KE2030取扱説明書Ver.2.01,和文Rev.09.pdf - 第430页
6 - 108 (2) 操作法 空打の起動画面(空打条件設定画面)を図 6-6-1 に示します。 図 図 図 図 6-6-1 空打の起動画面 空打の起動画面 空打の起動画面 空打の起動画面 ① 設定項目切替 基板生産条件ダイアログ・試打ダイアログ・空打ダイアログの切替えが行えます。 ② 生産基板枚数 予定数を入力します。 実績数は,操作オ プション の生産基板枚数の指 定により表示されます。 ③ シーケンス 搭載シーケンスを入力…
6 - 107
6-6. 空打
空打空打
空打
メニューバーの
[
生産条件−空打
]
を選択すると,基板生産の空打条件設定画面になります。
(1)
設定項目
NO
項目
項目項目
項目
内容
内容内容
内容
1
設定項目切替
基板生産条件ダイアログ・試打ダイアログ・空打ダイアログの切替えが行えます。
2
生産予定枚数
空打を行う基板枚数を設定します。
3
シーケンス
搭載シーケンスを入力順か最適化順かの選択します。
4
実行モード
連続生産かステップ動作かを選択します。
5
搭載オフセット
全搭載位置の一括オフセットを指定する。本オフセットが搭載位置に加算され搭載
されます。
6
ステップNO
搭載するデータの範囲を開始行番号と終了行番号で指定します。
搭載データの入力順で指定します。
シーケンスが最適化順のときは,開始行,終了行番号は最適化データ番号になりま
す。
7
搭載カメラ追尾
一枚基板を空打後に,カメラによる搭載点の追尾を行うか否か,また行う場合に自
動送りか手動送りかを設定します。
しない :追尾を行いません。
自動送り :自動で搭載点を追尾します
手動送り :搭載点で停止しオペレータの入力で次点へ移動します。
8
吸着カメラ追尾
基板を空打前に,カメラによる吸着点の追尾を行うか否か,また行う場合に自動送
りか手動送りかを設定します。
しない :追尾を行いません。
自動送り :自動で吸着点を追尾します
手動送り :吸着点で停止しオペレータの入力で次点へ移動します。
9
追尾ユニット指定
追尾するユニットを左,右,両方のいずれかに設定します。
10
自動送り間隔
追尾が自動送りの場合,停止位置での停止時間を設定します。
(単位は,10
msec
が1となります)
11
搬送タイムアウト時
間
出口ステーションに基板クランプ後,入口ステーションで基板が搬送されて
IN
セ
ンサで検知されない場合搬送タイムアウトで生産を開始させる為のタイムアウト
時間を設定できます。
12
生産実行ステーショ
ン
生産を行うステーションを,左・右・両方のいずれかで指定します。
基準ピン補正の項は,操作オプションで設定した状態を表示するのみで,ここでは変更できま
せん。
注意
注意注意
注意
:
6 - 108
(2)
操作法
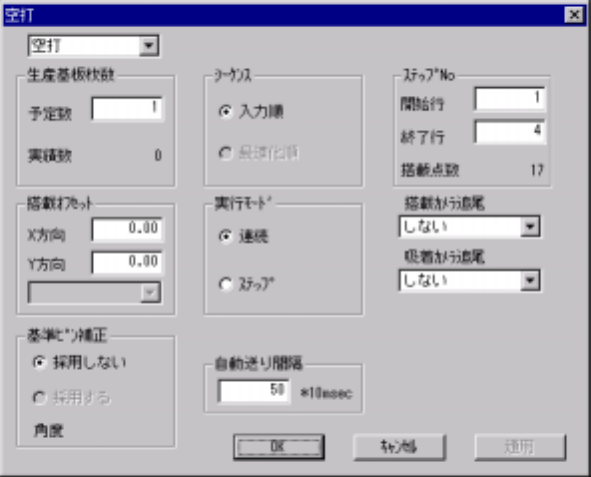
空打の起動画面(空打条件設定画面)を図
6-6-1
に示します。
図
図図
図
6-6-1
空打の起動画面
空打の起動画面空打の起動画面
空打の起動画面
①
設定項目切替
基板生産条件ダイアログ・試打ダイアログ・空打ダイアログの切替えが行えます。
②
生産基板枚数
予定数を入力します。実績数は,操作オプションの生産基板枚数の指定により表示されます。
③
シーケンス
搭載シーケンスを入力順または最適化順のどちらを選択するかをラジオボタンで設定します。
④
実行モード
連続生産か,ステップ動作かをラジオボタンで設定する。
⑤
搭載オフセット
あるロットに特有なオフセット(印刷行程,基準穴あけ行程で)がある場合,本項にXYのオ
フセットを入力すると入力分搭載位置がオフセットされます。
⑥
ステップNO
搭載範囲を限定したい場合開始行と終了行を入力する。搭載点数の項に基板の搭載点数が表示
されており,それぞれ初期値が表示される。
"
シーケンス
"
が最適化順の場合変更不可。
⑦
搭載カメラ追尾
空打後,カメラによる追尾を行うか否かおよび追尾の種類をラジオボタンで設定します。
6 - 109
⑧
吸着カメラ追尾
空打前,カメラによる追尾を行うか否かおよび追尾の種類ををラジオボタンで設定します。
⑨
追尾ユニット指定
追尾を実行するステーションを選択します。
⑩
自動送り間隔
自動送り間隔を入力します。
⑪
基板搬入待ち時間(搬送タイムアウト時間<
Ver
.
1.12
以前>)
出口ステーションに基板クランプ後,入口ステーションで基板が搬送されて
IN
センサで検知
されない場合搬送タイムアウトで生産を開始させる為のタイムアウト時間を設定できます。
⑫
生産実行ステーション
生産を行うステーションを指定します。左・右ステーションを指定した場合は,片側のみの生
産となります。片側のみの生産を行う場合でも,生産プログラムでの吸着データは両ステーシ
ョン分作成ください。
6-6-1.
空打開始
空打開始空打開始
空打開始
空打条件の設定が終了後は,オペレーションパネルの
<START>
スイッチを実行することにより
空打を開始します。
注意
<START>
スイッチを押すと直ちにヘッドが移動し,試打が開始します。
人身への損傷を防ぐ為,動作中は装置内部に手を入れたり,顔や頭を近づけない
で下さい。
<START>
スイッチを押す前に,装置内部の作業をしている人がいないことを確
認して下さい。
<START>
スイッチを押す前に,装置付近にいて,人身の障害になるような人が
いないことを確認して下さい。
<START>
スイッチを押す前に,装置内部の各動作を妨げるもの(調整工具など)
がとりつけられていたり,置かれたりしていない事を確認して下さい
この時,シグナルライトは,緑色の点灯により空打実行中であることを表します。
注意
フィーダバンク認識を一度も行っていない場合に(原点復帰から,もしくはバ
ンクが下降し上昇させた後から),吸着位置移動前にフィーダバンク認識を自動
的に行う場合があります。フィーダバンク認識実行時は,ヘッドが供給装置の
上を横切りますので手や顔を装置内に入れたり近づけないで下さい。特にティ
ーチング,吸着追尾などのメニュー以外からの認識実行時の動作に気をつけて
下さい。