00196497-07_SM_SXDX12_en.pdf - 第264页
Settings Gantry Settings 4.4.3 Checking Track Signals and Zero Pulse 264 Service Manual SIPLACE SX1/SX2/DX1/DX2 FS02 4.4.3 4 . 4 . 3 C h e c k in g T r a c k S ig n a ls a n d Z e r o P u ls e Checking Track Signa ls and…
Settings
4.4.1 Travel Ranges and Speed Monitoring Gantry Settings
Service Manual SIPLACE SX1/SX2/DX1/DX2 FS02 263
4.4
4.4 Gantry Settings
Gantry Settings
See also
5.2.1 Head Interface C700B [03055072-xx] [ ➙ 311]
4.4.1
4.4.1 Travel Ranges and Speed Monitoring
Travel Ranges and Speed Monitoring
The travel range of the X and Y axes will be determined automatically with the help of the software.
4.4.2
4.4.2 Anticrash Function
Anticrash Function
The anticrash function is realized via the GCU software.
4.4.2.1
4.4.2.1 Anticrash Function - Tasks
Anticrash Function - Tasks
▪ Monitoring the X and Y axis travel ranges
Evaluation of the actual position of the respective axis in the direction of the bumper, based on the
speed.
▪ Monitoring the distance of both Y axes in a placement area
Evaluation of the actual position of the own gantry and the partner gantry at gantry crash monitoring.
▪ Count error monitoring of the gantry axis
Monitoring incoming count pulses (edge control) over time.
4.4.2.2
4.4.2.2 Anticrash Function - Procedure
Anticrash Function - Procedure
The anticrash function is activated after the X/Y axes have been referenced. When the gantry axes are
referenced for the first time, anticrash monitoring is not active, which does not matter, due to the low ref-
erence speed.
The bit for the anticrash monitor is then set via the FDB (Fast-Drive-Bus). There is continuous commu-
nication and synchronization via the actual positions of the partner gantry, except in the placement mode
I-Placement. In this case both gantries operate totally independently of one another.
The following information is exchanged between the Y axes:
▪ Actual position and speed of the own gantry
▪ Status information (reference state, anticrash monitoring state ).
4.4.2.3
4.4.2.3 Error "Gantry Crash"
Error "Gantry Crash"
A “gantry crash” error is established by calculating the position difference and speed difference for both
axes. The gantry crash error is reported by the GCU, via the FDB. The servo (GCU) is released for both
axes and both need to be referenced again.
4.4.2.4
4.4.2.4 Count Error:
Count Error:
If the GCU detects a "fatal count error", the axis concerned will be released and the anticrash function
disabled. The other axis is informed of this in the status information and will also disable the anticrash
function. The released axis now needs to be referenced again.
After this, the anticrash function will be re-enabled for both axes.
Settings
Gantry Settings 4.4.3 Checking Track Signals and Zero Pulse
264 Service Manual SIPLACE SX1/SX2/DX1/DX2 FS02
4.4.3
4.4.3 Checking Track Signals and Zero Pulse
Checking Track Signals and Zero Pulse
The zero pulse must be reliably and clearly recognized by the read head. To ensure this, you can check
the analog zero pulse. Electronically controlled settings can not be performed on the incremental length
measurement system.
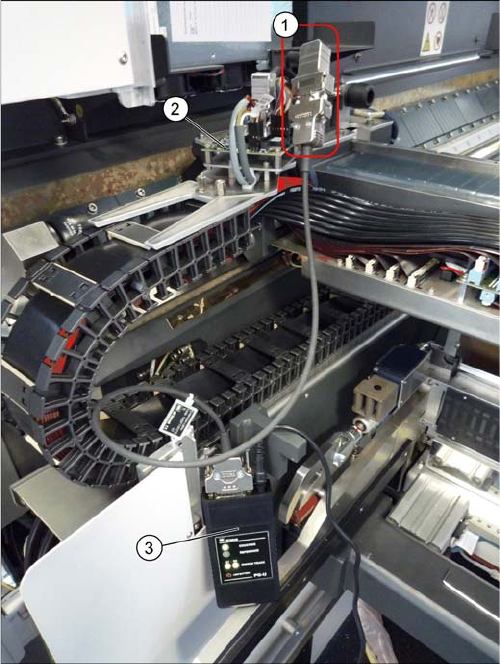
Parts, equipment and tools
▪ Read head test device [03071361-xx]
Check
► Connect the testing device with the signal generator.
To do this, unplug the signal generator from the sen-
sor module and connect it to the testing device.
► Move the axis manually.
Keep an eye on the COUNTING and REFERENCE
LEDs.
⇨ When the setting is correct, the COUNTING LED
should always shine green and the REFERENCE
LED should flash green each time the zero pulse
is passed.
⇨ When the setting is not correct, the COUNTING
LED will shine red and the REFERENCE LED will
be red or orange (orange = just outside the toler-
ance).
Settings
4.4.3 Checking Track Signals and Zero Pulse Gantry Settings
Service Manual SIPLACE SX1/SX2/DX1/DX2 FS02 265
4.4.3.1
4.4.3.1 Track Signals and Zero Pulse
Track Signals and Zero Pulse
SX12?
Checking the connector on the testing device
Check
Proceed as follows to check the zero pulse.
► Switch off the machine.
► Unplug the incremental encoder from the head board or the gantry interface and connect it to the
test device. (See "4.4.3.1.1 Test Device PG1-I (MS22/MS30) [03102699-xx] – Operation" [ ➙ 266])
► Move the head or gantry manually back and forth. This movement enables you to read the correct
track signal progress from the test device.
► If the track signal is not within the tolerance range, you will need to reset the incremental encoder.
The incremental encoder has then been fitted either too near, too far away, inclined and/or displaced.
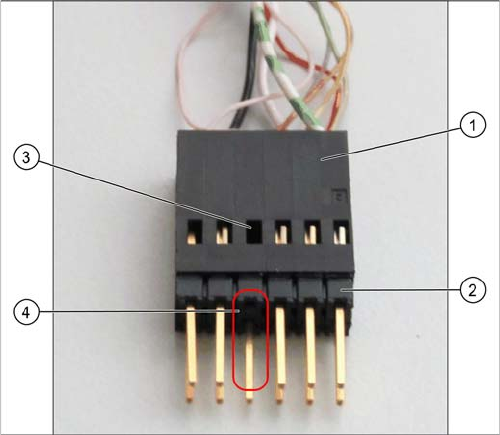
► Make sure that the pin adapter (2) is fitted correctly
on the connector (1) of the testing device.
You should not be able to see any cable in the
opening (3) in place of the missing pin (4).