JM-100使用说明书 - 第814页
第 2 部 功能详解篇 第 11 章 选项组件 11 - 30 ○ 旋转 (左 旋转 ) 開始位置 リード径 リードピッチ 移動量 ○ 单引脚 開始位置 移動量 リード径 リードピッチ /2 閉時幅 リード位置 X 曲げ方向 曲げ量 开始位置 引脚间距 引脚直径 移动量 引脚直径 引脚位置 X
第 2 部 功能详解篇 第 11 章 选项组件
11-29
11-7-2 机器设置
对是否使用弯脚固定单元,以及有无基板支撑功能、安装爪进行设置。
有关详细,请参照「第 07 章_机器设置」的「7-3-1-2 基本」、「 7-3-6-4 弯脚固定单元设置」。
11-7-3 程序编辑
对生产中的弯脚固定动作、基板支撑进行设置。有关参数的设置,请参照「第 04 章_制作生产程序」
的「4-3-4 制作贴片数据」、「 4-3-5 元件数据」。
关于单引脚,请参见附录「弯脚固定补充」。
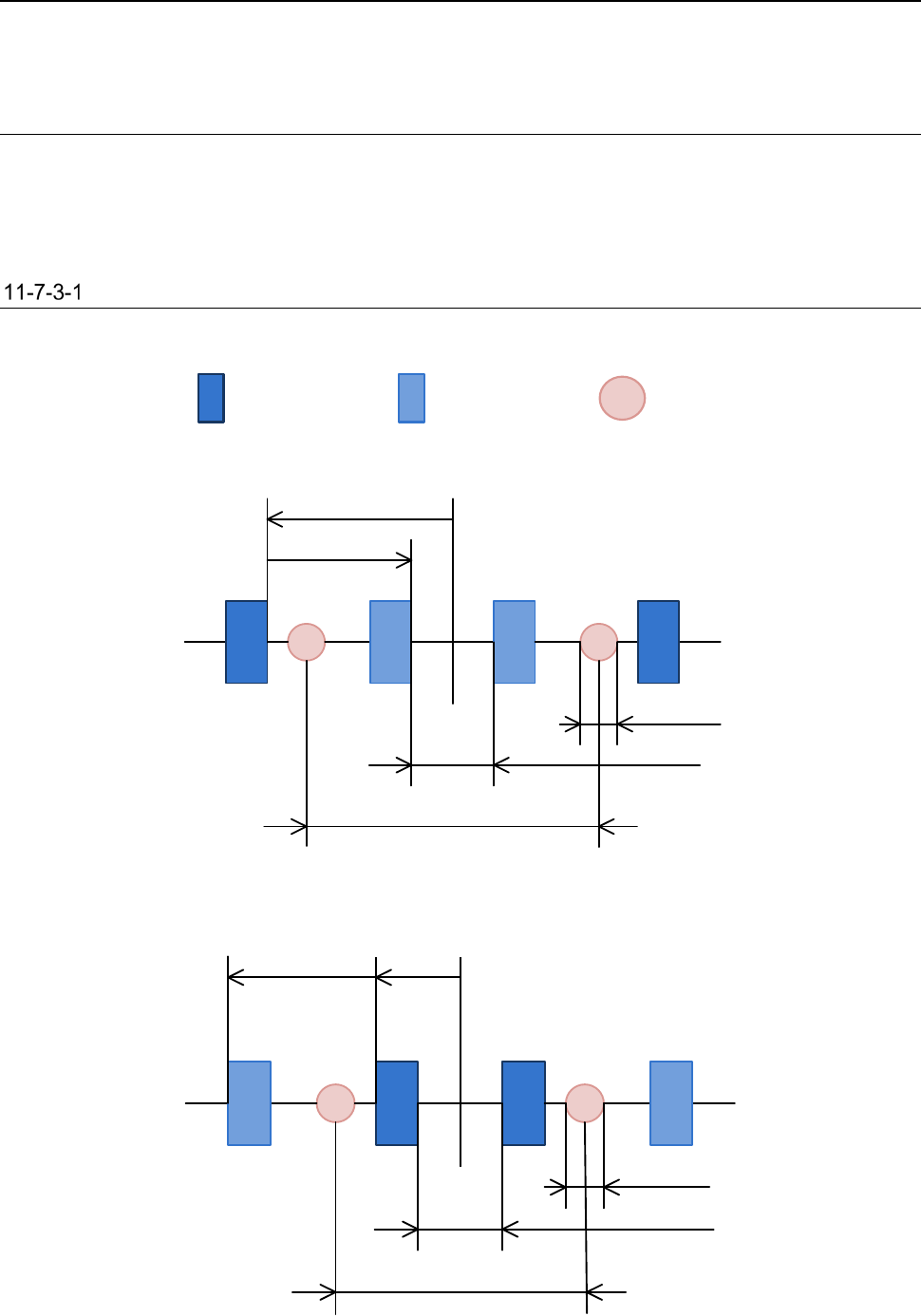
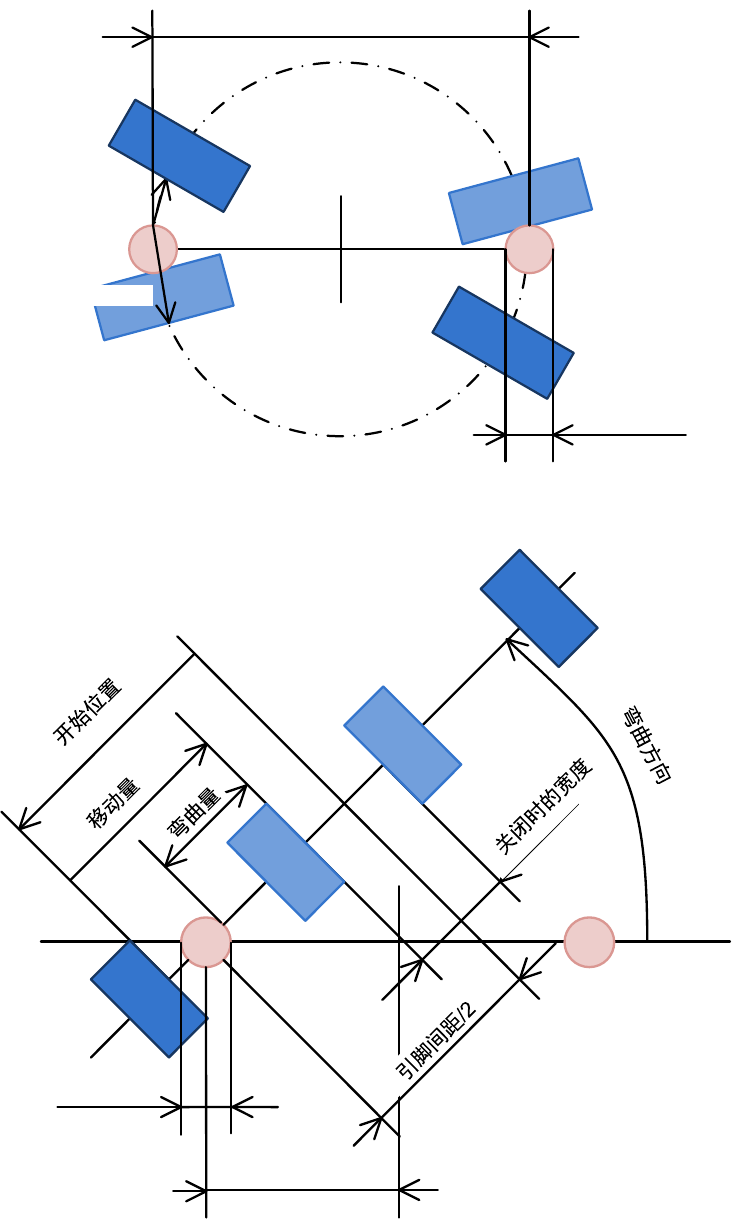
弯曲图示
弯曲动作图如下所示。
動作前の
クロー位置
動作後の
クロー位置
リード
○ 从朝外到朝内(内弯曲)
開始位置
移動量
リード径
リードピッチ
閉時幅
○ 从朝内到朝外(外弯曲)
開始位置
移動量
リード径
リードピッチ
閉時幅
动作前的
爪位置
动作后的
爪位置
引脚
开始位置
移动量
引脚间距
引脚直径
关闭时的宽度
开始位置
移动量
引脚间距
引脚直径
关闭时的宽度
第 2 部 功能详解篇 第 11 章 选项组件
11-30
○ 旋转(左旋转)
開始位置
リード径
リードピッチ
移動量
○ 单引脚
開始位置
移動量
リード径
リードピッチ/2
閉時幅
リード位置X
曲げ方向
曲げ量
开始位置
引脚间距
引脚直径
移动量
引脚直径
引脚位置
X
第 2 部 功能详解篇 第 11 章 选项组件
11-31
11-7-4 生产
根据设置的弯脚固定动作参数,实 施 弯脚固定/基板支撑动作。有关详细,请参照「第 02 章_生产」。
弯脚固定动作中紧急停止
弯脚固定动作中发生紧急停止时,在未完成弯脚固定的状态下生产异常结束。
希望在该贴片点完成弯脚固定动作时,取下未完成弯脚固定的元件,选择实施贴片追踪的「未贴片」
后,开始生产。
有关详细,请参照「第 02 章_生产」的「2-11-2 确认贴片点」「 2-13-3 继续生产」。
11-7-5 手动控制
执行弯脚固定轴的个别动作及弯脚固定动作、基 板 支撑动作。有关详细,请参照「第 08 章_手动控制」
的「8-6-8 弯脚固定单元控制」。
11-7-6 装置运行信息
可以参照弯脚固定单元各马达的运行实绩。有关详细,请参照「第 09 章_设备运行信息」。
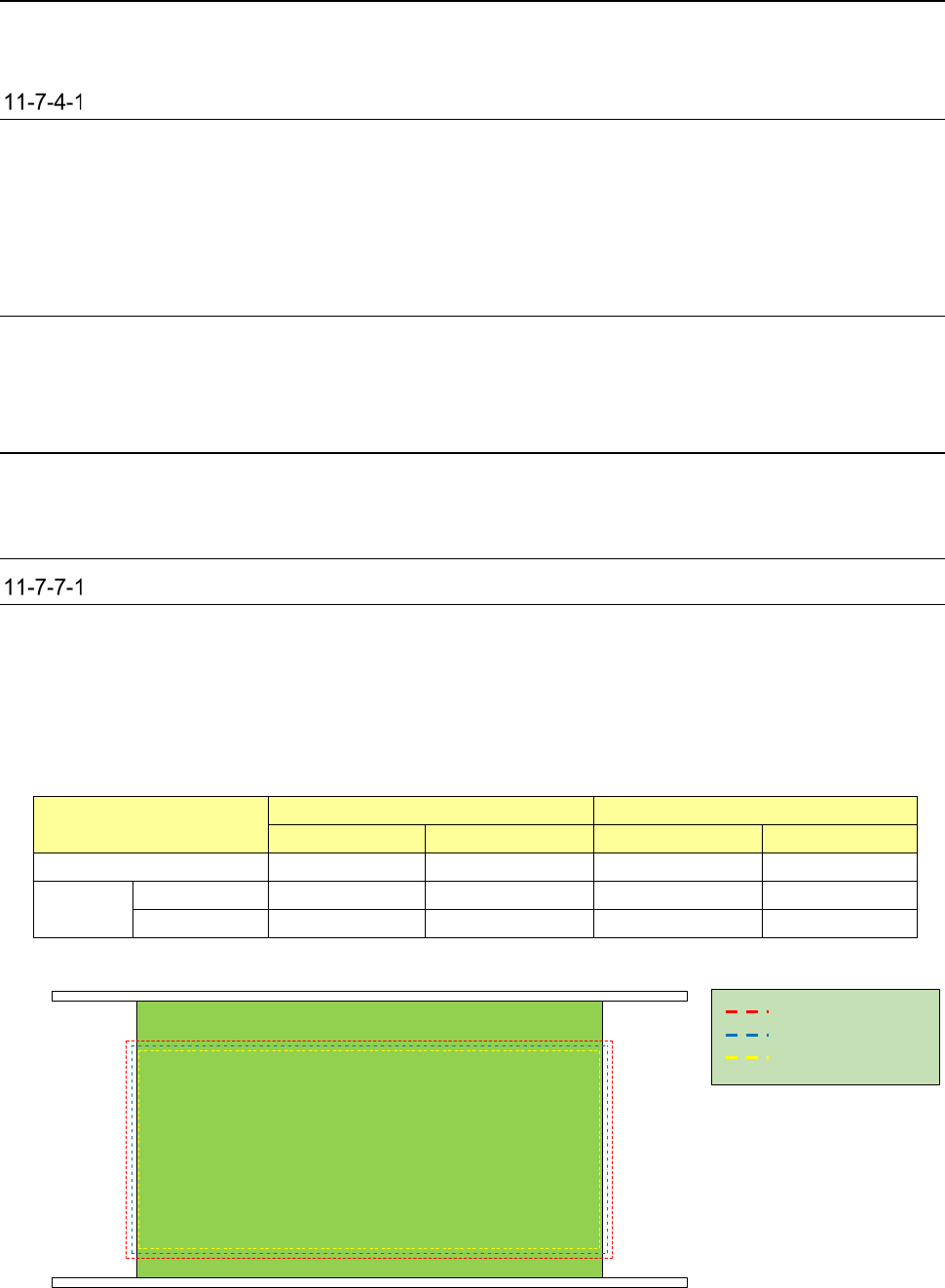
11-7-7 弯脚固定单元的限制事项
弯脚固定可能区域
弯脚固定动作、基板支撑动作需要设置在弯脚固定可能区域范围内。
根据基板的 Y 方向尺寸和有无 3D 传感器,弯脚固定可能区域会有所变化。
11-7-7-1-1 弯脚固定可能区域(最大基板尺寸时)
基板尺寸为 410×360mm 时如下表所示。
XY 方向
0
°/
180
°
0
°/
180
°以外
负向方向
正向方向
负向方向
正向方向
X
方向
1mm
以上
409mm
以下
1mm
以上
409mm
以下
Y 方向
无
3D
传感器
16mm
以上
341mm
以下
29.5mm
以上
331mm
以下
有
3D
传感器
16mm
以上
301mm
以下
29.5mm
以上
301mm
以下
※ 基板左下端为基准时
メカリミット
ソフトリミット
クリンチ可能範囲
机械极限
软极限
弯脚固定可能范围