JM-100使用说明书 - 第895页
附录 弯脚固定补充 B- 25 在 5 .3 章 的示例 中 ,将 引脚 A 、 引脚 C 、引脚 E 的弯脚固定 方法设定 为「从朝外到 朝内」。 弯脚固定方为「从朝外到朝内」时的输出 值,与「从朝内到朝外」 时的输出值的偏差 X 、 Y 、θ 值 (= 弯脚 固定头中心位置 ) ,如下表所示。 从朝外到朝内 从朝内到朝外 X Y θ X Y θ 引脚 A 8 8.75 90 8 2.5 90 引脚 C - 8 8.75 90 - 8…
附录 弯脚固定补充
B-24
5.4 弯脚固定方法的选择
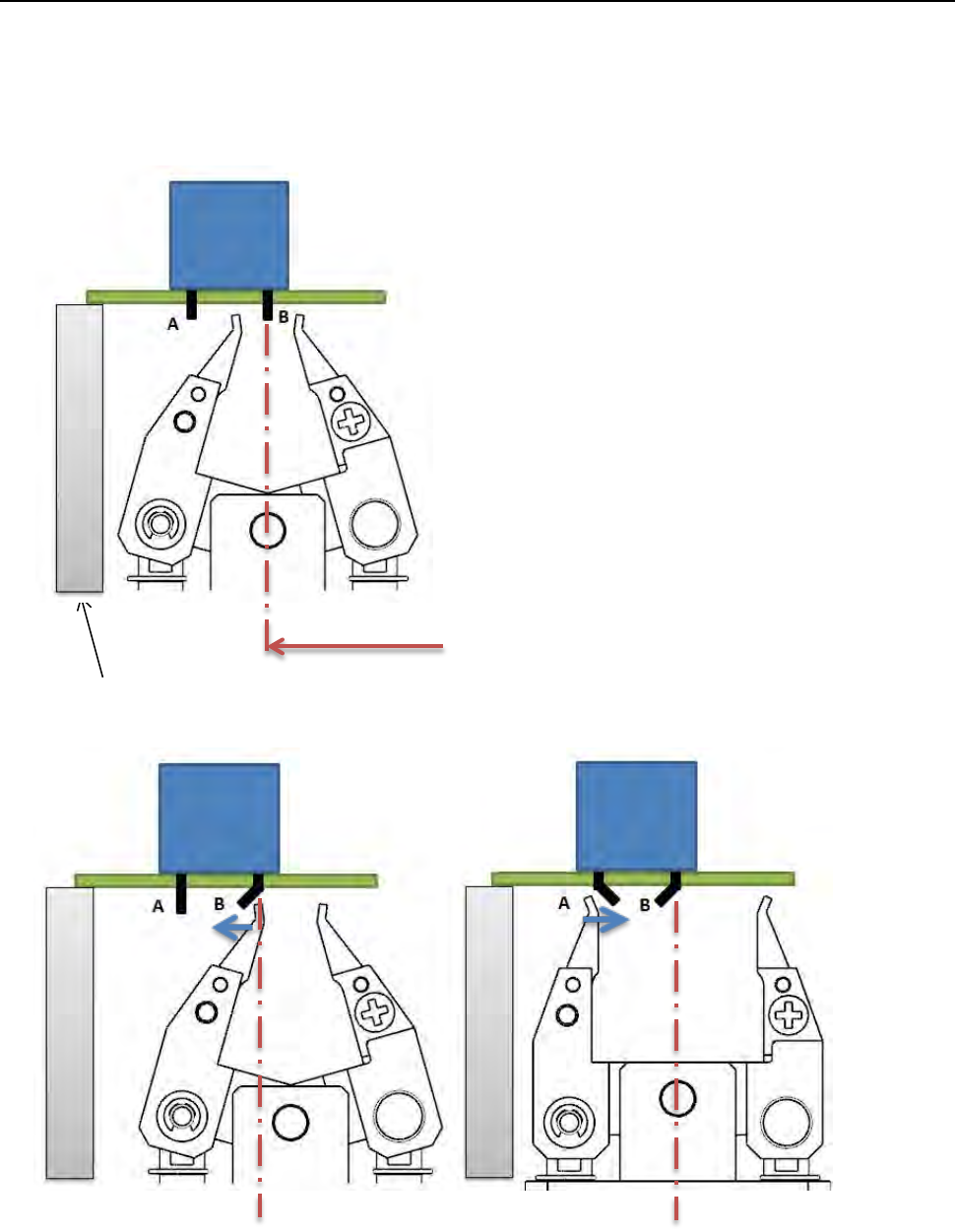
在「1 次弯脚固定动作弯曲 1 对引脚」的过程中,即使 弯脚固定头在不能移动的范围内,有时可以通过「1
个 1 个弯曲任意引脚」来完成弯脚固定。
【示意图】
在第 1 次,将引脚 B「从朝内到朝外」弯曲。
增加爪的打开量,在第 2 次将引脚 A「从朝外到朝内」进行弯曲,实现弯脚固定。
因为会与传送轨道发生碰触,
所以弯脚固定头不能再移动。
传送轨道
附录 弯脚固定补充
B-25
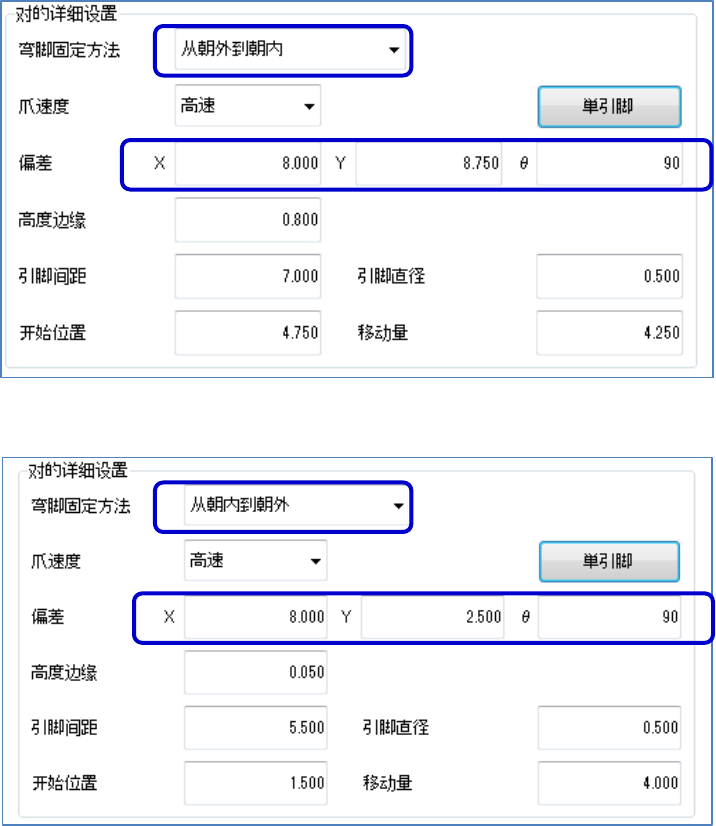
在 5.3 章的示例中,将引脚 A、引脚 C、引脚 E 的弯脚固定方法设定为「从朝外到朝内」。
弯脚固定方为「从朝外到朝内」时的输出值,与「从朝内到朝外」时的输出值的偏差 X、Y、θ值(=弯脚
固定头中心位置),如下表所示。
从朝外到朝内
从朝内到朝外
X
Y
θ
X
Y
θ
引脚
A
8
8.75
90
8
2.5
90
引脚
C
- 8
8.75
90
- 8
2.5
90
引脚
E
0
- 8.75
90
0
- 2.5
90
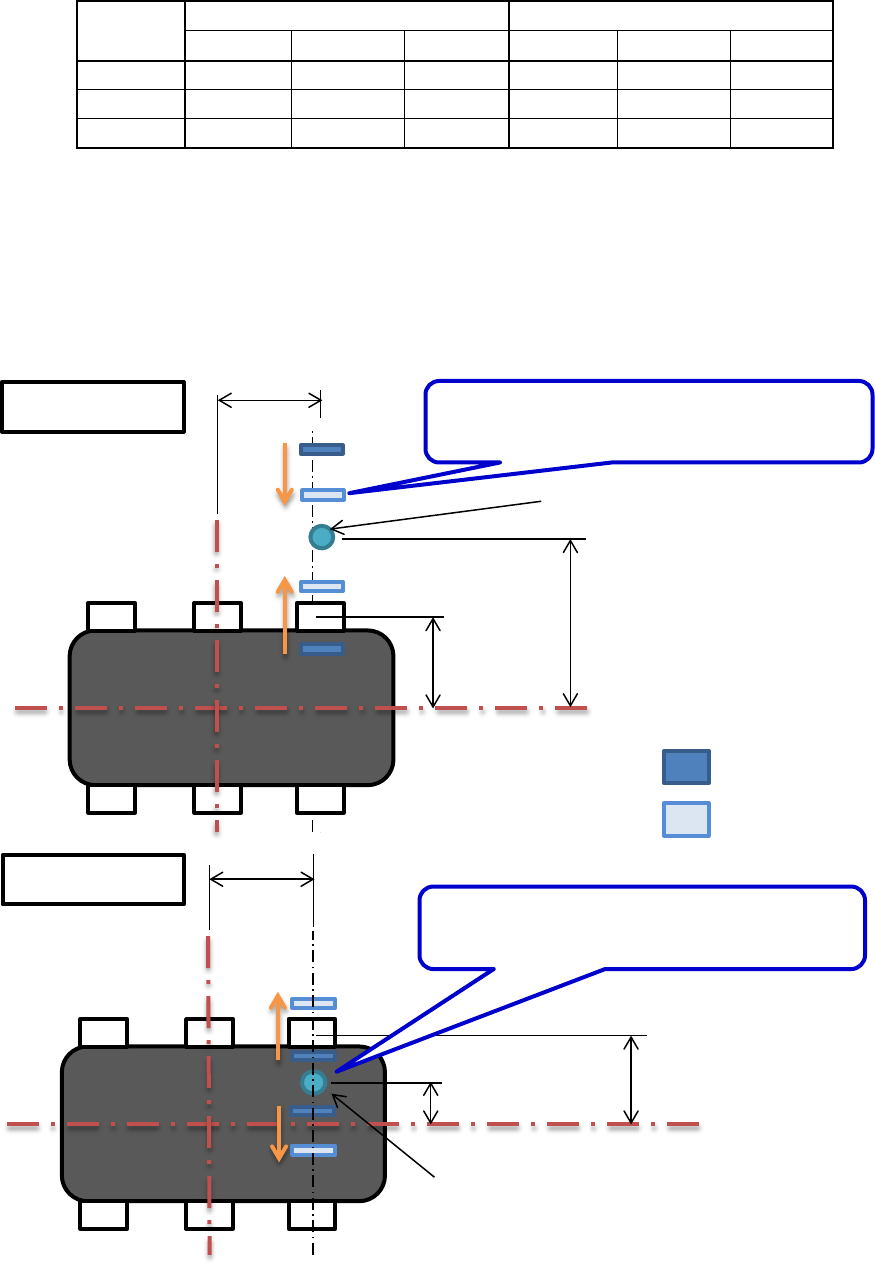
用图显示引脚 A 的情况时,为如下所述。
因未弯曲引脚侧的爪也一起执行开闭动作,有时弯脚固定头的位置会造成基板背面元件与爪发生触碰,所
以通过变更弯脚固定方法可能可以避免这种情况。
此外,处在弯脚固定头不能移动的范围时,有时变更弯脚固定方法,可以变为弯脚固定头的可移动范围。
动作前的爪位置
动作后的爪位置
基板背面元件与爪发生触碰时,
变更弯脚固定方法可能可以避免这种情况。
从朝外到朝内
弯脚固定头位置
Y = 8.5
X= 8
引脚位置
y = 5
弯脚固定头中心位置
从朝内到朝外
弯脚固定头位置
Y = 2.5
X=8
引脚位置
y = 5
弯脚固定头中心位置
变更弯脚固定方法,有时可以变为弯脚固定
头的可移动范围。
附录 弯脚固定补充
B-26
引脚 A 为「从朝外到朝内」时的数据
引脚 A 为「从朝内到朝外」时的数据
通过变更弯脚固定方法,可以改变弯脚固定头中心位置,有时候将成为弯脚固定头可移动的范围。