99469_UR16e_User_Manual_zh_Global.pdf - 第114页
您 可 以 锁 定 一 个 或 多 个 轴 , 以 允 许 TC P 在 下 表 所 定 义 的 特 定 方 向 上 移 动 。 所 有 轴 都 是 自 由 的 允 许 通 过 所 有 轴 移 动 。 平 面 只 允 许 通 过 X 轴 和 Y 轴 移 动 。 平 移 允 许 通 过 所 有 轴 移 动 , 无 旋 转 。 旋 转 允 许 在 所 有 轴 上 以 球 面 运 动 方 式 绕 TC P 移 动 。 警 告 连 接 工 具 …

19.自由驱动
本章介绍如何在“自由驱动”模式下使用机器人手臂。
“自由驱动”可将机器人手臂手动拉伸到理想的位置和位姿。
使用“自由驱动”时,如果机器人手臂接近关节极限或安全平面,则会产生排斥力( 请参阅
22.11. 平面 在本页112) 。
当机器人手臂处于“自由驱动”模式时,PolyScope 上将出现一个面板,如下图所示。
“自由驱动”面板上状态栏中的 LED 指示:
• 当一个或多个关节接近其关节限值时。
• 当机器人手臂的位置接近奇点时。当机器人接近奇点时,阻力会增加,会使其感到难以
定位。
用 户 手 册 99 UR16e
19.自 由驱 动
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
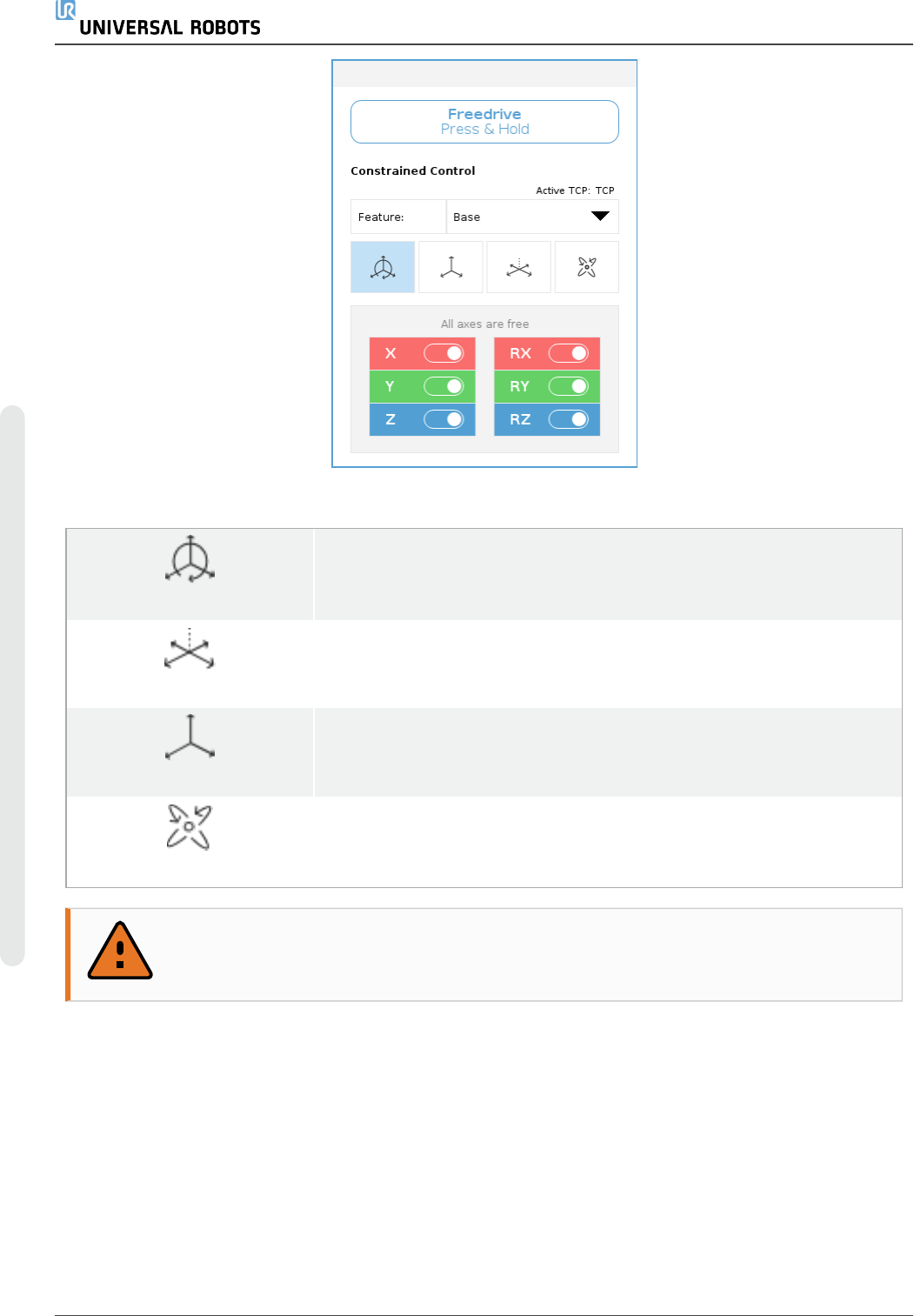
您可以锁定一个或多个轴,以允许 TCP 在下表所定义的特定方向上移动。
所有轴都是自由的
允许通过所有轴移动。
平面
只允许通过 X 轴和 Y 轴移动。
平移
允许通过所有轴移动,无旋转。
旋转
允许在所有轴上以球面运动方式绕 TCP 移动。
警告
连接工具时,在某些轴上移动机器人手臂可能会出现夹点。
19.1. 启用自由驱动:标准示教盒
您可以通过以下方式启用自由驱动:
• 使用“自由驱动”按钮。
• 使用“移动”选项卡屏幕上的“自由驱动”按钮( 请参阅26.2.4. 自由驱动 在本页216)
• 使用 I/O 动作( 请参阅) 。
UR16e 100 用 户 手 册
19.自 由驱 动
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
警告
• 当您推动或触摸机器人时,不要启用自由驱动,因为这可能会导致机器
人漂移。
• 在自由驱动模式下移动机器人时不要切换轴,因为这会导致机器人漂
移。
19.1.1. 使用自由驱动按钮
1. 按住示教盒上的“自由驱动”按钮。
2. 当 PolyScope 中出现“自由驱动”面板时,为机器人手臂的关节选择所需的移动类型。或使
用轴列表自定义移动类型。
3. 如果需要,可以通过从“特征”下拉列表中选择一个选项来定义特征类型。
如果机器人手臂接近奇点,它可停止移动。点按“自由驱动”面板中的所有轴均自由移动
可恢复移动。
4. 根据需要移动机器人手臂。
19.1.2. 使用“移动”选项卡屏幕上的“自由驱动”按钮
1. 在页眉中,点按移动。
2. 在“机器人”面板中,点按自由驱动。
3. 当“自由驱动”面板出现时,为机器人手臂的关节选择所需的移动类型。或使用轴列表自
定义移动类型。
4. 如果需要,可以通过从“特征”下拉列表中选择一个选项来定义特征类型。
如果机器人手臂接近奇点,它可停止移动。点按“自由驱动”面板中的所有轴均自由移动
可恢复移动。
5. 在“自由驱动”面板上,按住自由驱动可移动机器人手臂。
19.2. 启用自由驱动:3PE 示教盒
要使用 3PE 按钮自由驱动机器人手臂:
1. 快速轻按 3PE 按钮,然后轻按并按住该按钮。
现在,您可以在保持轻按的同时将机器人手臂拉到所需位置。
用 户 手 册 101 UR16e
19.自 由驱 动
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。