JM-100使用说明书 - 第400页
第 1 部 基本篇 第 4 章 制作生产程序 4- 87 6) 弯脚固定 方法 选择 弯脚固定 的动 作方法 。 项目 概要 从朝外到朝内 通过 弯脚固定 爪 的关闭 动作进行 弯脚固定。 从朝内到朝外 通过 弯脚固定 爪 的打开 动作进行 弯脚固定。 左旋转 通过 弯脚固定 爪的 旋转 动作进行弯脚固定 。 ( 逆时针旋转 ) 右旋转 通过 弯脚固定 爪的 旋转 动作进行弯脚固定 。 ( 顺时针旋转 ) 7) 爪速度 从高速、中速、 …
第 1 部 基本篇 第 4 章 制作生产程序
4-86
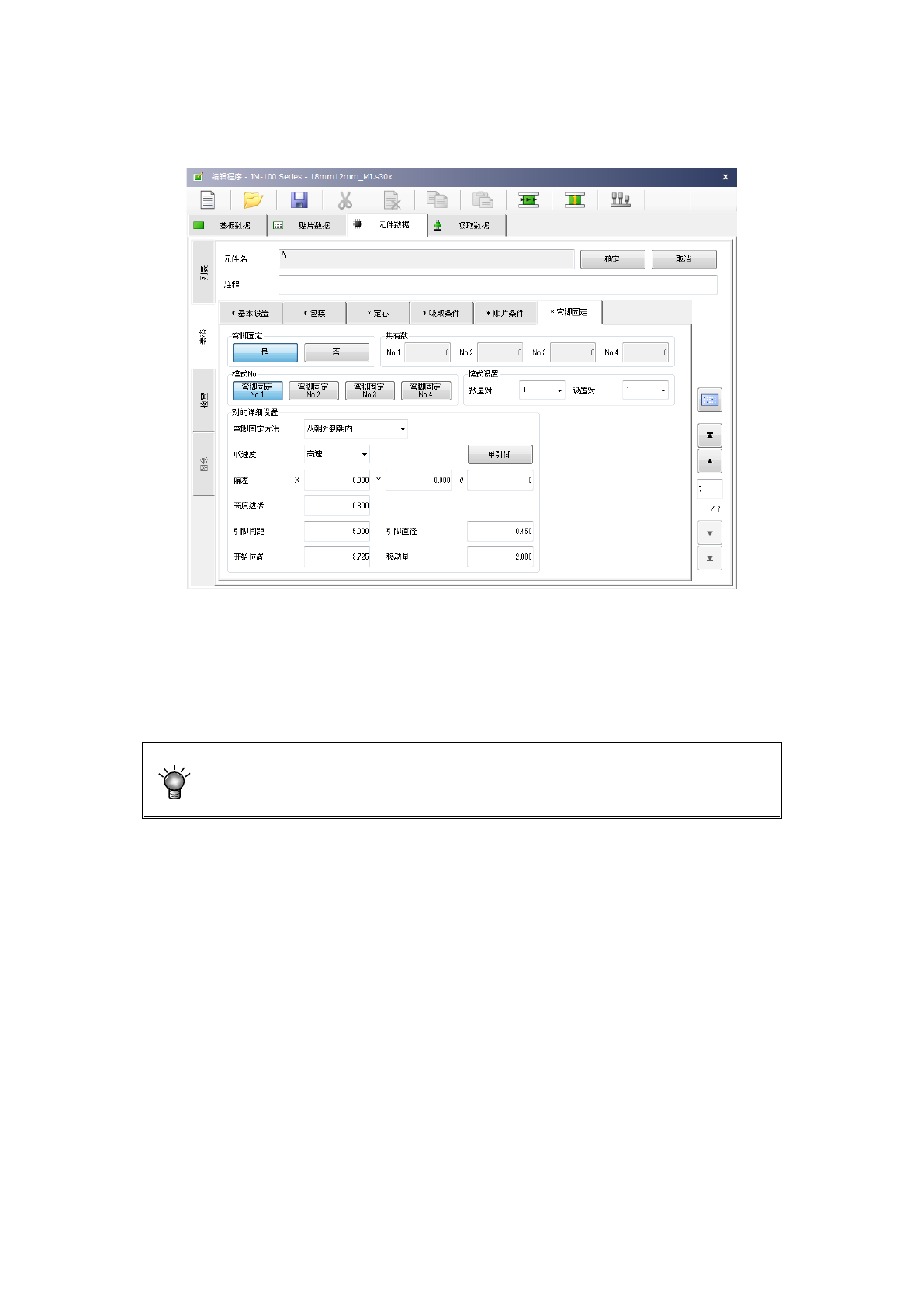
(6) 弯脚固定
弯脚固定是有关贴片时弯脚固定动作的设定项目,适用初始值,但请根据元件的形状和希望动作的条
件确认和变更设定。
1) 弯脚固定
选择在贴片时实施/不实施弯脚固定动作。
仅「插入元件」、「 INS 电解电容器」、「 其他元件」可以设定。
为可以设定的元件时,初始值为「实施」。
即使在贴片数据选择「弯脚固定 No.*」,如果元件种类为对象外,或者在本设
定中设为「不实施」时,则在贴片时不实施弯脚固定动作。
2) 共有数
显示参照各类型贴片数据的点数。无法进行编辑。
3) 模式 No.
从 1~4 中选择显示和设定的类型。
4) 数量对
对选定的类型,设定执行弯脚固定动作的对数。
初始值为 1,可从 1~10 进行选择。
5) 设置对
对设置的对数,选择要进行显示和设置的对。
第 1 部 基本篇 第 4 章 制作生产程序
4-87
6) 弯脚固定方法
选择弯脚固定的动作方法。
项目
概要
从朝外到朝内
通过弯脚固定爪的关闭动作进行弯脚固定。
从朝内到朝外
通过弯脚固定爪的打开动作进行弯脚固定。
左旋转
通过弯脚固定爪的旋转动作进行弯脚固定。
(
逆时针旋转
)
右旋转
通过弯脚固定爪的旋转动作进行弯脚固定。
(
顺时针旋转
)
7) 爪速度
从高速、中速、低速选择弯脚固定动作时的爪速度。
8) 偏查 X、Y、θ
偏差 XY 设定为从元件中心看时的弯脚固定位置偏差。
θ设定为从弯脚固定位置看时的引脚位置角度。
9) 高度边缘
设定弯脚固定后距离引脚下端的边缘。
在从基板下面开始下降引脚直径与高度边缘的位置,实施弯脚固定动作。
10) 引脚间距
输入引脚中心间的距离。
11) 引脚直径
输入引脚的直径。
12) 开始位置
设定弯脚固定动作开始时的爪位置。
根据弯脚固定方法、引脚间距、引脚直径计算初始值。
弯脚固定方法为从朝外到朝内时,输入从弯脚固定单元中心到动作开始前打开的爪内侧的距离,
从朝内到朝外时,输入从弯脚固定单元中心到爪外侧的距离,左旋转、右旋转时,输入爪侧面与
接触到引脚的距离。
13) 移动量
设定弯脚固定动作时的爪移动量。
根据弯脚固定方法、开始位置计算初始值。
通过距离换算输入各量,弯脚固定方法为从朝外到朝内时为爪的关闭量,从朝内到朝外时为爪的
打开量,左旋转、右旋转时为爪侧面与引脚接触后的旋转量。
第 1 部 基本篇 第 4 章 制作生产程序
4-88
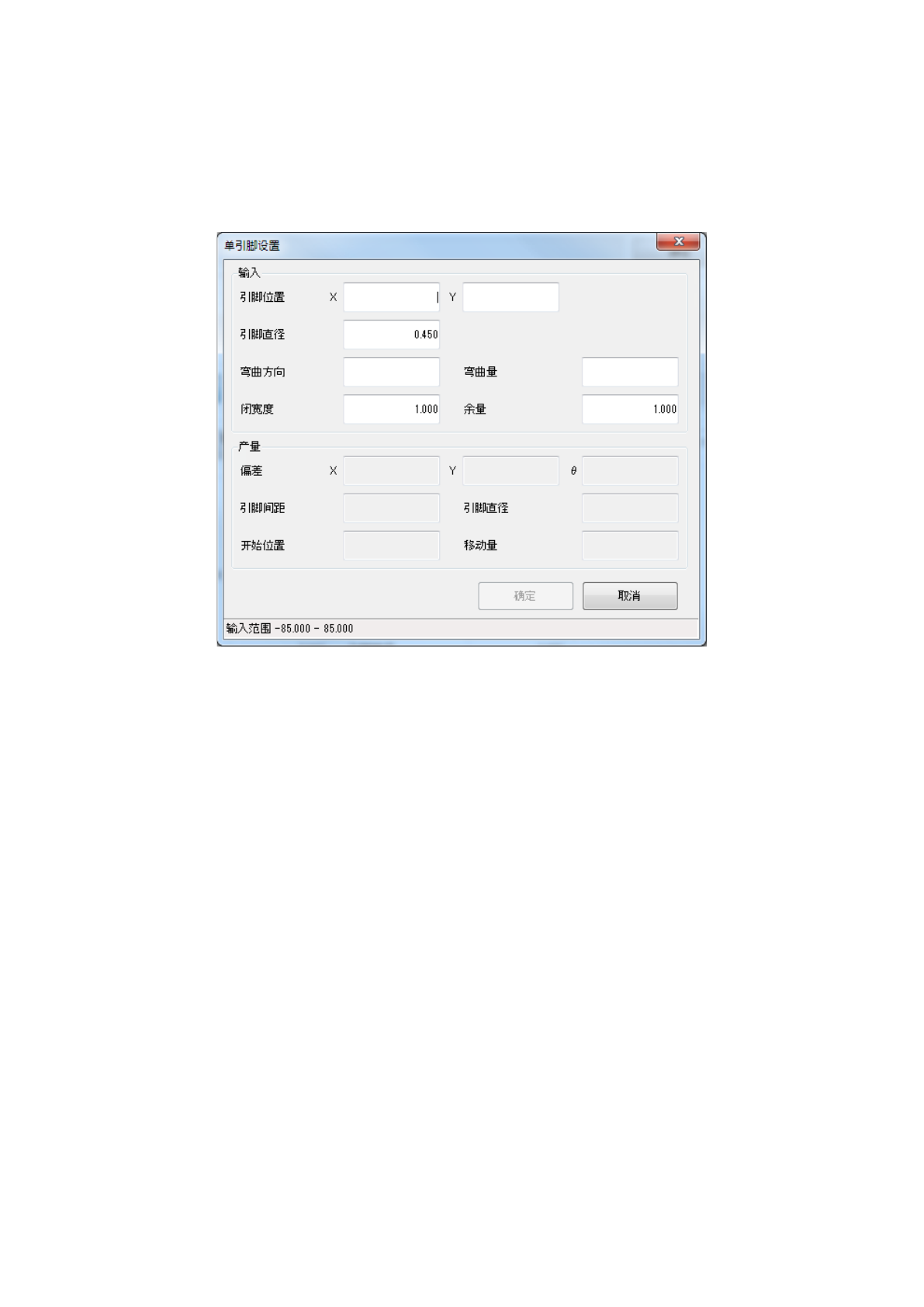
14) 单引脚
按下按钮则显示以下画面。
可以根据 1 根引脚的位置自动计算出设定项目。但与爪速度、高度边缘无关。
弯脚固定方法为「从朝外到朝内弯曲」、「 从朝内到朝外弯曲」时,单引脚按钮可以按下,计算方
法改变。在程序中不保存计算所使用的输入项目。
① 引脚位置 X、Y
以元件中心为基准输入引脚中心位置。
② 引脚直径
输入引脚的直径。
初始值为打开画面前的弯脚固定选项卡的引脚直径。
③ 弯曲方向
输入引脚的弯曲方向。
④ 弯曲量
弯脚固定动作时,输入与引脚接触后的移动宽度。
⑤ 闭宽度
输入弯脚固定动作中爪关闭状态时的宽度。
※ ①~⑤全部为输入状态时,在输出项目中显示计算结果。
仅全部结果在可设定的范围内时,可以按下确定按钮。
⑥ 确定
关闭画面,将输出内容反映到弯脚固定选项卡的设定内容中。
⑦ 取消
关闭画面。则废弃全部的输入输出内容。