99469_UR16e_User_Manual_zh_Global.pdf - 第127页
提 示 平 面 的 配 置 完 全 基 于 特 征 进 行 。 我 们 建 议 您 在 编 辑 安 全 配 置 之 前 创 建 并 命 名 所 有 特 征 , 因 为 一 旦 安 全 选 项 卡 被 解 锁 , 机 器 人 将 会 断 电 , 将 不 可 能 移 动 机 器 人 。 安 全 平 面 限 制 了 机 器 人 的 工 作 空 间 。 最 多 可 定 义 八 个 安 全 平 面 用 来 限 制 机 器 人 工 具 和 肘 部 …
22.9. 公差
“安全配置”中指定了安全系统限值。
安全系统
接收输入字段的值,并检测这些值是否存在违
例。机器人控制器尝试通过进行防护停止或降低速度来防止任何违例行为。这意味着程序可
能无法执行非常接近极限的运动。
警告
具体公差因软件版本而异。因此更新软件可能会改变公差。请参考发布说明了
解有关软件版本变化的信息。
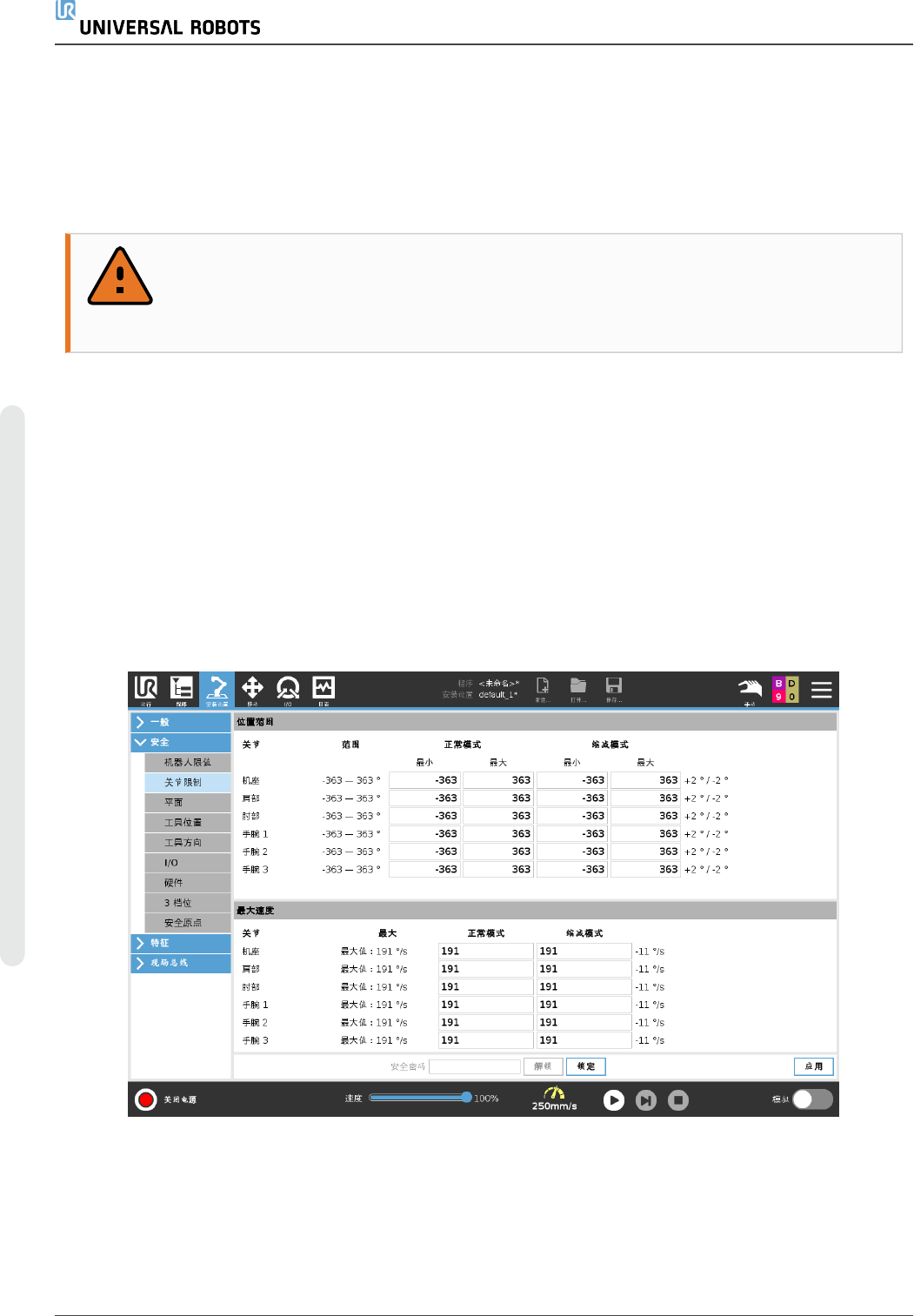
22.10. 关节限制
关节限值用来限制每个机器人关节在关节空间中的移动,即:关节旋转位置和关节旋转速度。
一共有两个关节限值选项:最大速度和位置范围。
Wrist 3位置范围默认为无限制。使用连接到机器人的电缆时,您必须首先禁用手腕 3 无范围限
制复选框,以避免电缆拉力和保护性停止。
1. 最大速度定义了每个关节的最大角速度。
2. 位置范围定义了每个关节的位置范围。此外,如果没有安全平面或可配置的输入设置来
触发它,缩减模式的输入字段被禁用。该限值启用机器人的安全级软轴限制。
22.11. 平面
UR16e 112 用 户 手 册
22.安 全配 置
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
提示
平面的配置完全基于特征进行。我们建议您在编辑安全配置之前创建并命名所
有特征,因为一旦安全选项卡被解锁,机器人将会断电,将不可能移动机器人。
安全平面限制了机器人的工作空间。最多可定义八个安全平面用来限制机器人工具和肘部。
还可以限制每个安全平面的肘部运动,也可以通过取消选中复选框来禁用。在配置安全平面
之前,您必须在机器人安装设置中定义一个特征( 请参阅) 。然后可将该特征复制到安全平面
屏幕并进行配置。
警告
定义安全平面只限制定义的工具球和肘部,而不是对机器人手臂的整体限制。
这意味着,指定安全平面并不保证机器人手臂的其他部分也遵守此限制。
22.11.1. 模式
您可以使用下列图标为每个平面配置限制模式。
已禁用
在此状态下,安全平面从不激活。
正常
当安全系统处于正常模式时,正常平面将处于激活状态,并严格限制机器人的位置。
缩减
当安全系统处于缩减模式时,缩减模式平面将处于激活状态,并严格限制机器人的位置。
正常和缩减
当安全系统处于正常或缩减模式时,正常和缩减模式平面将处于激活状态,并严格限制机
器人的位置。
触发器缩减模式
如果机器人工具或肘部所处的位置超出安全平面,安全平面会使安全系统切换到缩减模
式。
显示
按下此图标将在图形窗格中隐藏或显示安全平面。
删除
删除创建的安全平面。没有撤消/重做操作。如果误删某个平面,则必须重新创建。
重命名
按此图标可以对平面进行重命名。
用 户 手 册 113 UR16e
22.安 全配 置
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
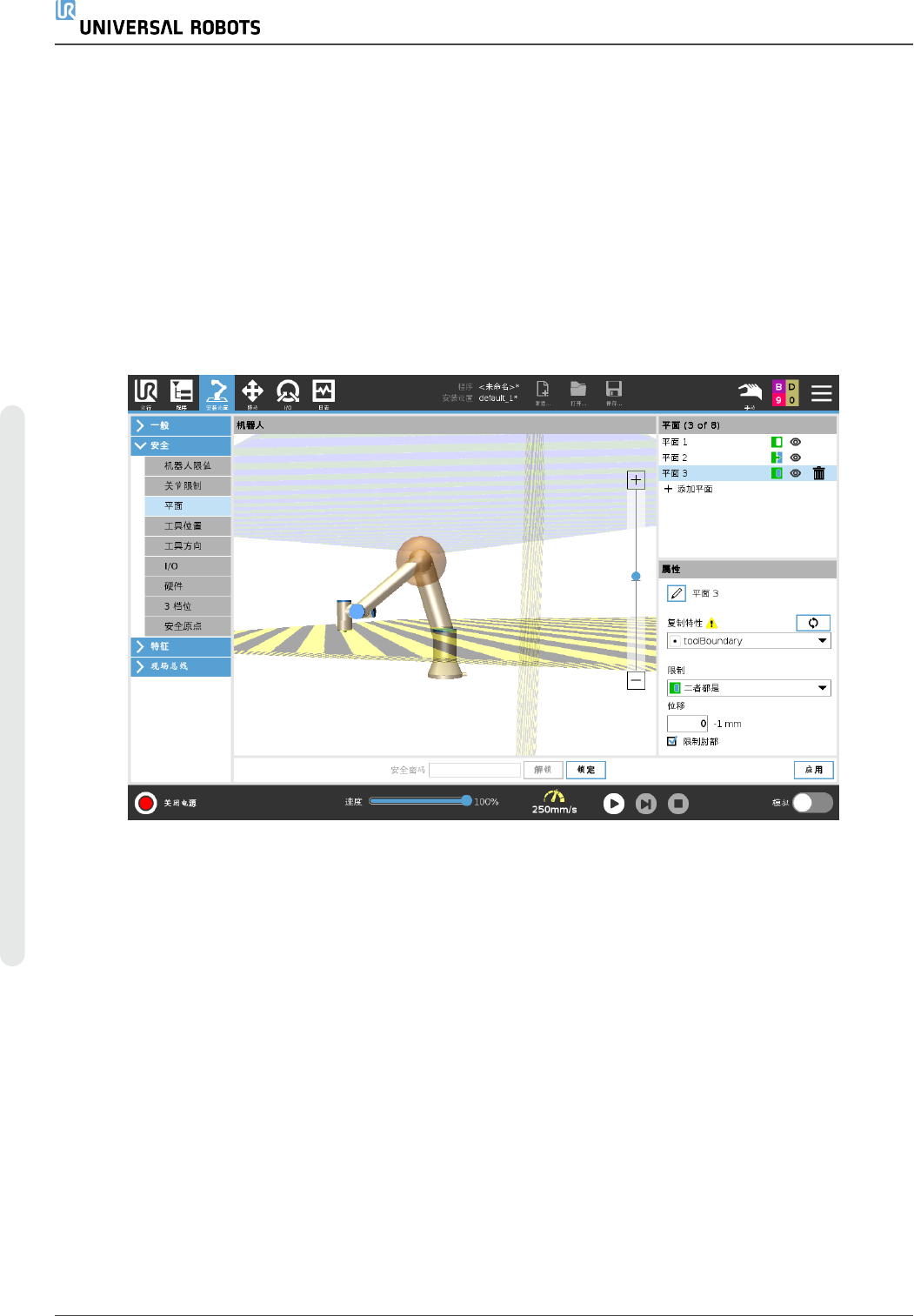
22.11.2. 配置安全平面
1. 在 PolyScope 页眉中,点按安装设置。
2. 在屏幕左侧的边栏菜单中,点按“安全”,然后选择平面。
3. 在屏幕右上方的“平面”字段中,点按添加平面。
4. 在屏幕右下角的属性字段中,设置“名称”、“复制特征”和“限制”。
在复制特征中,只有“未定义”和“机座”可用。您可以通过选择未定义来重置已配置的安全平面
在特征屏幕中,如果复制的特征被修改,警告图标将出现在复制特征文本的右侧。这指示该特
征未同步,即:属性卡中的信息没有更新来反映可能已对特征做出的修改。
22.11.3. 肘部
您可以启用限制肘部来防止机器人肘部关节通过您定义的任何平面。禁用限制肘部让肘部通
过这些平面。
UR16e 114 用 户 手 册
22.安 全配 置
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。