FX-3_Maintenance_Rev2_C.pdf - 第18页
Rev 2.00 维修调整要领书 2-3 14 ) 先拆下空气软管( 6 × φ4 、 4 × φ6 )、 ⑦ 带垫片内六角螺钉 (× 4 ) ,再拆下 SV 支撑装置 A 和电 磁阀。 图 2-1-7 電磁弁(前侧所见) 图 2-1-8 電磁弁(上侧所见) 15 ) 拆下[ NOZZLE-DWN 1 ]及[ NOZZLE-DWN 2 。 ]的传感器连接器 16 ) 从管接头 Y 上拆下除了用于贴装头上升气缸之外的 φ4 空气管。 17…
Rev 2.00
维修调整要领书
2-2
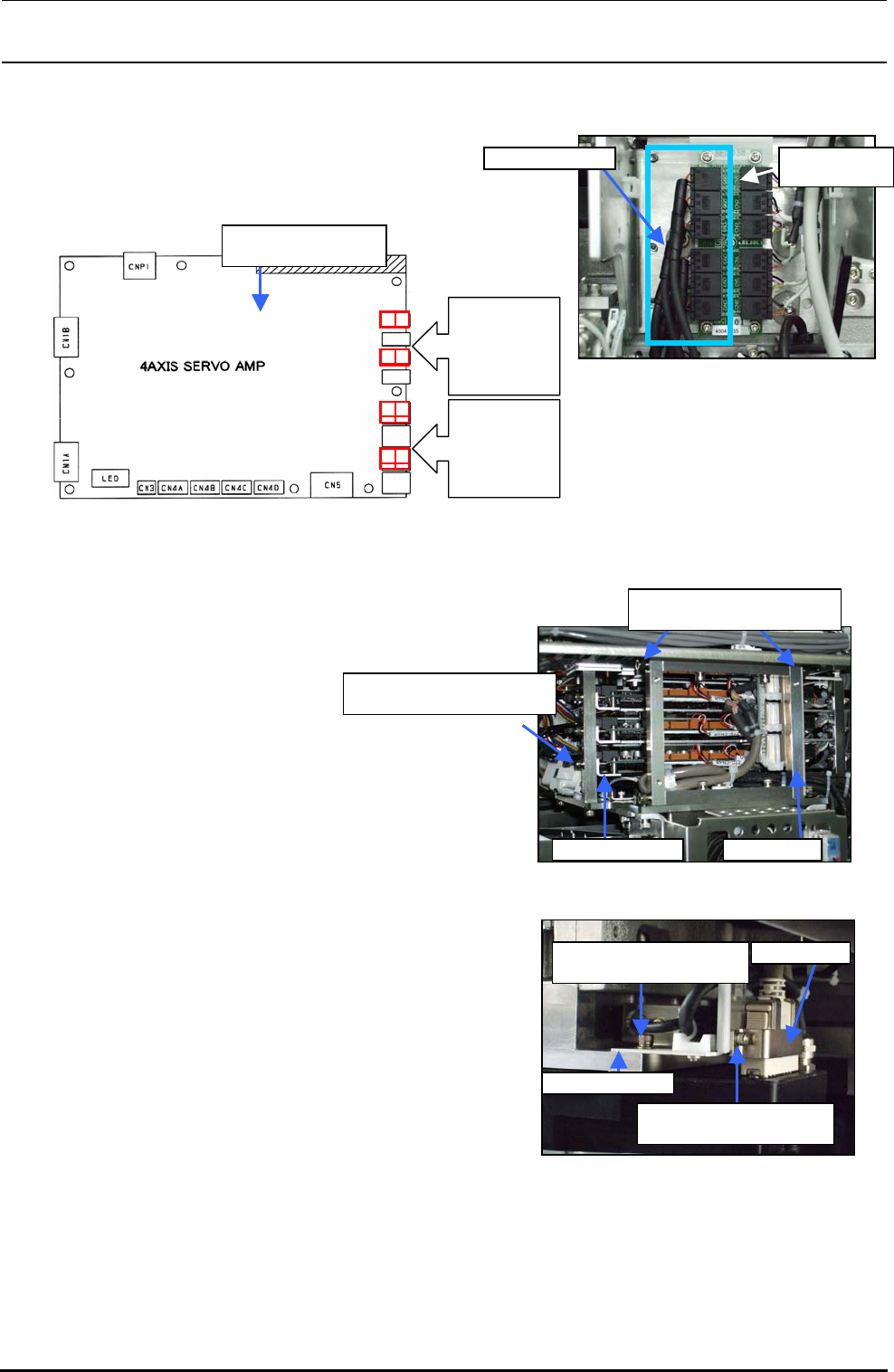
7) 从电动机继电器的电路板上拆下 Z 电动机编码器线。
8) 从 3 块 ZT 驱动器电路板上拆下θ电动机的
连接器(下图网状部分)。(共 12 个)
图 2-1-4 ZT驱动基板
9) 先拆下⑤带垫片内六角螺钉(×4),再 拆 HTP 杆 B
(×2)。
10) 先拆下⑥带垫片内六角螺钉(×2),然后拆下最下
面的 ZT 驱动支撑装置,
拔出θ电动机线。
11) 取下⑦带垫片内六角螺栓 (×2),拆下电缆束线箍。
12) 拆下 LNC60 编码器及 1394 电缆的中继连接器。
13) 拆下⑧带垫片内六角螺栓(×2) ,取下 X 磁尺传感
器托架。
Z 电动机编码器 电动机继电器电
路板
图 2-1-5 ZT驱动基板部
电动机电源电缆
θ(n+1)
Z(n+1)
θ(n)
Z(n)
电动机编码器电缆
θ(n+1)
Z(n+1)
θ(n)
Z(n)
40044535
4 轴整体型伺服放大器
n=贴装头编号
HTP 杆 B ZT 驱动支撑装置
⑤SL6051692TN (×4)
带垫片内六角螺栓 M5×16
⑥SL6042092TN (×2)
带垫片内六角螺栓 M4×20
⑧SL6040892TN (×2)
带垫片内六角螺栓 M4×8
电缆束线箍
⑦SL6030692TN (×2)
带垫片内六角螺栓 M3×6
X 磁尺传感器托架
图 2-1-3 电动机继电器电路板部分
图 2-1-6 LNC60 上部
Rev 2.00
维修调整要领书
2-3
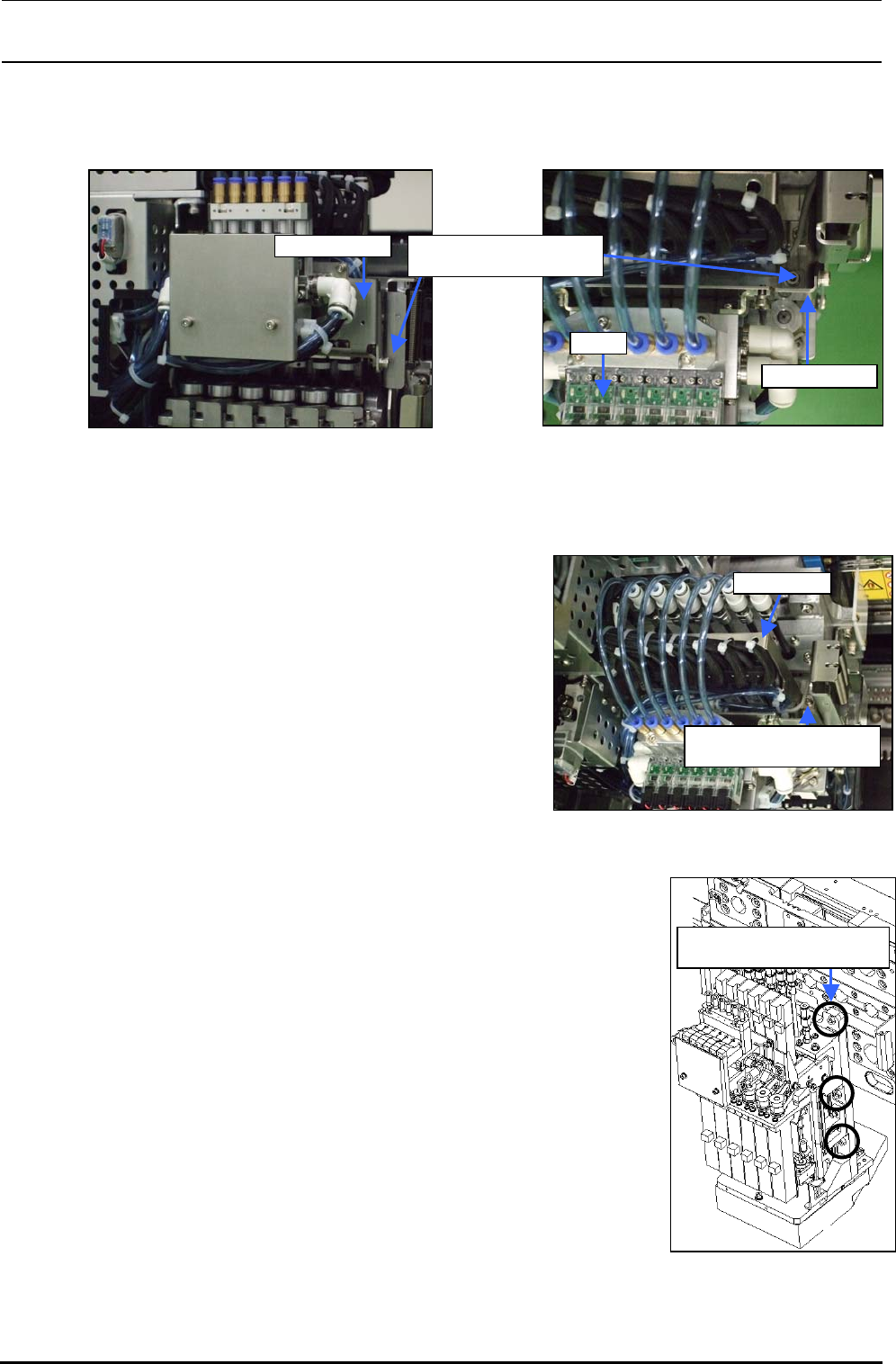
14) 先拆下空气软管(6×φ4、4×φ6)、⑦带垫片内六角螺钉(×4),再拆下 SV 支撑装置 A 和电
磁阀。
图 2-1-7 電磁弁(前侧所见) 图 2-1-8 電磁弁(上侧所见)
15) 拆下[NOZZLE-DWN 1]及[NOZZLE-DWN 2
。
]的传感器连接器
16) 从管接头 Y 上拆下除了用于贴装头上升气缸之外的φ4空气管。
17) 取下⑩止动螺钉(×2),拆下电缆撑架。
18) 为了防止贴装头落下请边用手按住边对⑪带垫片内六
角螺钉(×6)进行拆卸。连同贴装头托架一起拔出 2
根平行销,抬起贴装头将其拆下,抬起时注意不要碰
到其他零件。
图 2-1-9 电缆撑架
19) 装配请按相反的步骤进行。
(图为 LF 贴装头。其他的贴装头也同样进行。)
※ 给⑪贴装头安装螺钉(6 个)涂敷粘结剂 LOCTITE242 后,
请以安装扭矩 7.0N y m 进行固定。
※ 各马达插头请参照下页进行连接。
20) 更换贴装头后,需要重新输入 MS 参数。
输入项目请参照 2-8 项。
图 2-1-10 贴装头装置
電磁弁
SV 支撑装置 A
SV 支撑装置 A
⑨SL6040892TN (×4)
带垫片内六角螺栓 M4×8
电缆撑架
⑩SL6030892TN (×2)
带垫片内六角螺栓 M3×8
⑪SL6052092TN (×6)
带垫片内六角螺栓 M5×20
Rev 2.00
维修调整要领书
2-4
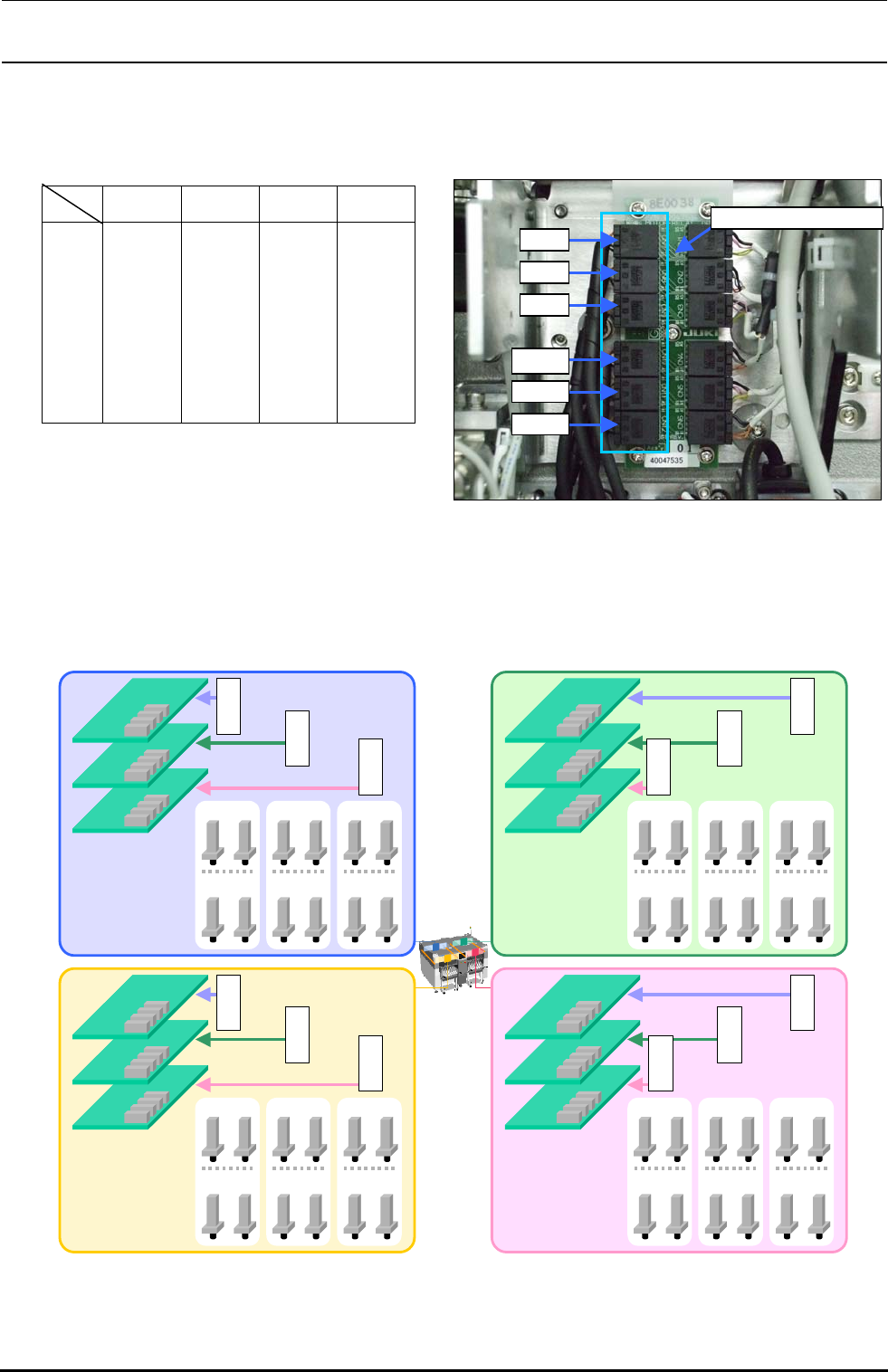
【与电动机继电器电路板连接的 Z 电动机编码器电缆连接器的连接位置】
※ 各连接器以贴装头№记述。
LF 贴装头 RF 贴装头 LR 贴装头 RR 贴装头
CN7
CN8
CN9
CN10
CN11
CN12
L1
L2
L3
L4
L5
L6
L6
L5
L4
L3
L2
L1
L1
L2
L3
L4
L5
L6
L6
L5
L4
L3
L2
L1
※ 与电源插座之中继线连接的 Z 电动机电源电
缆的连接顺序与上述相同。
图 2-1-11 电动机继电器电路板
【与 ZT 驱动器电路板连接的 θ 电动机电缆连接器的连接位置】
※ 各连接器以贴装头№记述。
※ θ电动机电源电缆和θ电动机编码器电缆请参照下图分别连接。
图 2-1-12 从软件上看到的 Z/θ驱动器和电动机配置关系图
CN7
CN8
CN9
CN10
CN11
CN12
电动机继电器电路板
LR
第1軸
第2軸
第3軸
第4軸
θ5 θ6
Z5 Z6
θ3 θ4
Z3 Z4
θ1 θ2
Z1 Z2
θ1
Z1
θ2
Z2
θ3
Z3
θ4
Z4
θ5
Z5
θ6
Z6
LF
第1軸
第2軸
第3軸
第4軸
θ5 θ6
Z5 Z6
θ3 θ4
Z3 Z4
θ1 θ2
Z1 Z2
θ2
Z2
θ1
Z1
θ4
Z4
θ3
Z3
θ6
Z6
θ5
Z5
RR
第1軸
第2軸
第3軸
第4軸
θ5 θ6
Z5 Z6
θ3 θ4
Z3 Z4
θ1 θ2
Z1 Z2
θ5
Z5
θ6
Z6
θ1
Z1
θ2
Z2
θ3
Z3
θ4
Z4
RF
第1軸
第2軸
第3軸
第4軸
θ5 θ6
Z5 Z6
θ3 θ4
Z3 Z4
θ1 θ2
Z1 Z2
θ2
Z2
θ1
Z1
θ4
Z4
θ3
Z3
θ6
Z6
θ5
Z5