99469_UR16e_User_Manual_zh_Global.pdf - 第16页
2.1 : 机 器 手 臂 的 关 节 、 底 座 和 工 具 法 兰 。 通 过 六 个 关 节 和 广 泛 的 灵 活 性 , U ni v ersa l R o bots e 系 列 协 作 机 器 手 臂 设 计 用 于 模 仿 人 体 手 臂 的 运 动 范 围 。 使 用 我 们 的 专 利 编 程 接 口 P o ly Scop e , 可 以 轻 松 地 对 机 器 人 进 行 编 程 , 以 移 动 工 具 并 使 用…
1.前言
恭喜您购买我司研发的新一代 Universal Robots e-Series 机器人。
该机器人可通过编程来移动工具并使用电信号与其他机器进行通信。它是由挤压铝管和关节
组成的手臂。
使用我们获得专利的编程界面 PolyScope,用户可轻松地对机器人进行编程,使其沿着所需的
运动轨迹移动工具。
用 户 手 册 1 UR16e
1.前 言
版 权所 有 © 2009–2021UniversalRobotsA/S。保 留 所 有 权利。
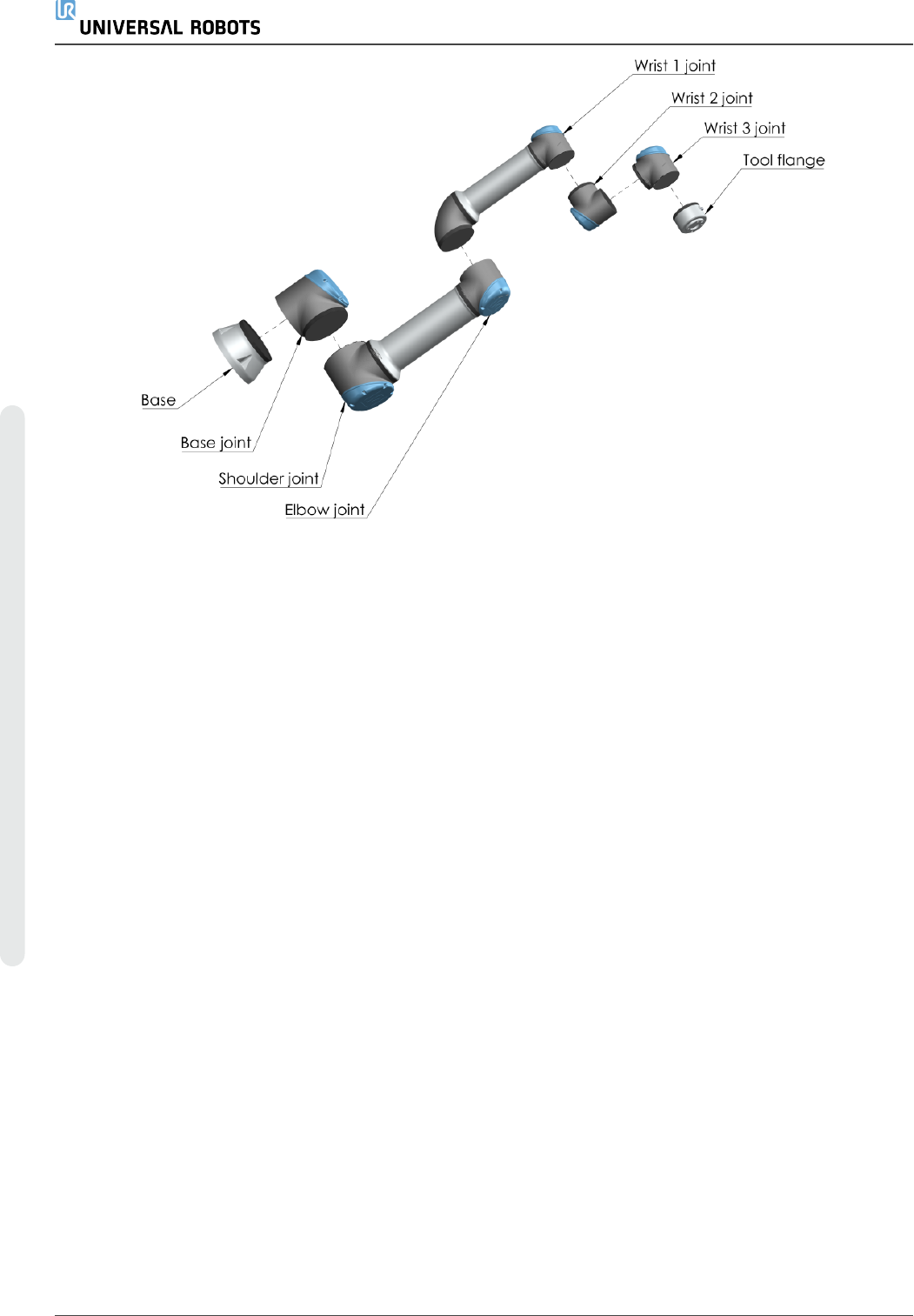
2.1:
机器手臂的关节、底座和工具法兰。
通过六个关节和广泛的灵活性,Universal Robots e 系列协作机器手臂设计用于模仿人体手臂
的运动范围。使用我们的专利编程接口 PolyScope,可以轻松地对机器人进行编程,以移动工
具并使用电子信号与其他机器进行通信。图 2.1:机器手臂的关节、底座和工具法兰。向上 显
示了机器人手臂的主要组成部分,可作为整本手册的参考。
1.1. 这些箱子里装的是什么
当您预订一个机器人时,您会收到两个箱子。一个包含机器人手臂,另一个包含:
• 带有示教盒的控制箱
• 控制箱的安装支架
• 示教盒的安装支架
• 打开控制箱的钥匙
• 用于连接机器人手臂和控制箱的电缆( 请参阅16.技术规格 在本页75中的选项)
• 电源线或电源线与您的地区兼容
• 本手册
1.2. 重要安全说明
机器人是一种半成品机械( 请参见) ,因此每次安装机器人后都必须执行安全评估。您必须遵
守2.安全 在本页7一章中的所有安全说明。
UR16e 2 用 户 手 册
1.前 言
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
1.3. 如何使用本手册
本手册包含机器人安装编程的指示信息。手册分为两部分:
硬件安装手册
机器人的机械安装和电气安装。
PolyScope 手册
机器人编程。
本手册面向的机器人集成商集成商应接受过基本的机械电气培训,并熟悉初级编程概念。
1.4. 哪里可以找到更多信息
支持网站 (http://www.universal-robots.com/support) 包含以下信息:
• 本手册的其他语言版本
• PolyScope 手册
• 服务手册,内含机器人故障诊断、维护和维修说明
• 面向高级用户的脚本手册
1.4.1. UR+
UR+ 网站 (http://www.universal-robots.com/plus/) 是一个在线展厅,提供了最先进的产品来帮助
您自定义 UR 机器人应用。您可以在一个地方找到所需的一切 - 从末端执行器和配件到视觉相
机和软件。所有产品均经过测试和认证,可与 UR 机器人集成,确保设置简单、操作可靠、用
户体验流畅、编程轻松。您还可以使用该网站加入 UR + 开发人员计划,以访问我们的新软件
平台,该平台允许您为 UR 机器人设计更加用户友好的产品。
用 户 手 册 3 UR16e
1.前 言
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。