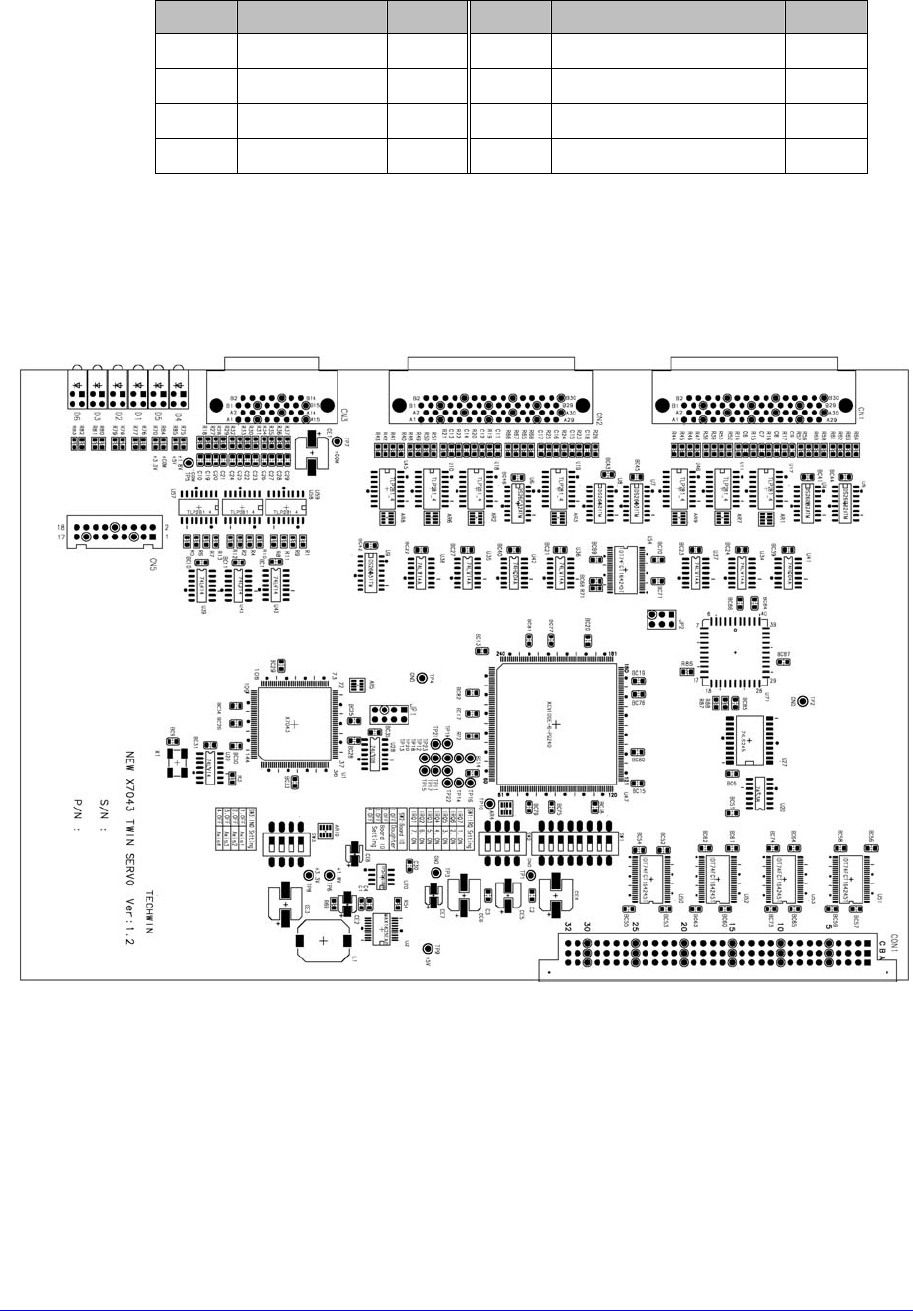
7.3.7. X7043 TWIN SERVO Board
本设备的Y轴驱动部是由Y1和Y2构成的Twin Servo System。 因此,必须由 Y1轴
和Y2轴的同步驱动带动Y轴运转。 本X7043 TWIN SERVO Board是Y1轴和Y2轴驱
动时检查Y1和Y2同步运转是否正常的监视装置。
使用的电源
外部输入电源: 无须输入其他电源。
内部使用的电源: +1.8VDC, +3.3VDC, +5VDC, +24VDC
7-18
主要功能说明
输入 (INPUT) : X3203 #1 CN1 PART
PIN NO. DEF. DESCRIPTION
A1, B1 Y1(Y2)_CW Y1(Y2 ) Axis CW Positive Signal
A2, B2 Y1(Y2)_CW# Y1(Y2) Axis CW Negative Signal
A3, B3 Y1(Y2)_CCW Y1(Y2) Axis CCW Positive Signal
A4, B4 Y1(Y2)_CCW# Y1(Y2) Axis CCW Negative Signal
A5, B5 Y1(Y2)_CLR Y1(Y2) Axis Counter Clear Positive Signal
A6, B6 Y1(Y2)_CLR# Y1(Y2) Axis Counter Clear Negative Signal
A7, B7 +COM +24VDC I/O Power
A8, B8 Y1(Y2)_SON_2#
Y1(Y2) Servo-On Signal (From X3203
Board)
A9, B9 Y1(Y2)_SP1 Y1(Y2) Axis Output 1 Signal
A10, B10 Y1(Y2)_SP2 Y1(Y2) Axis Output 2 Signal
A11, B11 Y1(Y2)_ARM_RST# Y1(Y2) Axis Alarm Reset Signal
A12, B12 Y1(Y2)_ARM_1# Y1(Y2) Axis Alarm Signal
A13, B13 -COM +24VDC I/O Power
A14, B14 Y1(Y2)_INP Y1(Y2) Axis In-Position Signal
A15, B15 -COM +24VDC I/O Power
A16, B16 Y1(Y2)_PA_1
Y1(Y2) Axis Encoder Phase A Positive
Signal
A17, B17 Y1(Y2)_PA_1#
Y1(Y2) Axis Encoder Phase A Negative
Signal
A18, B18 Y1(Y2)_PB_1
Y1(Y2) Axis Encoder Phase B Positive
Signal
A19, B19 Y1(Y2)_PB_1#
Y1(Y2) Axis Encoder Phase B Negative
Signal
A20, B20 Y1(Y2)_PZ_1
Y1(Y2) Axis Encoder Phase Z Positive
Signal
A21, B21 Y1(Y2)_PZ_1#
Y1(Y2) Axis Encoder Phase Z Negative
Signal
A22, B22 GND +5VDC Power(Common Power With VME)
A23, B23 N.C N.C
A24, B24 +5VDC +5VDC Power(Common Power With VME)
A25, B25 N.C N.C
A26, B26 +5VDC +5VDC Power(Common Power With VME)
A27, B27 +5VDC +5VDC Power(Common Power With VME)
A28, B28 Y1(Y2)_CS Not Used.
A29, B29 Y1(Y2)_H_OFF Not Used
CN2
A30, B30 Y1(Y2)_O_HEAT Not Used