M3plus_OperationManual_e.pdf - 第233页
B - 20 B Alignment T ype glossar y 2. Alignment T ype glossary Base Alignment PLCC Setting 1 enable base recognition. Vision Option 2 Set to 0. Vision Option 3 Set to 0. Vision Option 4 Set to 0. Lead Group N Set the num…
B -19
B
Alignment Type glossary
2. Alignment Type glossary
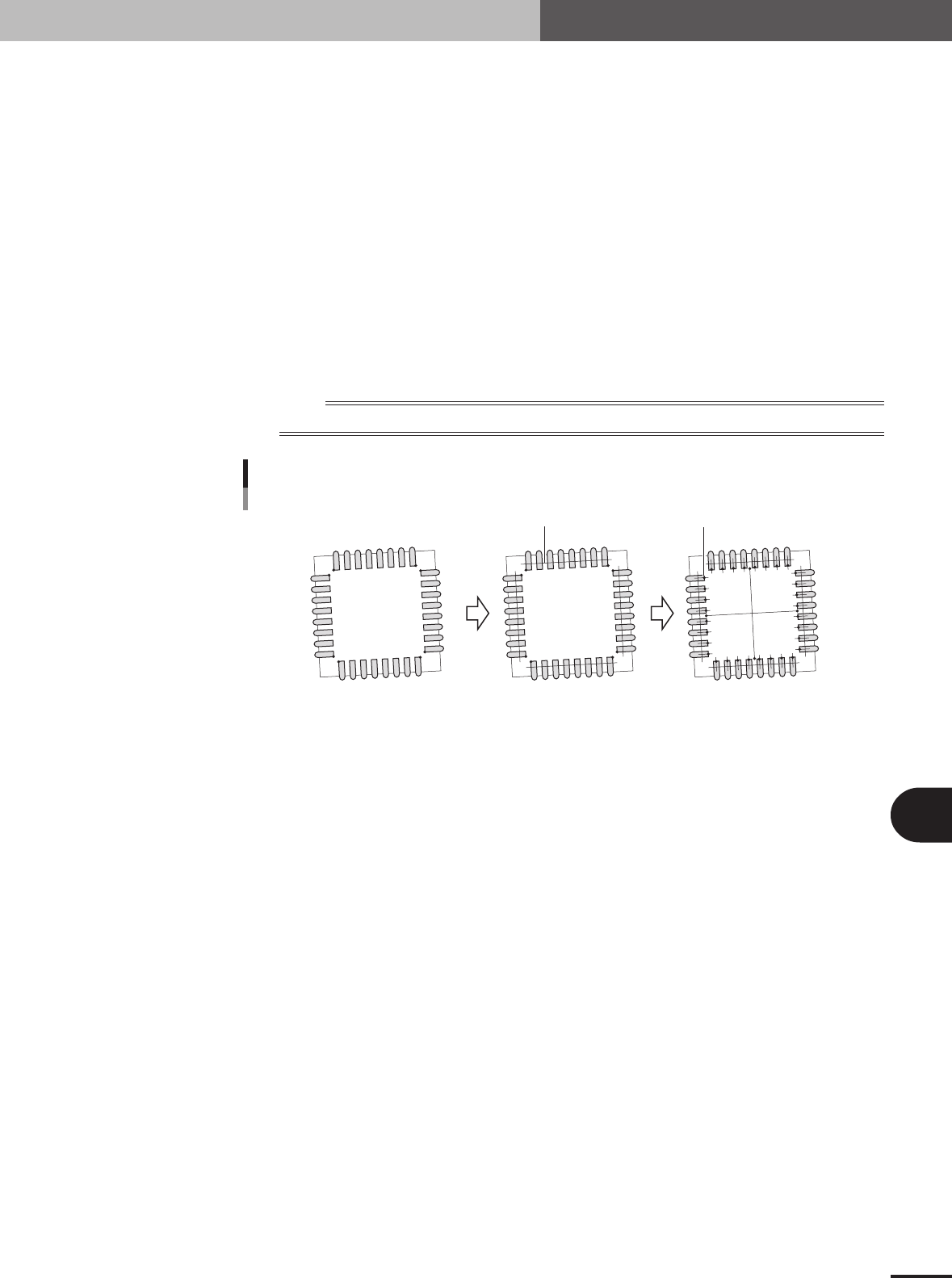
2.2.6 PLCC (SOJ) base recognition mode
In PLCC (SOJ) recognition, this mode is provided to detect the base of the lead.
1. Lead detection
This mode finds P0 to P7 in the direction of the lead base as shown in the figure below.
2. Lead center setting
Finds the lead center from the distribution (density) on the line where P0 to P7 are offset by a
specified value.
3. Lead base edge detection
Detects the edge of the lead base on the line passing through the center of the leads and perpen-
dicular to the line used to find the distribution (density).
4. Component center and tilt detection
All of the lead base positions are averaged to obtain the component center, and the tilt of the lines
joining the centers of the opposing sides are averaged and taken as the component tilt.
n
NOTE
The Search Area must be set so that the lead base position can be detected.
P1
P0
P4
P6
P5
P7
P3
P2
P1
P0
P4
P6
P5
P7
P3
P2
PLCC (SOJ) base recognition
Offset line
Lead center Edge of base
23B08-5E-20
■ PLCC base recognition
Alignment Group Special
Alignment Type Special
Comp. Threshold Set the binary level. (If set to 0, the binary level is
automatically set to 30.)
Comp. Tolerance Specify the shape dimension tolerance.
Search Area Set the detection range.
Body Size X Set the component size.
Body Size Y Set the component size.
Body Size Z Set the component thickness.
Cntr. Offset X (mm)
Cntr. Offset Y (mm)
Cntr. Offset R (deg)
Ruler Offset N Set in pixels the amount to offset the detection line in the
N direction.
Ruler Offset S Set in pixels the amount to offset the detection line in the S
direction.
Ruler Offset E Set in pixels the amount to offset the detection line in the
E direction.
Ruler Offset W Set in pixels the amount to offset the detection line in the
W direction.
Ruler Width Set the width of the lead detection line.
Algorithm Special 1

B -20
B
Alignment Type glossary
2. Alignment Type glossary
Base Alignment PLCC
Setting 1 enable base recognition.
Vision Option 2 Set to 0.
Vision Option 3 Set to 0.
Vision Option 4 Set to 0.
Lead Group N Set the number of lead groups (1 or 2).
Lead Number N1 Set the number of leads.
ReflectLL N1 (mm) Set the lead length for the upper lead image.
Lead Width N1 (mm) Set the upper lead width.
Lead Pitch N1 (mm) Set the upper lead pitch.
Find PosX N1, Find PosY N1 Set the upper left lead base position.
Lead Number N2 to Find PosY N2 Set the group 2 data when the number of lead groups is 2.
Set 0 when the number of lead groups is 1.
Lead Group S Set the number of lead groups (1 or 2).
Lead Number S1 Set the number of leads.
ReflectLL S1 (mm) Set the lead length for the lower lead image.
Lead Width S1 (mm) Set the lower lead width.
Lead Pitch S1 (mm) Set the lower lead pitch.
Find PosX S1, Find PosY S1 Set the lower left lead base position.
Lead Number S2 to Find PosY S2 Set the group 2 data when the number of lead groups is 2.
Set 0 when the number of lead groups is 1.
Lead Group E Set the number of lead groups (1 or 2).
Lead Number E1 Set the number of leads.
ReflectLL E1 (mm) Set the lead length for the right lead image.
Lead Width E1 (mm) Set the right lead width.
Lead Pitch E1 (mm) Set the right lead pitch.
Find PosX E1, Find PosY E1 Set the upper right lead base position.
Lead Number E2 to Find PosY E2 Set the group 2 data when the number of lead groups is 2.
Set 0 when the number of lead groups is 1.
Lead Group W Set the number of lead groups (1 or 2).
Lead Number W1 Set the number of leads.
ReflectLL W1 (mm) Set the lead length for the left lead image.
Lead Width W1 (mm) Set the left lead width.
Lead Pitch W1 (mm) Set the left lead pitch.
Find PosX W1, Find PosY W1 Set the upper left lead base position.
Lead Number W2 to Find PosY W2 Set the group 2 data when the number of lead groups is 2.
Set 0 when the number of lead groups is 1.
Others Set to 0.

B -21
B
Alignment Type glossary
2. Alignment Type glossary
2.2.7 Center-of-gravity detection (probe recognition mode)
This method finds the contour of the component and recognizes the component from the
center-of-gravity position and tilt of the main axis. This is utilized for recognizing
irregular shaped components.
The center-of-gravity and main axis tilt are found from the contour (edge) only. So there
is no effect on the center-of-gravity position and on main axis tilt even when there is a
hole in the component.
This method utilizes 2 recognition modes, "Center-of-gravity detection" and "Melf chip
recognition".
n
NOTE
The square and circles do not have an axis so the tilt is undefined.
■ Center-of-gravity detection
Alignment Group Special
Alignment Type Center
Comp. Threshold Set the binary level. (If set to 0, the binary level is set
automatically.)
Comp. Tolerance Specify the shape dimension tolerance.
Search Area Set the detection range.
Body Size X Set the component size.
Body Size Y Set the component size.
Body Size Z Set the component thickness.
Cntr. Offset X (mm)
Cntr. Offset Y (mm)
Cntr. Offset R (deg)
■ Melf chip
Alignment Group Chip
Alignment Type Melf Chip
Comp. Threshold Set the binary level. (If set to 0, the binary level is set
automatically.)
Comp. Tolerance Specify the shape dimension tolerance.
Search Area Set the detection range.
Body Size XY Set the component diameter.
Body Size Z Set the component size.
Ruler Offset