CP43操作手册.pdf.pdf - 第296页
Chapter 1 T race Mode Part 5 No. 14 Detail All of the graphic functions are displayed along with the details of the data of each function. In this case the trackball is necessary . No. 15 Pause This raises the flag when …
Chapter 1 Trace ModePart 5
No. 4 Line
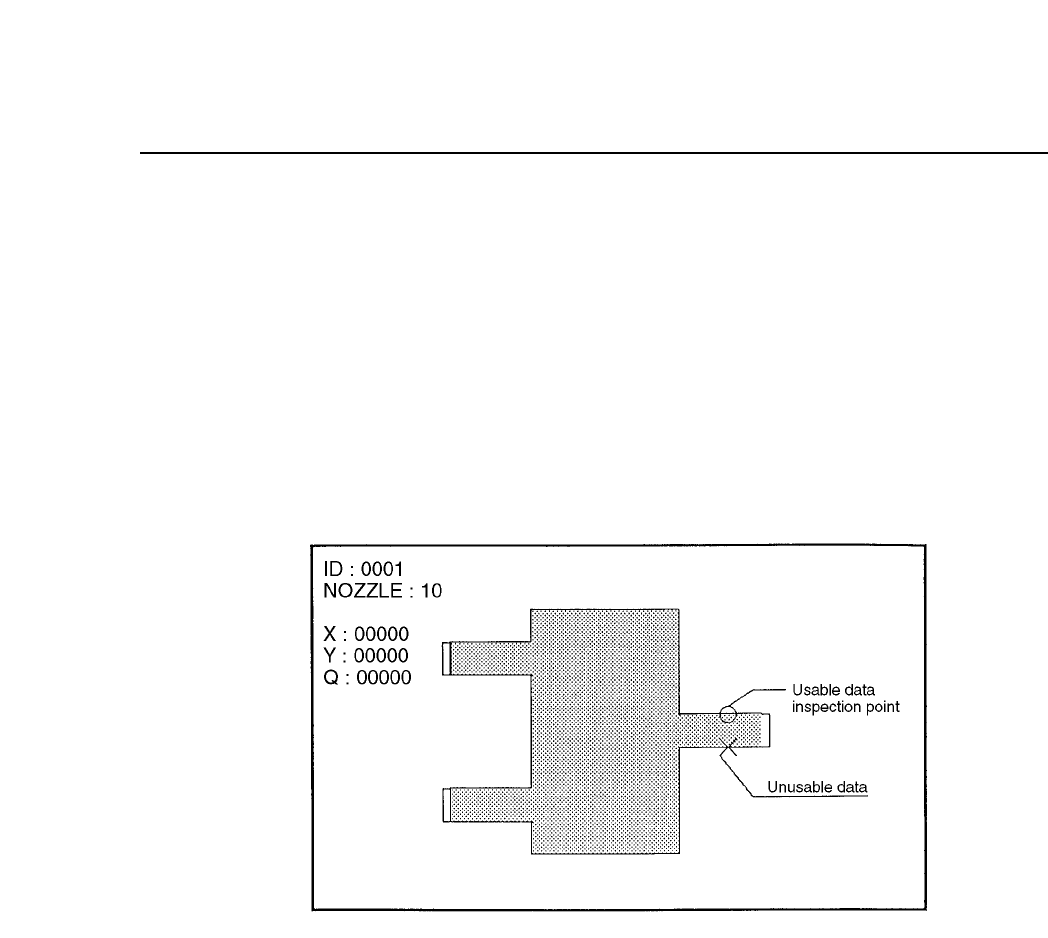
Display of observation points is carried out. For example, if calipers
are used then by searching for the caliper boundaries and using the
boundary points as data, the algorithm will be able to make use of
these observation points to display a graph.
If the observation point that has been found can be used as data
then it will be indicated by an [o] and if the observation point found
is not suitable foe use as data then it will be indicated by an [x].
Observation Point Display Mode
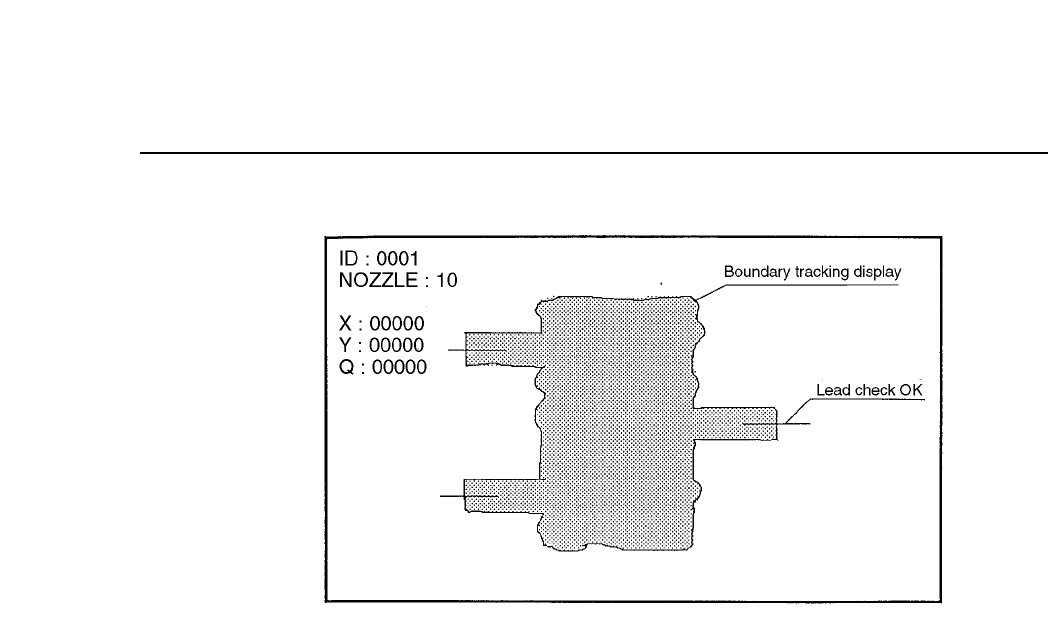
No. 5 Line
Display of the auxilary observation lines is carried out. These
auxilary observation lines can be displayed when seeking to base
these lines on the observation points. In determining the auxilary
observation lines the obsevation points that are used are indicated
by an [o] while the observation points that are not used are
indicated by an [x]. In addition, the results of the angle finder and
the output results of the other essential tools are displayed for
finding the blob center of gravity and the direction of inertia of the
main axis.
No. 13 Color
This is used to change the color of the graphic display to black.
Normally this is not set in which case the display appears in white.
5 – 6Version 2.0
Chapter 1 Trace ModePart 5
No. 14 Detail
All of the graphic functions are displayed along with the details of
the data of each function. In this case the trackball is necessary.
No. 15 Pause
This raises the flag when the trackball is used. When used together
with other functions, this is used for verifying the device process
while these other functions such as zoom in or zoom out are being
used.
No. 24 Clp
This is used for verifying the device process for devices that use
calipers. This function is presently used for SOIC's and when the
frontlight system is used, for PLCC's and SQFP's.
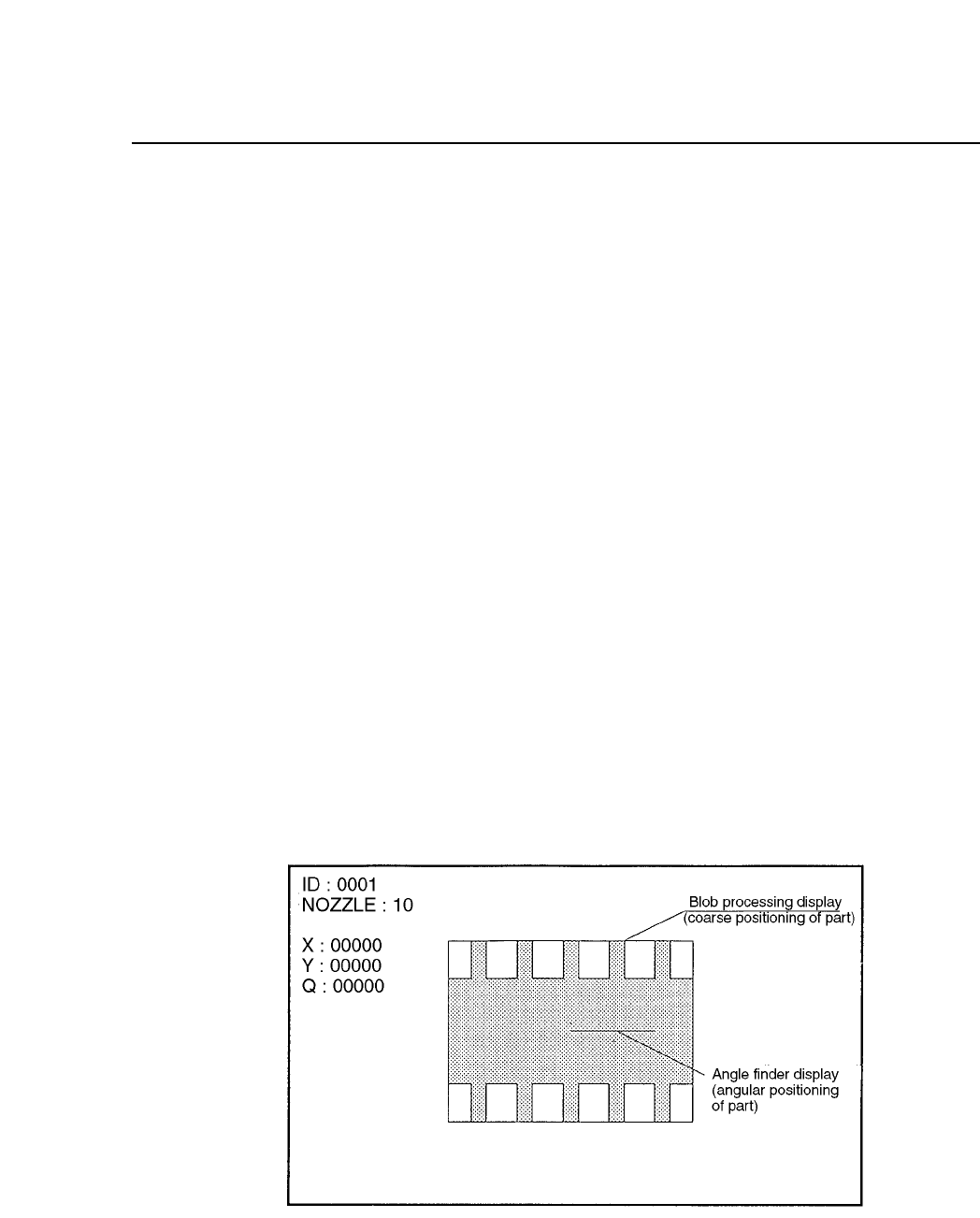
No. 25 Blob
This is used for process verification when the blob function is used.
This function is used for carrying out rough device positioning.
This function is presently used for SOIC's and when the frontlight
system is used, for PLCC's and SQFP's.
No. 26 Agf
This is used when the angle finder carries out detail verification.
This function is used when the angle or corner check is carried out
during vision processing.
5 – 7Version 2.0
Chapter 1 Trace ModePart 5
No. 30 AcqTime
This is used for the timing of acquisition when output is being sent
to a parallel port.
No. 31 InsTime
This is used for the timing of inspection when output is being sent
to a parallel port.
5 – 8Version 2.0