操作手册-2016_CH_ - 第29页
地址: 东莞市东 城区牛山 金鸡岭兴 华工 业园 F 栋 电话: +8 6-400-1 189-123 E-m ail: aoi@aleade r .hk Http:// www.aleader.hk TEL:+86 - 400 - 1189 - 123 E - mail:aoi@aleader.hk Page: 29 of 199 Barco de ,就是条码识别, 将条码序列好作为 该程序的记录名。条 码注册模块是单独 存在,其注册…
地址: 东莞市东城区牛山金鸡岭兴华工业园 F 栋
电话: +86-400-1189-123 E-mail:aoi@aleader.hk
Http://
www.aleader.hk TEL:+86
-
400
-
1189
-
123 E
-
mail:aoi@aleader.hk Page:
28
of
199
如上图①中为 SOP 件的所有检测项。其注册与调试如下:
元件类
型
检测项 说明
本体框
本体框的作用是用于定位、偏移。其注册与调试见<基本算法>中<偏移>
中采用“Match”算法。
虚焊框
虚焊框的作用是用于检测焊点的好坏状况。其注册与调试见<基本算法>
中<虚焊>中的“PIN”或者“Other”算法。
短路框
短路框的作用是用于检测 IC 引脚之间是否发生短路。其注册与调试见<
基本算法>中<短路>中的“Short”算法。
SOP
错件(缺件)
框
错件框的作用是用于检测焊点是否错件、侧立、立碑、反白。其注册与
调试见<基本算法>中<错件>中的“OCV”或者“TOC”算法。
QFP 器件
QFP 的元件与调试与 SOP 的注册与调试一致,请参考<炉后程序制作>中“SOP”的注册与调试。
BGA 器件
BGA 是重要的炉后贴片元件,BGA 主要检测其偏移和错件。其元件标准包括 1 个主体框(定位)框、2 个偏
移框和 1 个错件框。示意图如下:
上图为 BGA 的注册示意图,红色框为主体框,蓝色框为偏移框,紫色框为错件框。结构表如下:
元件类
型
检测项 说明
本体框
本体框的作用是用于定位、偏移。其注册与调试见<基本算法>中<偏移>
中采用“Match”算法。
偏移框
偏移框的作用是用于检测 BGA 是否发生偏移。其注册与调试见<基本算
法>中<偏移>中采用“Offset”算法。
BGA
错件(缺件)
框
错件框的作用是用于检测焊点是否错件、缺件、反白。其注册与调试见
<基本算法>中<错件>中的“OCV”算法。
提示:偏移框主要是采用“Offset”算法抽取 BGA 边缘的成分;错件框则通过“OCV”获取“OCR”来判断
BGA 是否发生错件(缺件)。
Barcode
地址: 东莞市东城区牛山金鸡岭兴华工业园 F 栋
电话: +86-400-1189-123 E-mail:aoi@aleader.hk
Http://
www.aleader.hk TEL:+86
-
400
-
1189
-
123 E
-
mail:aoi@aleader.hk Page:
29
of
199
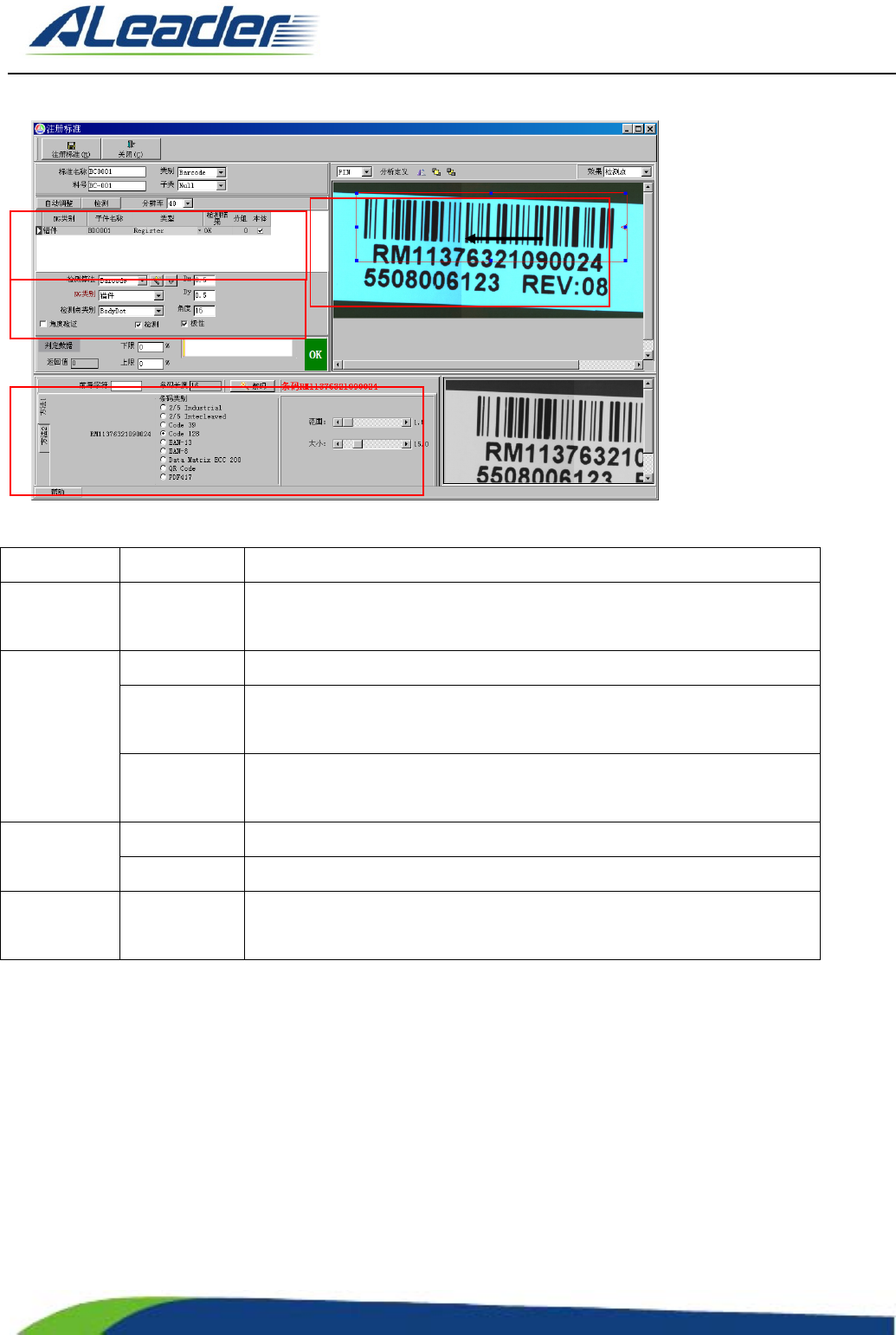
Barcode,就是条码识别,将条码序列好作为该程序的记录名。条码注册模块是单独存在,其注册窗体如下:
上图为 Barcode 的注册框,其相关参数如下:
类别 参数 参数说明
错件框大
小
错件框大
小
上图中 A 区域,要框条码部分,要超出条码一定距离(50 个像素)。
检测算法 上图中 B 区域,【检测算法】选择“Barcode”算法。
检测点类
型
上图中 B 区域,【检测点类型】选择“BodyDot”。
算法
其他
上图中 B 区域,【角度验证】为“非选择”状态,【检测】为“选择”
状态,极性为“选择”状态。
判定范围 上图中 C 区域,默认判定范围为(0,0)
判定参数
返回值 上图中 C 区域,返回值为 0。
Barcode
参数
条码类型 上图中 D 区域,选择相应的条码类型。
提示:条码识别时选择合理的分辨率将增加条码识别的能力。
Mark
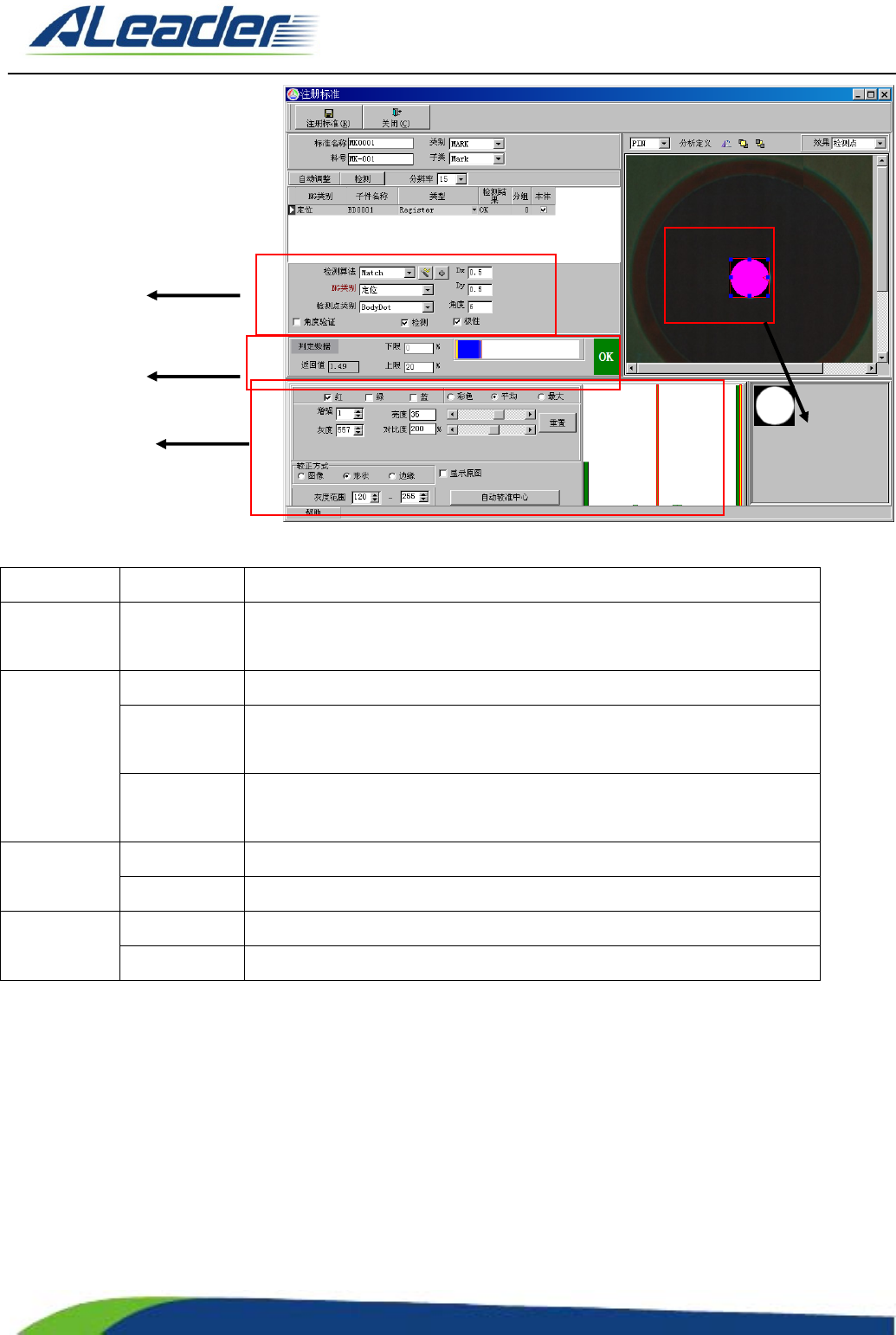
Mark 注册,是制作程序的前提条件。Mark 校正,是把图像的坐标系统与机械坐标系。其“形状”类别的注册
窗体如下:
A
B
C
D
地址: 东莞市东城区牛山金鸡岭兴华工业园 F 栋
电话: +86-400-1189-123 E-mail:aoi@aleader.hk
Http://
www.aleader.hk TEL:+86
-
400
-
1189
-
123 E
-
mail:aoi@aleader.hk Page:
30
of
199
上图为 Mark 的注册窗体,相关参数如下:
类别 参数 参数说明
错件框大
小
错件框大
小
上图中 A 区域,定位框要外切几何 Mark 图形。
检测算法 上图中 B 区域,【检测算法】选择“Match”算法。
检测点类
型
上图中 B 区域,【检测点类型】选择“BodyDot”。
算法
其他
上图中 B 区域,【角度验证】为“非选择”状态,【检测】为“选择”
状态,极性为“选择”状态。
判定范围 上图中 C 区域,默认判定范围为(0,20)
判定参数
返回值 上图中 C 区域,返回值为 1.49。
色彩设置 上图中 D 区域,【红】 + 【平均】
Mark 参数
类别 上图中 D 区域,校正方式选择【形状】模式。
提示:当 PCBA 中没有规则的 Mark 标识,则采用“图像”方式注册条码,其注册请参考电容的本体注册。
波峰焊焊点注册方法
3.1.4 插件
1) 定位
DIP 件焊盘的定位,区分于 Chip 件的定位方式。Chip 件焊盘的特征为色彩变化大、亮度变化大。对于此,Chip
件的 Match 算法则不适用于 DIP 件焊盘定位,并且 DIP 件的焊盘大部分为椭圆形。DIP 件的算法采用提取焊锡
A
C
D
B