FX-3_Maintenance_Rev2_C.pdf - 第21页
Rev 2.00 维修调整要领书 2-6 ② 组装后,请获取 MS 参数的基板上面高度。 如果这一值不在 -2 ~ +2mm 之间,请重新调整 Z 电动机轴与滚珠螺杆的位置关系,再次取得 MS 参 数,并确认基板上面高度在 -2 ~ +2mm 之间。 图 2-2-1-4 Z 电动机编码器和 Z 传感器的位置关系 Z 轴球螺丝转动 1 圈的行程 : 6 m m Z 传感器 OFF 区域 -2 ~ +2mm 稳定区域 Z 传感器 ON 区域…
Rev 2.00
维修调整要领书
2-5
2-2. 马达的更换
2-2-1. Z马达的更换
更换了Z马达之后,需要进行 Z 轴原点的位置调整,以及 Z 轴高度有关、激光有关的 MS 参数。(输入
项目请参照 2-8 项。)
1) 把 Z 电动机扎线从动力插头
底部,Z 编码器中转基板中
拆下。
(参照 2-1 项 2)、4)、5)、
7))
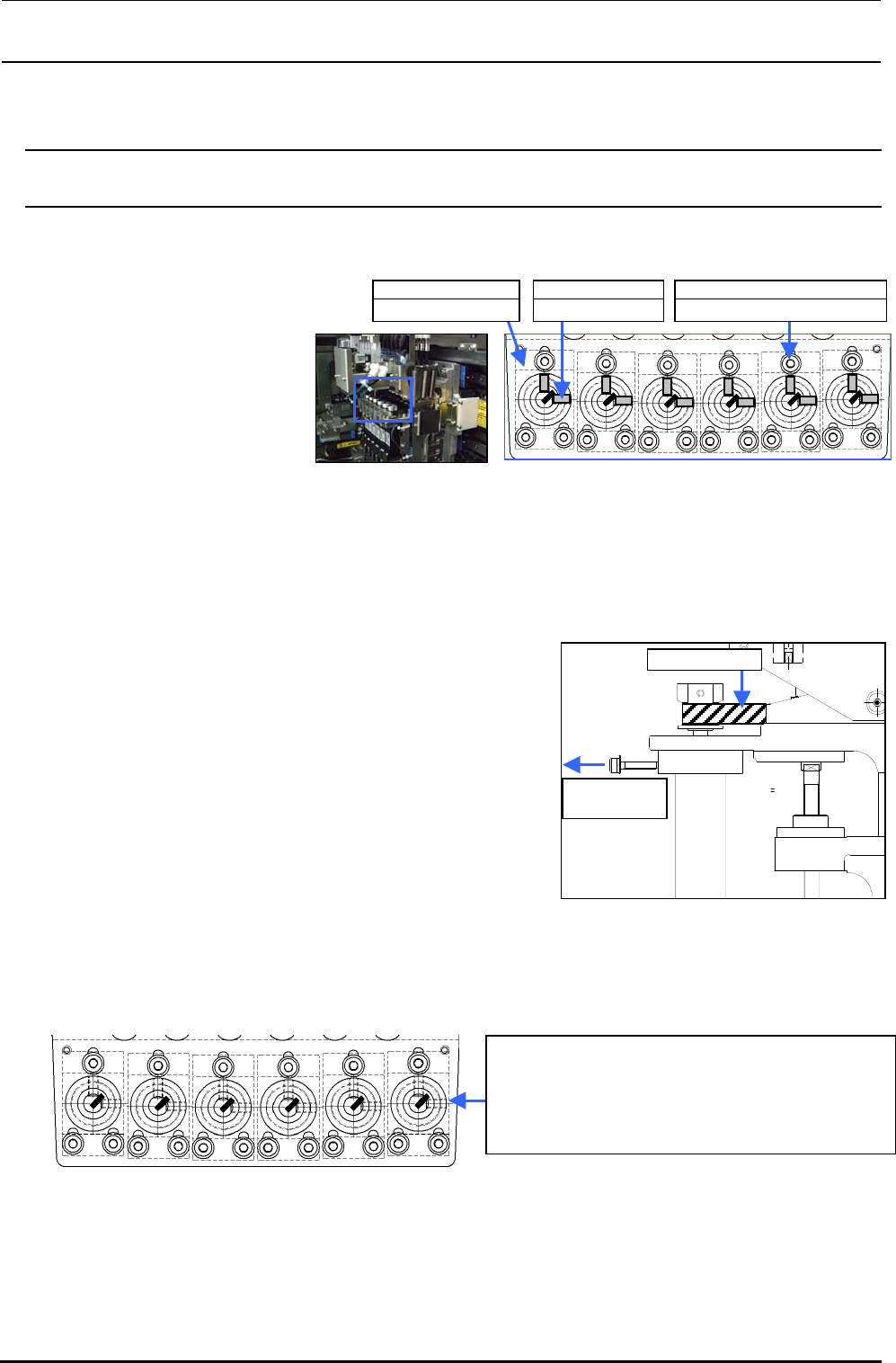
2) 先拧松 Z 电动机皮带轮的①小螺钉(×2)。
3) 先拆下皮带轮安装用的②带垫片内六角螺钉(×3)。然后再边取出皮带轮边拆卸 Z 电动机。
4) 按照相反的顺序进行安装,最后进行皮带张力的调整。
<皮带张力调整步骤>
① 把螺丝插到 Z 马达的螺丝孔,朝箭头方向用杆张力 21.6N
(2.2kgf)的拉力,用安装螺丝固定。
张力计设置值(设计值)
• 张力计输入值
Weight:0.9g/m、Width:8.0mm、Span:45mm
• 规格值: 10.5±1N
※ 在 Z 马达安装螺丝(3 个)上涂上锁定漆 242 后,拧紧固
定,转矩为 2.3N y m。
※ 固定 Z 马达皮带轮的固定螺丝时,
应注意 Z 马达轴的平部和皮带轮固定螺丝的方向。固定螺丝的紧
固转矩为 0.5N y m。
图 2-2-1-3 Z 电动机皮带轮的组装方法
图 2-2-1-1 Z电动机组装部(俯视图)
①SM8030312TP
止动螺钉 M3
②SL6031692TN
带垫片内六角螺栓 M3×16
40044534
伺服电动机 30W(Z 轴)
同步皮带 Z
21.6N (2.2kgf)
拉
在将 Z 轴抬到最上面的状态下,如果按左图所示,
在轴标记为 2 点钟方向的位置或者轴的 D 形切面
为图示的位置时将 Z 马达皮带轮固定,即达到 2)
项的条件。
Rev 2.00
维修调整要领书
2-6
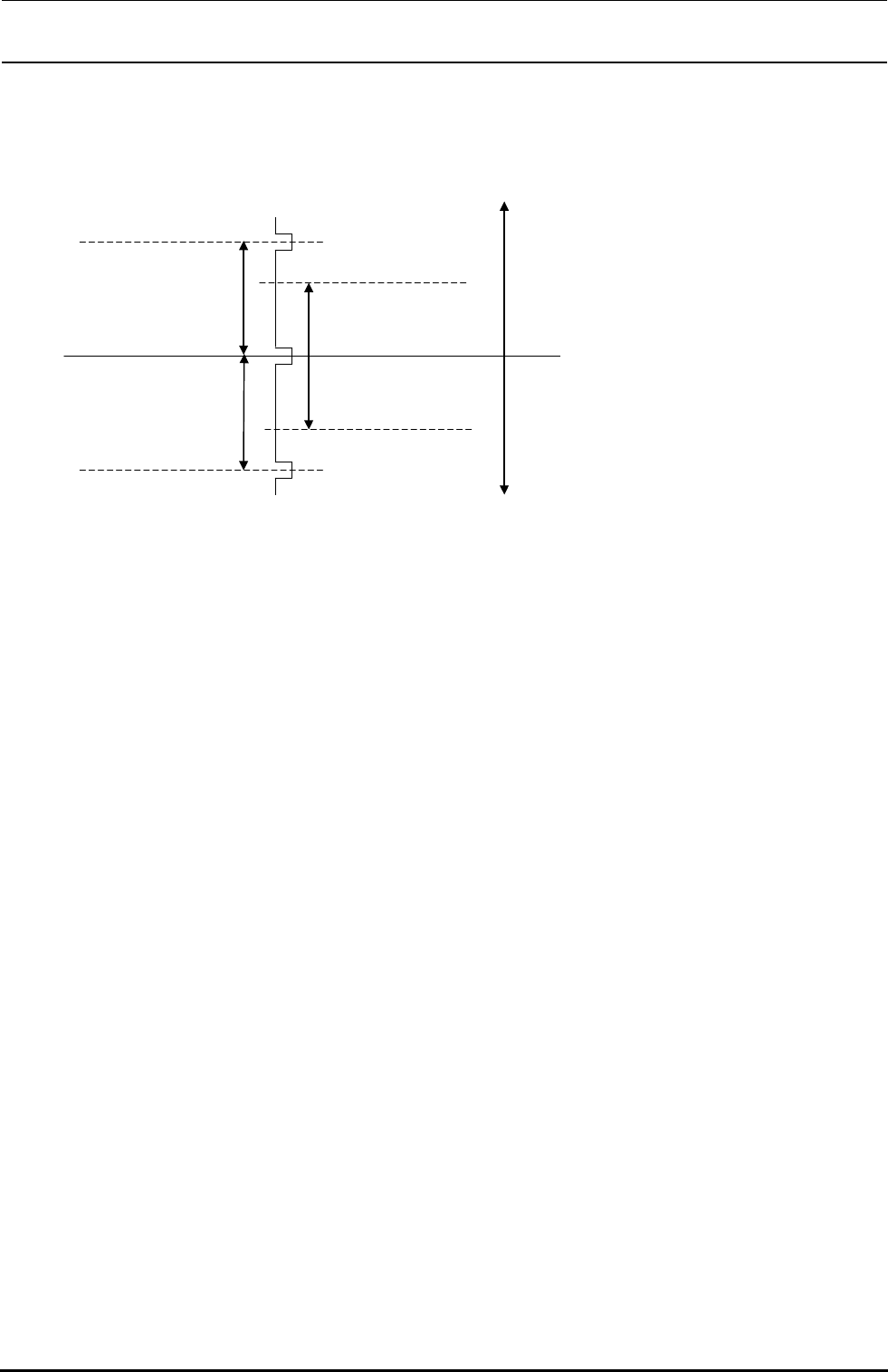
② 组装后,请获取 MS 参数的基板上面高度。
如果这一值不在-2~+2mm 之间,请重新调整 Z 电动机轴与滚珠螺杆的位置关系,再次取得 MS 参
数,并确认基板上面高度在-2~+2mm 之间。
图 2-2-1-4 Z 电动机编码器和 Z 传感器的位置关系
Z 轴球螺丝转动
1 圈的行程: 6mm
Z 传感器 OFF 区域
-2~+2mm 稳定区域
Z 传感器 ON 区域
Z 传感器高度
θ电动
机
编码器 Z 相
Rev 2.00
维修调整要领书
2-7
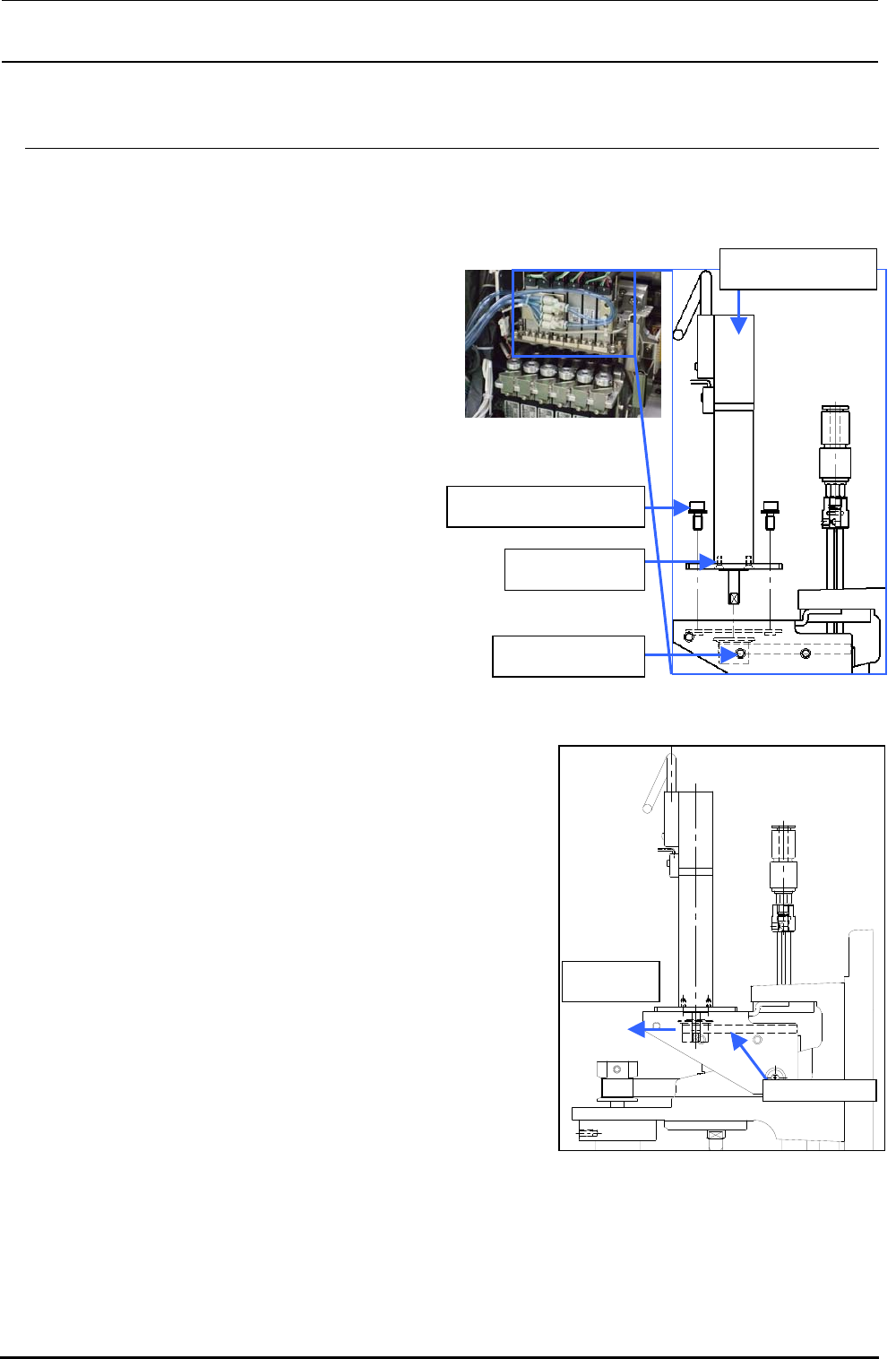
图 2-2-2-1 θ 马达
2-2-2. θ马达的更换
更换马达之后,需要重新输入有关轴原点的 MS 参数。
(输入项目请参照 2-8 项。)
1) 从伺服放大器电路板上拆下马达线束。
(参照 2-1 项 2)、3)、8)、9)、10))
2) 先松开 T 皮带轮的止动螺钉①(小螺钉(×
2))。
3) 拆下马达的安装螺钉②(带垫片内六角螺
钉(×2)),拔出皮带轮同时卸下马达。
4) 卸下埋头螺钉③((×2),拆下 TM 法兰
盘。
5) 装配请按相反的步骤进行。
※ 给③埋头螺钉涂敷粘结剂 LOCTITE242 后,
请以安装扭矩 0.14N y m 进行固定。
6) 请按以下步骤调整皮带张力。
<皮带张力调整步骤>
① 在 θ 马达的 T 链轮前端,用束线箍或皮带等做一个圈,挂
上拉力棒,在拉到 12.7N(1.3kgf)的状态下用安装螺丝固
定。
张力计设置值(设计值)
• 张力计输入值
We
ight:0.9g/m、Width:4.0mm、Span:73mm
• 规格值: 6.5±1N
※ 在 θ 马达安装螺丝(2 个)上涂上锁定漆 242 后,拧紧固
定,转矩为 2.3N y m。
※ 固定 T 皮带轮的固定螺丝时,应注意 θ 马达轴的平部和皮
带轮固定螺丝的方向。固定螺丝的紧固转矩为 0.5N y m。
图 2-2-2-2 θ电动机皮带张力调整
①SM8030312TP
止动螺钉 M3 L=3
③SM1020501SC
埋头螺钉 M2 L=5
40044533
伺服电动机 10W(θ 轴)
②SL6030842TN
带垫片内六角螺栓 M3×8
同步皮带 T
12.7N(1.3kgf)
拉