99469_UR16e_User_Manual_zh_Global.pdf - 第132页
22 . 1 5. 工 具 方 向 “ 工 具 方 向 ” 屏 幕 可 用 于 限 制 工 具 指 向 的 角 度 。 该 限 值 由 一 个 锥 体 来 定 义 , 它 有 一 个 相 对 于 机 器 人 手 臂 机 座 的 固 定 方 向 。 当 机 器 人 手 臂 到 处 移 动 时 , 工 具 方 向 受 到 限 制 , 使 它 保 持 在 定 义 的 锥 体 范 围 内 。 工 具 的 默 认 方 向 与 工 具 输 出 法 …
对于用户定义的工具,用户可更改:
半径用于更改工具球的半径。当使用安全平面时将会考虑半径。当球中的某个点通过缩减模
式触发平面时,机器人将切换到
缩减
模式。安全系统会阻止球上的任何点通过安全平面( 请参
阅22.11. 平面 在本页112) 。
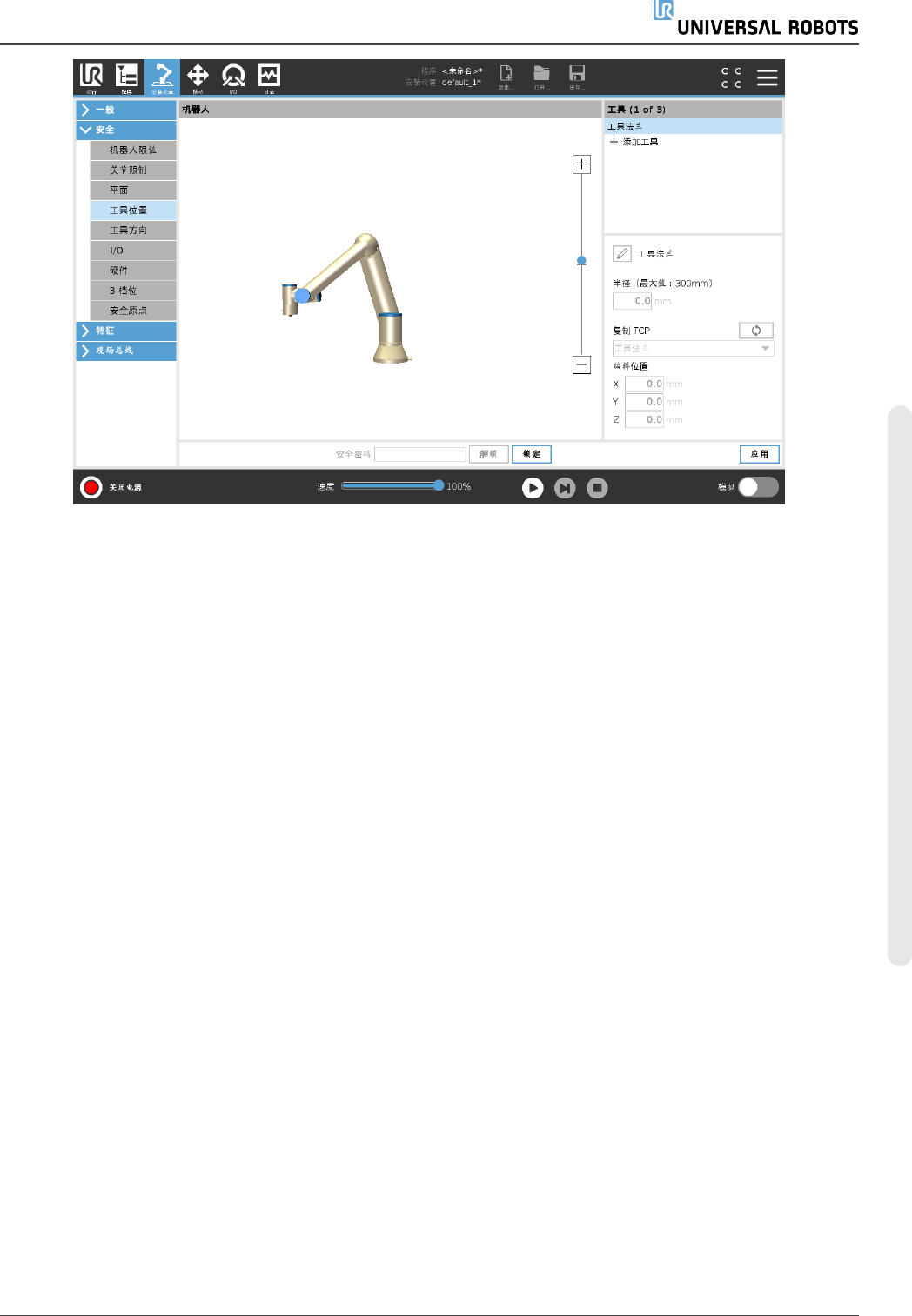
位置用于相对于机器人的工具法兰更改工具位置。针对工具速度、工具力、停止距离和安全平
面等安全功能,位置应被考虑。
您可以将现有工具中心点作为定义新工具位置的基础。在 TCP 屏幕的常规菜单中预定义的现
有 TCP 的副本可在复制 TCP 下拉列表中的工具位置菜单中找到。
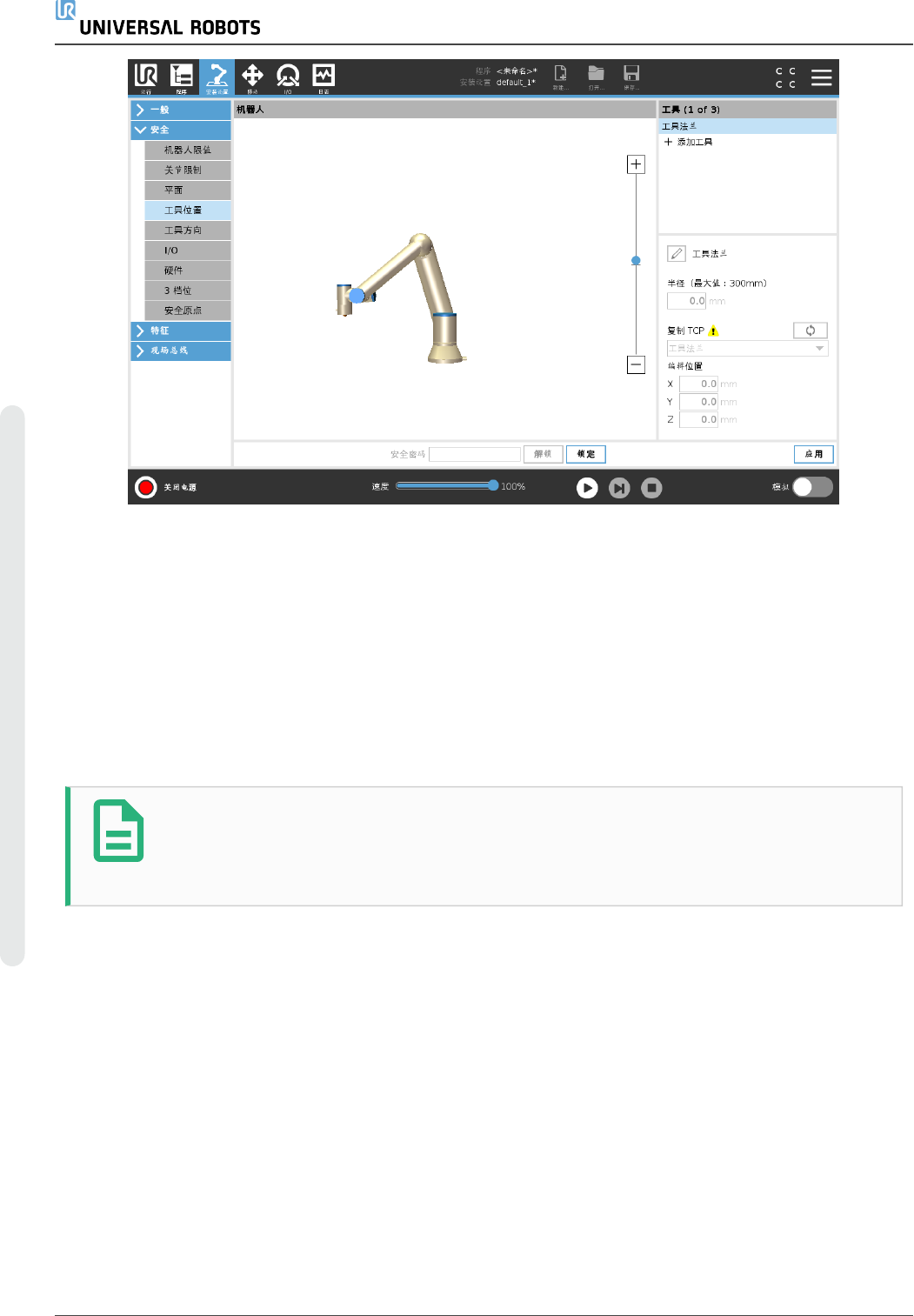
当您在编辑位置输入字段中编辑或调整值时,下拉菜单中显示的 TCP 名称会更改为自定义,
这表示复制的 TCP 与实际限值输入之间存在差异。原始 TCP 仍可在下拉列表中找到,可再次
选择以便将值更改回原始位置。复制 TCP 下拉菜单中的选择不影响工具名称。
应用“工具位置”屏幕更改后,如果您试图在 TCP 配置屏幕中修改复制的 TCP,则“复制 TCP”文
本右侧会出现一个警告图标。这表示 TCP 不同步,即:属性字段中的信息未更新以反映可能已
对 TCP 进行的修改。可以通过按同步图标来同步 TCP( 请参阅25.2. TCP 配置 在本页185) 。
并不是必须同步 TCP 才能成功定义并使用工具。
按下显示的工具名称旁边的铅笔选项卡可重命名工具。您还可以确定半径,允许范围是 0-300
mm。根据半径大小,限值在图形窗格中显示为一个点或一个球。
用 户 手 册 117 UR16e
22.安 全配 置
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
22.15. 工具方向
“工具方向”屏幕可用于限制工具指向的角度。该限值由一个锥体来定义,它有一个相对于机器
人手臂机座的固定方向。当机器人手臂到处移动时,工具方向受到限制,使它保持在定义的锥
体范围内。工具的默认方向与工具输出法兰的 Z 轴一致。它可以通过指定倾斜和平移角度来
自定义。
在配置限值之前,您必须在机器人安装设置中定义一个点或平面( 请参阅25.17. 特征 在本页
202) 。然后可复制该特征,其 Z 轴被用作定义限值的锥体中心。
提示
工具方向的配置基于特征进行。我们建议在编辑安全配置前创建目标特征,因
为一旦安全选项卡被解锁,机器人手臂将会断电,将无法定义新特征。
UR16e 118 用 户 手 册
22.安 全配 置
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
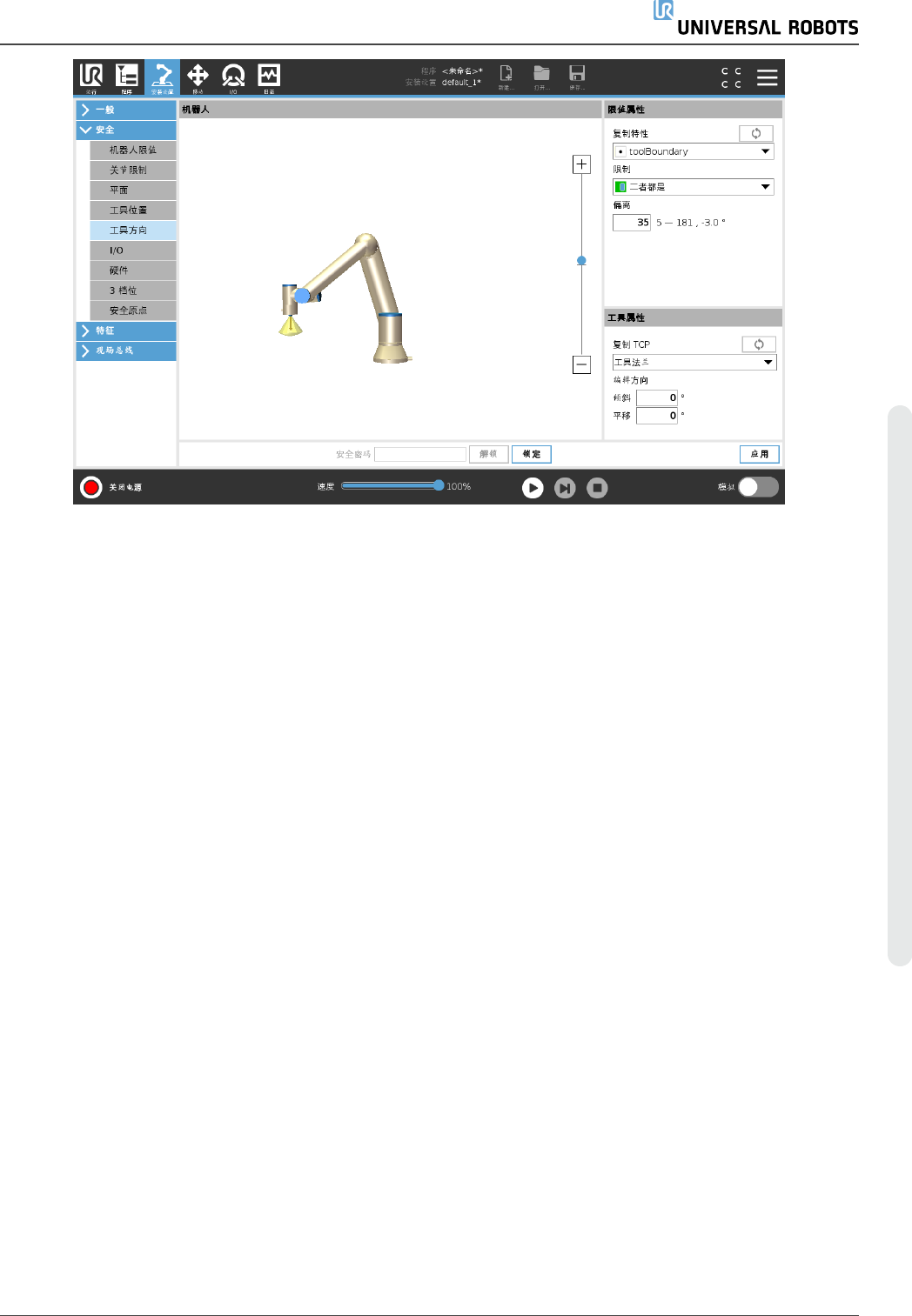
22.15.1. 限值属性
“工具方向”限值有三个可配置的属性:
1. 锥中心:您可以从下拉菜单选择一个点或平面特征来定义锥体中心。选定特征的 Z 轴被
用作锥体居中的方向。
2. 锥角度:您可以定义允许机器人偏离中心的读数。
禁用工具方向限值
从不激活
正常工具方向限值
仅当安全系统处于正常模式时才激活。
缩减工具方向限值
仅当安全系统处于缩减模式时才激活。
正常和缩减工具方向限值
当安全系统处于正常模式以及处于缩减模式时激活。
可以通过将复制特征设置回“未定义”来将值重置为默认或撤销工具方向配置。
22.15.2. 工具属性
默认情况下,工具指向同一个方向作为工具输出法兰的 Z 轴。这可以通过指定两个角度来修
改:
倾斜角度:输出法兰的 Z 轴朝输出法兰的 X 轴倾斜的角度
平移角度:绕原始输出法兰 Z 轴将倾斜的 Z 轴旋转的角度
或者,现有 TCP 的 Z 轴可通过从下拉菜单选择该 TCP 来复制。
用 户 手 册 119 UR16e
22.安 全配 置
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。