99469_UR16e_User_Manual_zh_Global.pdf - 第130页
22. 12.1. 使 用 自 由 驱 动 按 钮 1. 按 住 示 教 盒 上 的 自 由 驱 动 按 钮 。 2. 根 据 需 要 移 动 机 器 人 手 臂 。 22 . 1 3. 反 向 驱 动 在 机 器 人 臂 的 初 始 化 期 间 , 机 器 人 制 动 器 被 释 放 时 可 以 观 察 到 轻 微 的 振 动 。 在 某 些 情 况 下 , 例 如 当 机 器 人 接 近 碰 撞 时 , 不 希 望 出 现 这 些 …
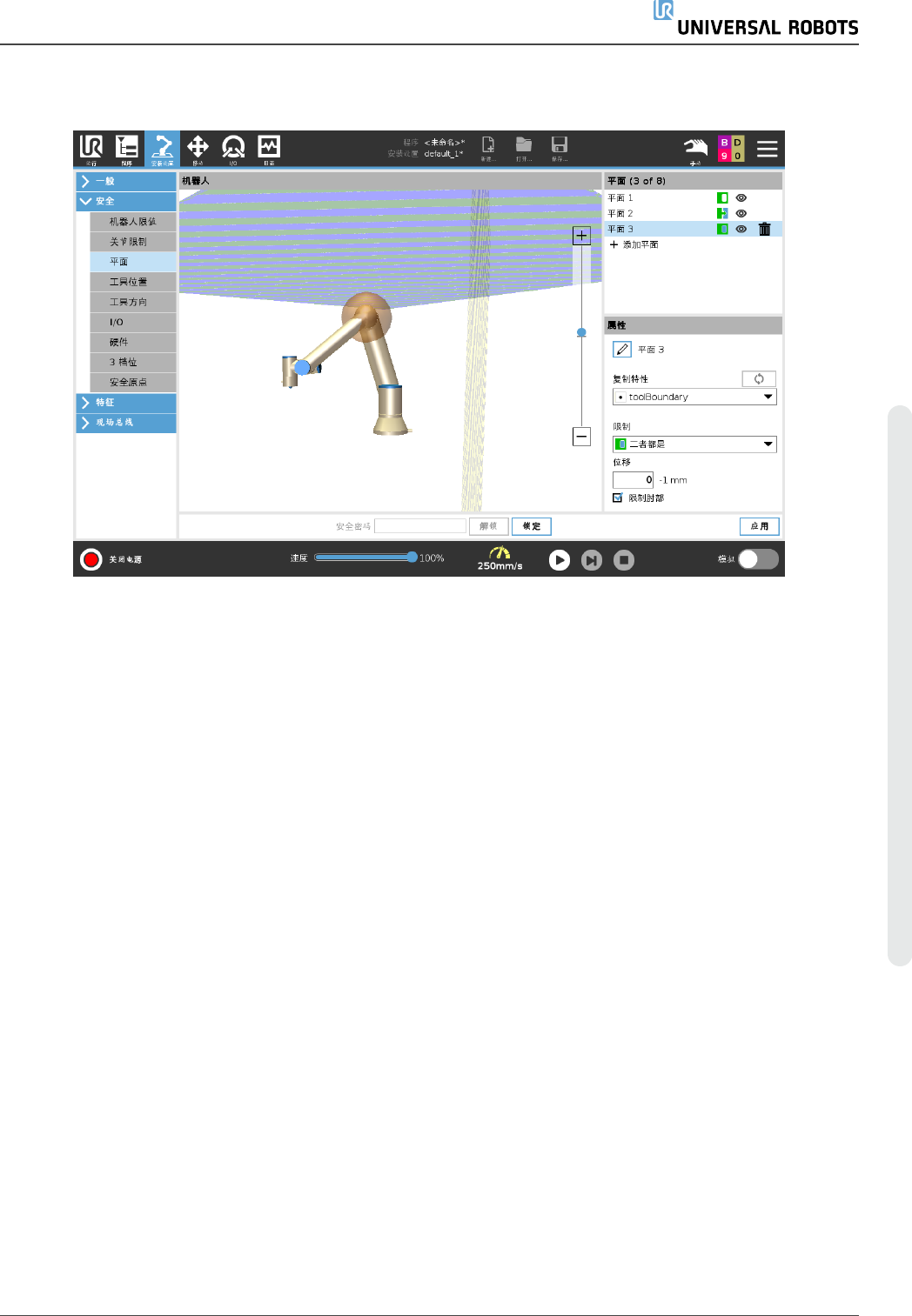
22.11.4. 颜色代码
灰色
平面已配置但被禁用 (A)
黄色和黑色
正常平面 (B)
蓝色和绿色
触发平面 (C)
黑色箭头
允许工具和/或肘部进入的平面的侧面( 针对正常平面)
绿色箭头
允许工具和/或肘部进入的平面的侧面( 针对触发平面)
灰色箭头
允许工具和/或肘部进入的平面的侧面( 针对禁用的平面)
22.12. 自由驱动
自由驱动可将机器人手臂自动拉伸到理想的位置/位姿。由于释放制动器,关节移动时电阻
小。手动移动机器人手臂时,它处于“自由驱动”模式( 请参阅21.1. 操作模式 在本页103) 。随着
“自动驱动”模式下的机器人手臂接近预定义限值或平面( 请参阅22.11. 平面 在本页112) ,阻力
会增加。这就使得将机器人移动就位感觉很沉重。您可以通过以下方式启用自由驱动:
• 使用自由驱动按钮
• 使用 I/O 动作( 请参阅)
• 使用“移动”选项卡屏幕上的“自由驱动”按钮( 请参阅26.2.4. 自由驱动 在本页216)
用 户 手 册 115 UR16e
22.安 全配 置
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
22.12.1. 使用自由驱动按钮
1. 按住示教盒上的自由驱动按钮。
2. 根据需要移动机器人手臂。
22.13. 反向驱动
在机器人臂的初始化期间,机器人制动器被释放时可以观察到轻微的振动。在某些情况下,例
如当机器人接近碰撞时,不希望出现这些震颤,可以使用反向驱动功能强制将特定关节移动
到所需位置,而不释放机器人手臂中的所有制动器。
22.13.1. 启用反向驱动
1. 在初始化屏幕上,点按开启启动序列。
2. 当机器人状态为空闲时,按住自由驱动按钮。机器人状态会变为反向驱动。
3. 制动器仅在施加较大压力的关节处释放。持续时间为自由驱动按钮接合/按下的时间。使
用反向驱动时,机器人手臂会感觉移动起来很沉重。
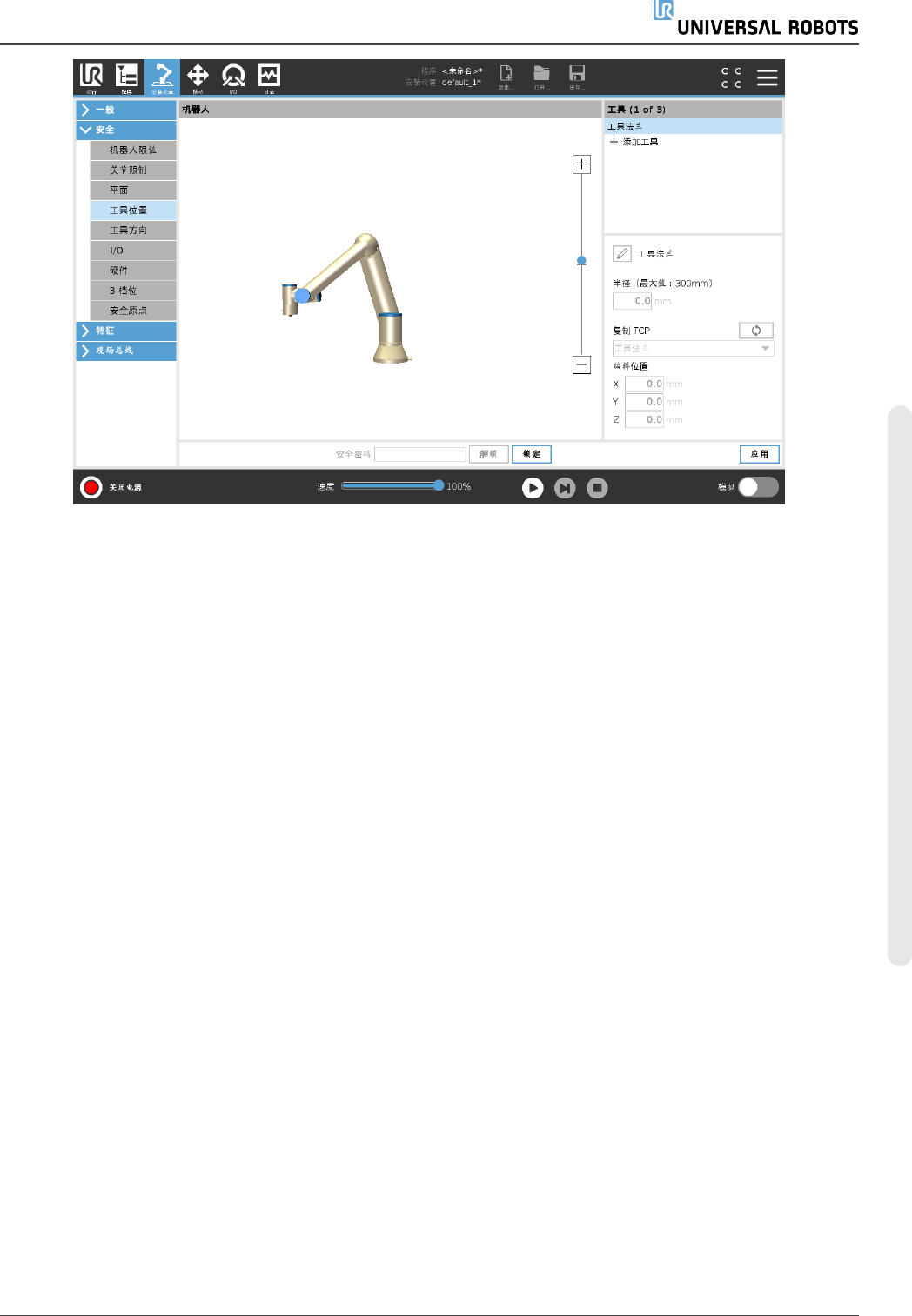
22.14. 刀具位置
“工具位置”屏幕可对放置在机器人手臂末端的工具和/或附件进行更多的限制控制。
机器人区域可以将您的修改可视化。
您可以在工具区域最多定义和配置两个工具。
Tool_1 是使用 x=0.0、y= 0.0、z=0.0 值和 0.0 半径定义的默认工具。这些值代表机器人工具法兰
的值。
在“复制 TCP”下,您也可以选择工具法兰,让工具的值回到 0。
机器人法兰上定义了一个默认球体。
UR16e 116 用 户 手 册
22.安 全配 置
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
对于用户定义的工具,用户可更改:
半径用于更改工具球的半径。当使用安全平面时将会考虑半径。当球中的某个点通过缩减模
式触发平面时,机器人将切换到
缩减
模式。安全系统会阻止球上的任何点通过安全平面( 请参
阅22.11. 平面 在本页112) 。
位置用于相对于机器人的工具法兰更改工具位置。针对工具速度、工具力、停止距离和安全平
面等安全功能,位置应被考虑。
您可以将现有工具中心点作为定义新工具位置的基础。在 TCP 屏幕的常规菜单中预定义的现
有 TCP 的副本可在复制 TCP 下拉列表中的工具位置菜单中找到。
当您在编辑位置输入字段中编辑或调整值时,下拉菜单中显示的 TCP 名称会更改为自定义,
这表示复制的 TCP 与实际限值输入之间存在差异。原始 TCP 仍可在下拉列表中找到,可再次
选择以便将值更改回原始位置。复制 TCP 下拉菜单中的选择不影响工具名称。
应用“工具位置”屏幕更改后,如果您试图在 TCP 配置屏幕中修改复制的 TCP,则“复制 TCP”文
本右侧会出现一个警告图标。这表示 TCP 不同步,即:属性字段中的信息未更新以反映可能已
对 TCP 进行的修改。可以通过按同步图标来同步 TCP( 请参阅25.2. TCP 配置 在本页185) 。
并不是必须同步 TCP 才能成功定义并使用工具。
按下显示的工具名称旁边的铅笔选项卡可重命名工具。您还可以确定半径,允许范围是 0-300
mm。根据半径大小,限值在图形窗格中显示为一个点或一个球。
用 户 手 册 117 UR16e
22.安 全配 置
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。