99469_UR16e_User_Manual_zh_Global.pdf - 第124页
2. 在 “ 自 定 义 ” 选 项 中 , 您 可 以 设 置 机 器 人 运 行 的 限 值 并 监 视 相 关 公 差 。 功 率 限 制 机 器 人 在 环 境 中 产 生 的 最 大 机 械 功 。 此 限 制 将 有 效 载 荷 视 为 机 器 人 而 非 环 境 的 一 部 分 。 动 量 限 制 最 大 机 器 人 动 量 。 停 止 时 间 限 制 机 器 人 停 止 所 需 的 最 长 时 间 , 例 如 , 当 紧…
“在靠近机器人作业前,确保安全配置符合预期。这可以通过检查 PolyScope 右上角的安全校
验和是否有任何变化等方式来进行验证。”
22.4. 应用新的安全配置
在更改配置时,机器人将断电。所做的更改只有在点按应用按钮后才会生效。在应用并重启或
恢复更改之前,机器人不能再次通电。前者让您能够目检机器人安全配置,出于安全原因,该
配置以国际单位显示在弹出窗口中。当目检完成时,您可以确认安全配置,所做的更改将自动
保存为当前机器人安装设置的一部分。
22.5. 安全校验和
安全校验和图标显示您应用的机器人安全配置,并从上到下,从左到右读取,例如 BF4B。不
同的文本和/或颜色表示对所应用的安全配置的更改。
如果更改安全功能设置,安全校验和将发生变化,因为安全校验和仅由安全设置生成。
您必须将更改应用于安全校验和的安全配置以反映您的更改。
22.6. 安全菜单设置
本节定义组成机器人安全配置的安全菜单设置。
22.7. 机器人限值
机器人限值可限制机器人的一般移动。“机器人限值”屏幕有两个配置选项:工厂预设值和自定
义。
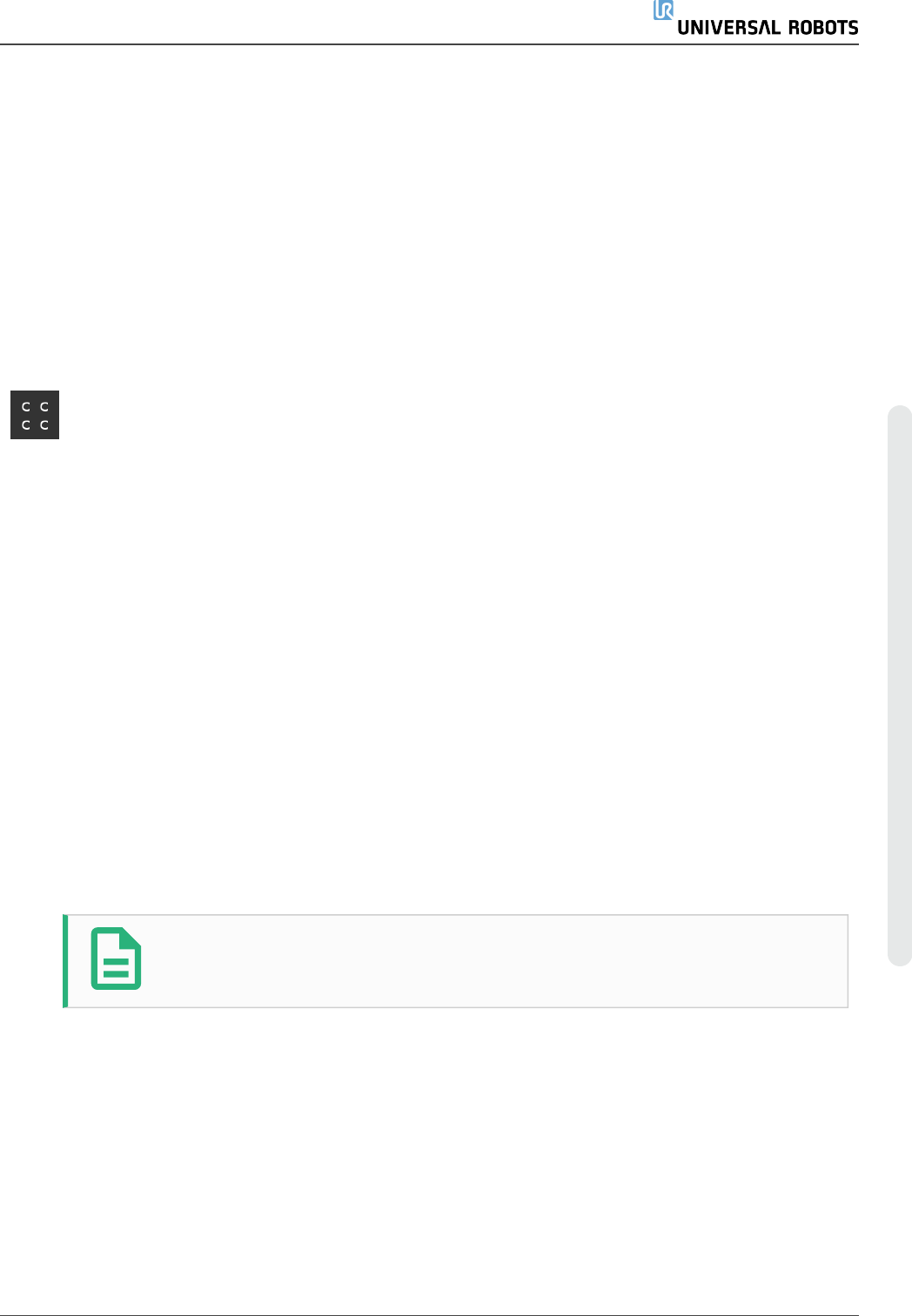
1. 在“工厂预设值”选项中,您可以使用滑块来选择预定义的安全设置。表中的值将更新以
反映从限制最多到限制最少的预设值
提示
滑块值仅为建议值,不替代正确的风险评估。
用 户 手 册 109 UR16e
22.安 全配 置
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
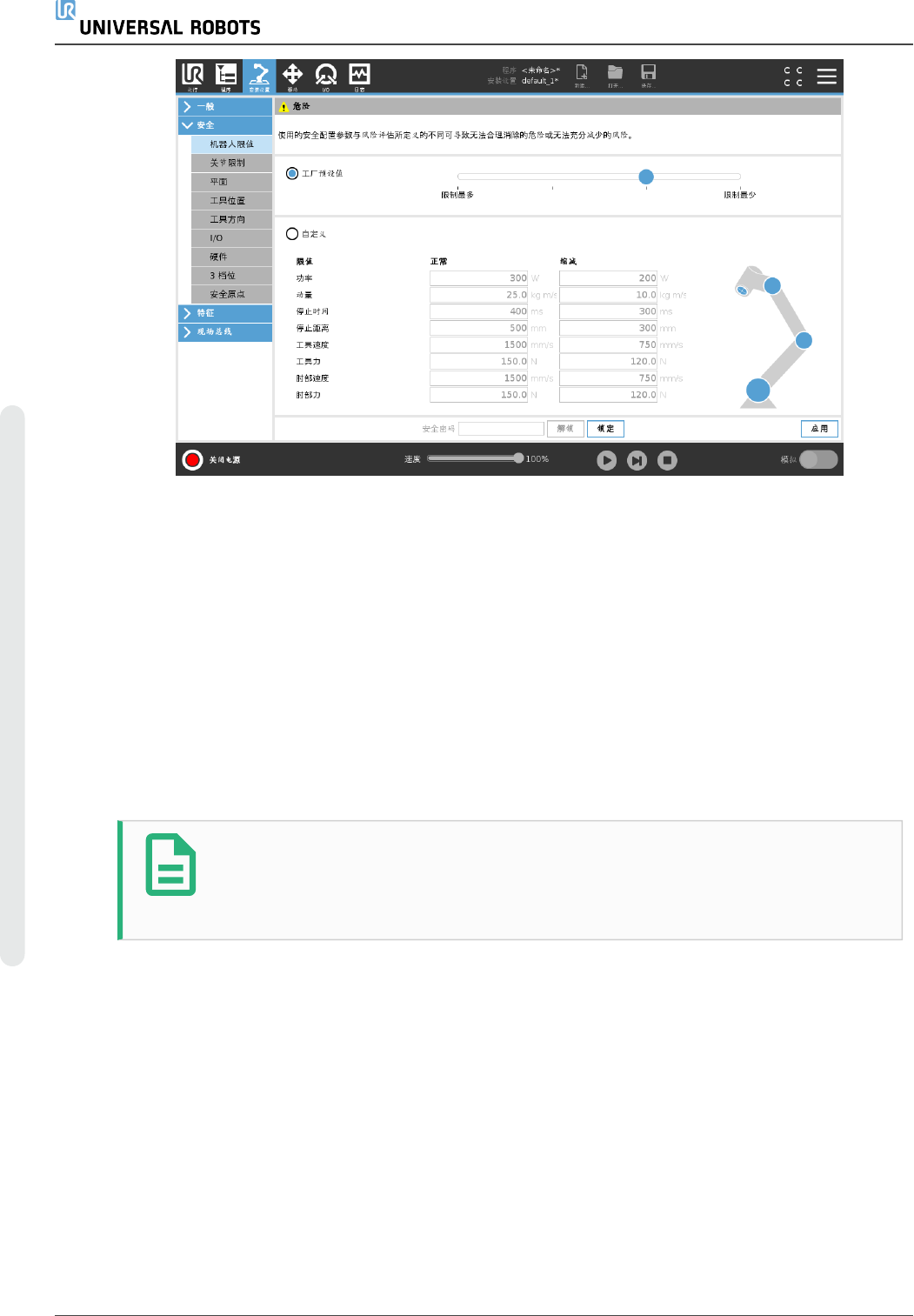
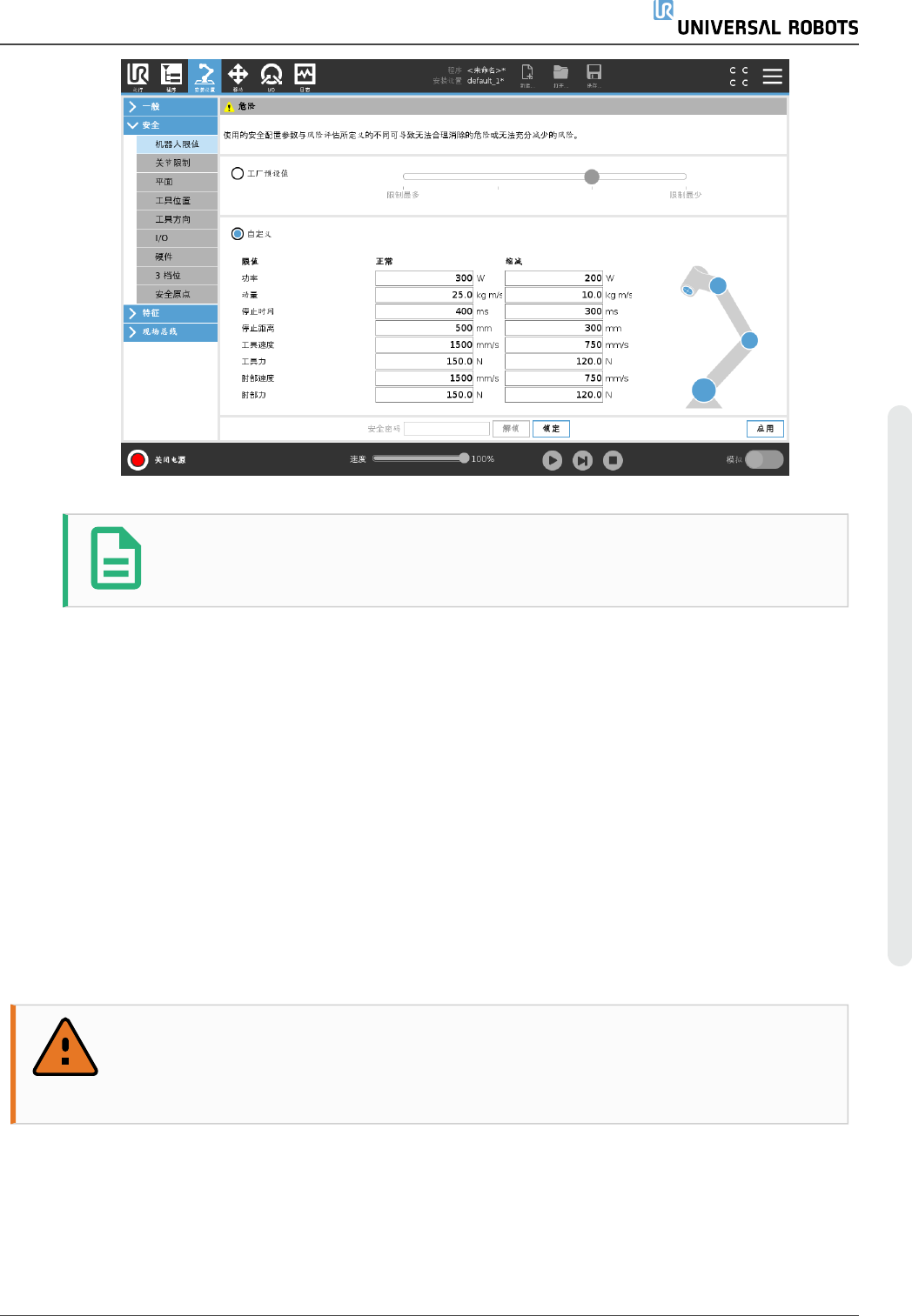
2. 在“自定义”选项中,您可以设置机器人运行的限值并监视相关公差。
功率
限制机器人在环境中产生的最大机械功。此限制将有效载荷视为机器人而非环境的
一部分。
动量
限制最大机器人动量。
停止时间
限制机器人停止所需的最长时间,例如,当紧急停止激活时。
停止距离
限制在停止时机器人工具或肘部可移动的最大距离。
提示
限制影响机器人整体速度的停止时间和距离。比如,如果停止时间被设
为 300 ms,最大机器人速度被限制,允许机器人在 300 ms 内停止。
工具速度
限制机器人工具的最大速度。
工具力
限制机器人工具在夹紧情况下施加的最大力。
肘部速度
限制机器人肘部的最大速度。
肘部力
限制机器人肘部对环境施加的最大力。
工具速度和力在工具法兰和用户定义的两个工具位置的中心受到限制,请参阅22.14. 刀
具位置 在本页116。
UR16e 110 用 户 手 册
22.安 全配 置
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
提示
您可以将所有机器人限值切换回工厂预设值来重置为它们的默认设置。
22.8. 安全模式
在正常条件下,即没有实施保护性停止时,安全系统将在与一组安全限值相关联的安全模式
下运行:
正常模式是默认情况下处于激活状态的安全模式。
当机器人工具中心点 (TCP) 的位置超出触发缩减模式平面( 请参阅22.11. 平面 下一页) 或使用
可配置的输入触发时( 请参阅22.16. I/O在本页120) ,将激活缩减模式。
违反激活的限值集中的安全限值时,将激活恢复模式,机器人手臂执行 0 类停机。如果在机器
人手臂通电时已经违反激活的安全限值( 如关节位置限值或安全边界) ,则机器人手臂将在恢
复模式下启动。这样可以将机器人手臂移回安全限值范围内。在恢复模式下,机器人手臂的运
动受到固定限值( 用户不能自定义) 的限制。有关恢复模式限值的详细信息,(see硬件安装
手册)。
警告
关节位置、工具位置和工具方向的限值在恢复模式下处于禁用状态,因此将机
器人手臂移回限值范围内时应小心。
用户可在安全配置屏幕的菜单上独立设置正常和缩减模式的安全限值。就工具和关节而言,
缩减模式下对于速度和动量的限值要求比标准模式下的更严格。
用 户 手 册 111 UR16e
22.安 全配 置
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。