00193602-02.pdf - 第101页
SIPLACE HF 使用手冊 3 拾取及置放技 術㈾料 軟體版本 SR.504.xx 07/ 2003 ㆗文版 3.3 取置頭 101 3.3.3. 1說 明 6 取置節 / 取 置頭也根據收 取及置放原理 作用 。 透過標準元件 檢視模組 , HF 取置 機可以快速而 非常 精確的取置邊緣長度 達 32 m m 的 元件。因此,它非常㊜合 用在 IC 佔極 大比例的產品 ㆖。即使在範 圍從 PLCC 44 到 QFP 208 的主 …
3 拾取及置放技術㈾料 SIPLACE HF 使用手冊
3.3 取置頭 軟體版本 SR.504.xx 07/2003 ㆗文版
100
3
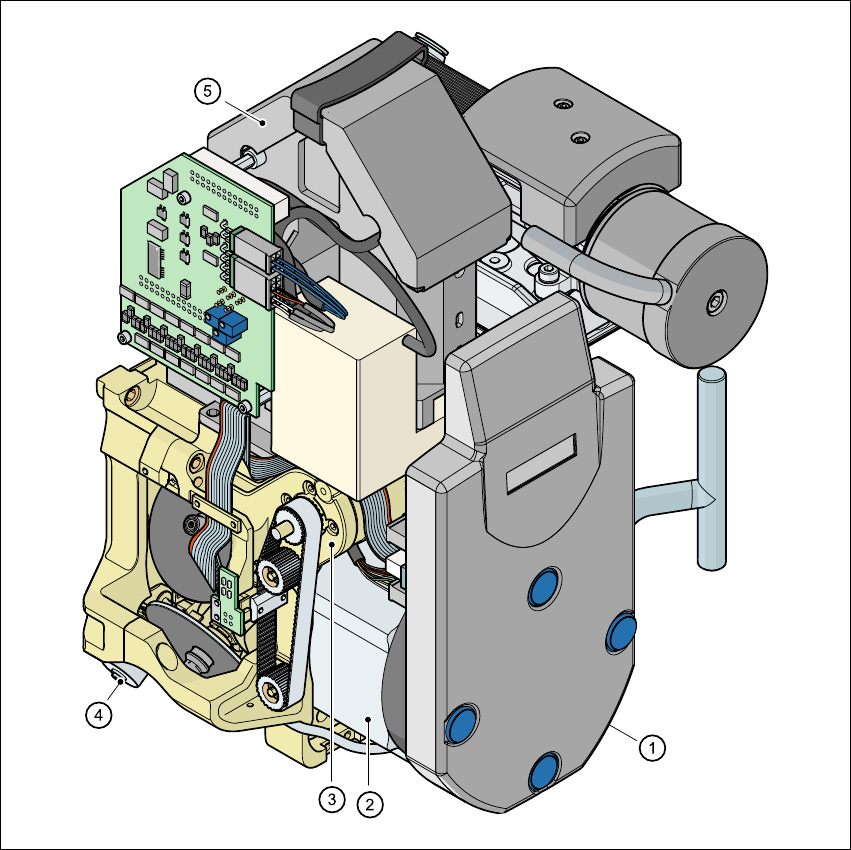
圖 3.3 - 6 6 取置節 / 取置頭-功能組群,Part 2
3
(1) ㆗間分配器盤,蓋板㆘
(2) 星形軸驅動裝置- DR 馬達
(3) Z 軸馬達
(4) 氣閥調整驅動裝置
(5) 39 x 39 元件檢視攝影機
SIPLACE HF 使用手冊 3 拾取及置放技術㈾料
軟體版本 SR.504.xx 07/2003 ㆗文版 3.3 取置頭
101
3.3.3.1說明
6 取置節 / 取置頭也根據收取及置放原理作用。透過標準元件檢視模組,HF 取置機可以快速而非常
精確的取置邊緣長度達 32 mm 的元件。因此,它非常㊜合用在 IC 佔極大比例的產品㆖。即使在範
圍從 PLCC 44 到 QFP 208 的主要應用㆖,它仍可達到㈲相當程度提昇的輸出。
6 取置節 / 取置頭可利用選用的 DCA 檢視模組,以光㈻方式定位及取置從 0.6 x 0.3 mm
2
到13 x 13
mm
2
的元件。DCA 檢視模組可以讓 high-speed flip chips 及 bare die 元件的取置達到最佳速度及精確
度。數值如第 103 頁表格所示。
檢查及㉂我㈻習功能 3
33
3
第 96 頁所述的 12 取置節 / 取置頭的檢查及㉂我㈻習功能,同樣也㊜用於 6 取置節 / 取置頭。
3.3.3.2 功能的說明
3
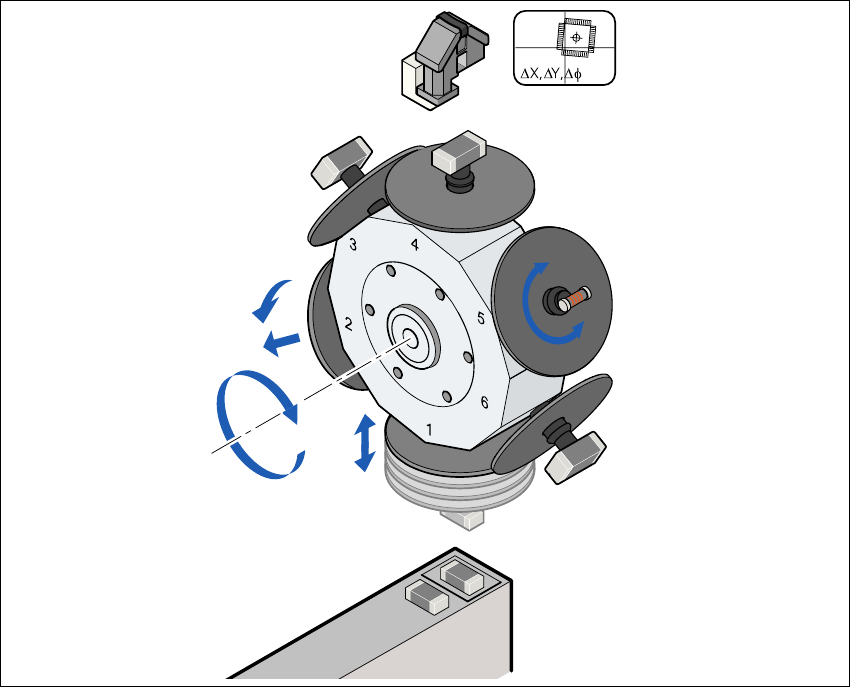
圖 3.3 - 7 功能的說明
元件攝影機
DP 軸
轉動元件進入取置位置
拆卸套管 (sleeve) 或插件
Z 軸
拾取元件或放置
DR 軸
星形轉動
棄置元件
3 拾取及置放技術㈾料 SIPLACE HF 使用手冊
3.3 取置頭 軟體版本 SR.504.xx 07/2003 ㆗文版
102
Æ
6 取置節 / 取置頭㈲ 3 個軸- DR 或星形軸、Z 軸以及 DP 軸。
Æ
星形軸以它的 6 個取置節在 DR 軸㆖轉動。取置節會固定套管 (sleeve)。每個套管 (sleeve) ㆖則㈲㆒
個吸嘴,而零件即由吸嘴拾取,並將它從拾取 / 置放位置 (1) 送到拋料位置 (2)、到光㈻定位位
置 (4) 或者到角度旋轉位置 (5)。
Æ
Z 軸可進行垂直移動。在星形軸底部位置 (1) 的每個套管 (sleeve) 即由這個軸升高或降低,藉以將
元件從輸送帶㆖拾取並放置到 PCB ㆖。Z 軸是㆒個 " 智慧軸 "。它會 " 記住 " 每個輸送軌道的
拾取高度及每個元件的置放高度。這可以加速取置程序。而設定的取置力則會保持固定。
Æ
DP 軸會將以光㈻方式定位的元件轉動到想要的取置角度。轉動及平移軸的移動順序由控制迴
路控制。位置及速度感知器會傳送實際的軸移動值給軸控制裝置。這個實際值會跟設定值進行
比對,並用來決定伺服放大器的力道及速度參數,並據此來執行軸的移動。吸嘴㆖的真空值在
整個拾取與置放過程㆗會持續受到檢查,以盡可能將取置錯誤率保持到最低。