KE2030取扱説明書Ver.2.01,和文Rev.09.pdf - 第56页
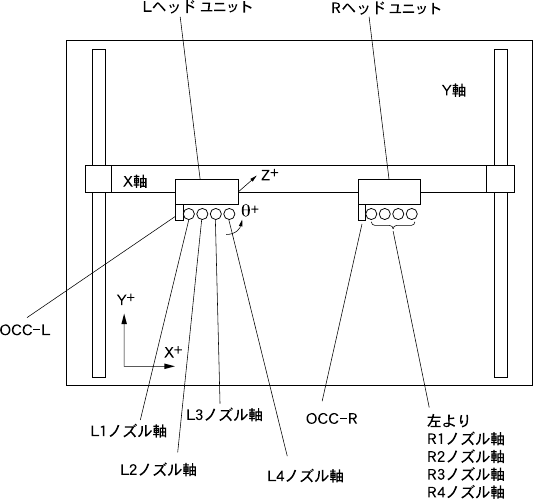
1 - 36 1-3. X, Y , Z 軸の説明 軸の説明 軸の説明 軸の説明 本装置で数値制御される軸は以下に示す4軸( X, Y , Z, θ)です。 (1) X, Y 軸 ヘッド, OCC , HMS (高さ計測装置) , バッドマークセンサの位置を示し, 0.01 mm 単位で X =○ ○○ . ○○ mm , Y =○○○ . ○○ mm で表します。 座標系はソフト上の座標と, ツーリングピン (穴 基準の場合) を基準…
1 - 35
1-2-7.
OCCの名称
OCCの名称OCCの名称
OCCの名称
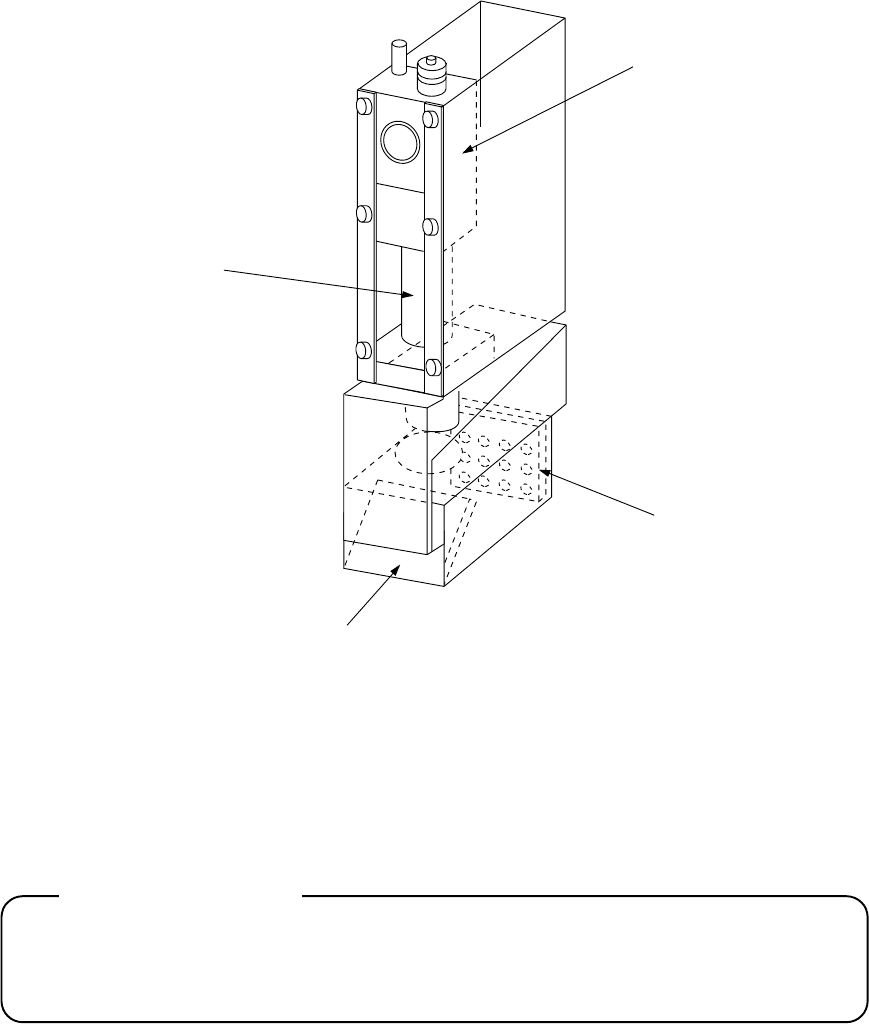
(1) オフセットコレクションカメラ
同軸落射照明と偏光フィルタを標準装備し,カメラにより基板マークの位置を検出し,自動補正し
ます。
① オフセットコレクションカメラ
② OCC レンズ
③ 照明LED基板
④ ミラーボックス
1) キャリブレーションブロックに白色のセラミック基板を載せ、カメラを基板上に移動させます。
2) 止めねじを緩め、フィルタホルダを←→方向に回し、画面が最も明るくなった状態で固定します。
②
①
④
③
偏光フィルタの調整
偏光フィルタの調整偏光フィルタの調整
偏光フィルタの調整
1 - 36
1-3. X, Y, Z 軸の説明
軸の説明軸の説明
軸の説明
本装置で数値制御される軸は以下に示す4軸(
X, Y, Z,
θ)です。
(1) X, Y
軸
ヘッド,
OCC
,
HMS
(高さ計測装置),バッドマークセンサの位置を示し,
0.01 mm
単位で
X
=○
○○
.
○○
mm
,
Y
=○○○
.
○○
mm
で表します。座標系はソフト上の座標と,ツーリングピン(穴
基準の場合)を基準とした座標があります。ソフト上の座標は,ティーチング時の座標で主に吸着
位置を示し,ツーリングピンは,主に搭載位置を示します。
(2) Z
軸
ヘッドのノズル位置を示し,
0.01 mm
単位で
Z
=○○
.
○○
mm
で表します。ノズル先端の基板上
の位置を0とし,上昇方向は+とします。
(3)
θ軸
ヘッドのセンタリング角度を示し,
0.05
°単位で
A
=○○
.
○○ディグリーで表します。反時計方
向の回転を+とし,時計方向と一とします。
図
図図
図
1-3-1
1 - 37
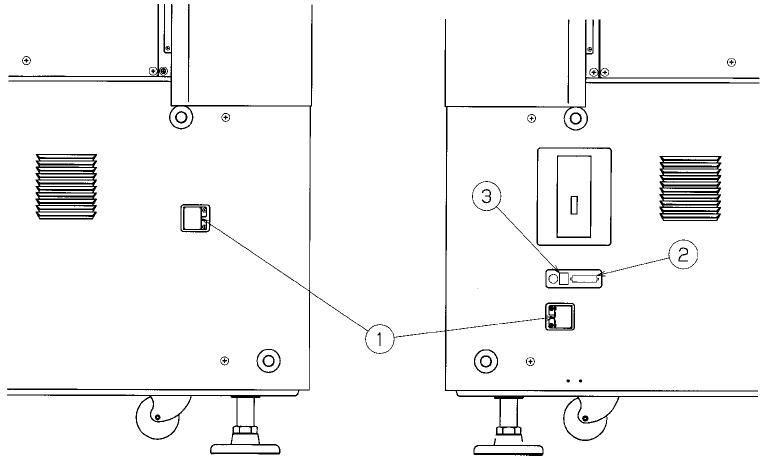
1-4. 外部装置とのインターフェイス
外部装置とのインターフェイス外部装置とのインターフェイス
外部装置とのインターフェイス
(1)
①は,本体装置をオンラインで使用する場合に他の装置と接続するレディアウト(イン)用コネク
タ(
14 pin
)です。
搬送方向が左→右の場合と右→左の場合とでレディアウト(イン)用コネクタのピン配置は表
1-4-1
及び表
1-4-2
参照。
(2)
②は,プリンタ用コネクタ(
Dsub 25 pin
)でセントロニクス方式に準拠しています。
プリンタ用コネクタのピン配置は表
1-4-3
参照。
③は,イーサネットコネクタ(モジュラーコネクタ8P)です。
イーサネットコネクタのピン配置は表
1-4-6
参照。
図
図図
図
1-4-1
本体正面左側
本体正面左側本体正面左側
本体正面左側
図
図図
図
1-4-2
本体正面右側
本体正面右側本体正面右側
本体正面右側