99469_UR16e_User_Manual_zh_Global.pdf - 第184页
特 征 选 择 特 征 菜 单 用 于 选 择 机 器 人 在 力 模 式 下 工 作 时 将 使 用 的 坐 标 系 ( 轴 ) 。 菜 单 中 的 特 征 为 安 装 设 置 中 所 定 义 的 特 征 ( 请 参 阅 25.1 7. 特 征 在 本 页 202 ) 。 力 模 式 类 型 下 面 列 出 的 力 模 式 的 类 型 确 定 如 何 解 释 所 选 特 征 。 • 简 单 : 在 力 模 式 下 , 只 有 一 个 …
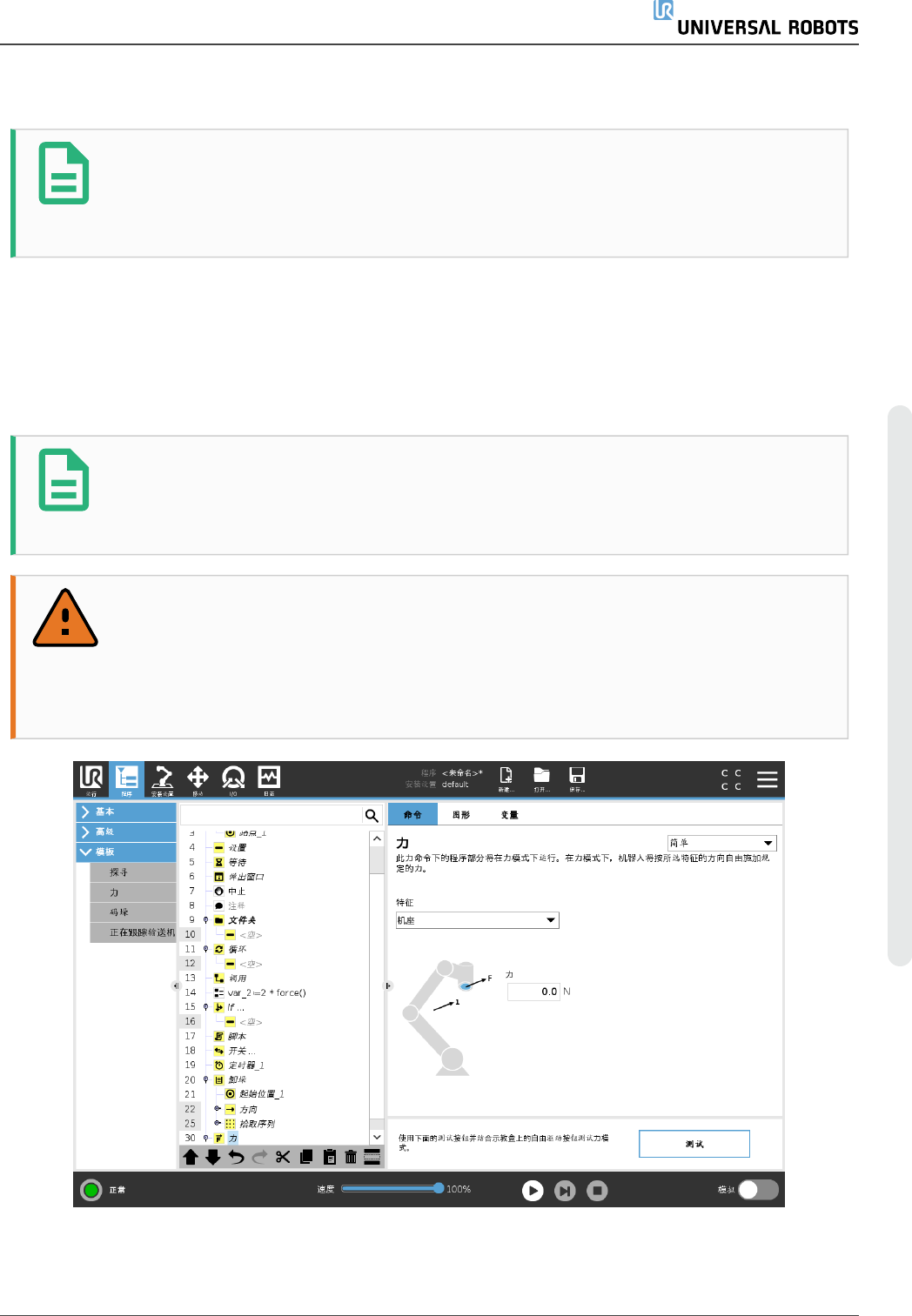
24.12.3. 力
提示
此功能如与“输送机跟踪”和/或“路径偏移”一起使用,可能会导致程序冲突。
• 请勿将此功能与“输送机跟踪”或“路径偏移”一起使用。
力模式适用于沿预定轴的实际 TCP 位置不重要,但沿着该轴所需的力必须达到的应用。例
如,如果机器人 TCP 在曲面上滚动、推动或拉动工件。
力模式还支持绕预定轴施加特定扭矩。如果在设置了非零力的轴上没有遇到障碍物,则机器
人手臂会尝试沿该轴加速。即使某个轴已被选为柔性轴,但机器人程序仍试图沿着该轴移动
机器人。但是,力控制会确保机器人手臂仍然施加接近规定的力值。
提示
如果 If、ElseIf 或 Loop 中含有力节点,并且选择了“连续检查表达式”选项,则可
以在表达式的末尾添加一个 end_force_mode() 脚本来退出力控制。
警告
1. 在进入力模式之前避免高减速度。
2. 在力模式下避免高加速度,因为它降低了力控制精度。
3. 在进入力模式之前避免平行于柔性轴的移动。
用 户 手 册 169 UR16e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
特 征 选 择
特征菜单用于选择机器人在力模式下工作时将使用的坐标系( 轴) 。菜单中的特征为安装设置
中所定义的特征( 请参阅25.17. 特征 在本页202) 。
力 模 式 类型
下面列出的力模式的类型确定如何解释所选特征。
• 简单:在力模式下,只有一个轴是柔性的。沿着该轴的力可以调节。所需的力将始终沿着
所选特征的 z 轴施加。但是,对于直线特征,会沿着他们的 y 轴施加力。
• 框架:框架类型可实现更高级的使用。在这里,所有六个自由度的柔顺性和力都可以单
独选择。
• 点:选择“点”时,任务框架会让 y 轴从机器人 TCP 指向所选特征的原点。机器人 TCP 与
所选特征原点之间的距离必须至少为 10 mm。运行过程中任务框架将随着机器人 TCP
位置的变化而变化。任务框架的 x 轴和 z 轴取决于所选特征的原始方向。
• 运动:运动表示任务框架将随 TCP 运动的方向而变化。任务框架的 x 轴将是 TCP 移动方
向投射到所选特征的 x 轴和 y 轴所决定平面上的投影。y 轴将垂直于机器人手臂运动,并
在所选特征的 x-y 平面内。此类型适用于沿复杂路径的去毛刺作业,此时需要一个垂直
于 TCP 运动的力。
当机器人手臂不移动时:如果在机器人手臂静止不动时进入力模式,则在 TCP 速度大于
零之前将没有柔性轴。如果随后依然是在力模式下机器人手臂再次站立不动,任务框架
的方向与上一次 TCP 速度大于零时的方向相同。
对于后三种类型,当机器人在力模式下工作时,运行过程中可在“图形”选项卡( 请参阅24.8. 图
形选项卡 在本页135) 上查看实际任务框架。
24.12.4. 力值选择
• 力或扭矩值可以设置为柔性轴,机器人手臂调节自身位置以达到所选的力。
• 对于非柔性轴,机器人手臂将遵循程序设置的自身轨迹。
对于平移参数,力的单位为牛顿 [N],对于旋转参数,扭矩单位为牛顿米 [Nm]。
提示
您必须按如下操作:
• 在单独的线程中使用 get_tcp_force() 脚本函数,以读取实际力和扭
矩。
• 如果实际力和/或扭矩低于要求,请更正扳手矢量。
24.12.5. 速度限值
可为柔性轴设置最大笛卡尔速度。只要不与物体接触,机器人就以力控制的速度移动。
UR16e 170 用 户 手 册
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
24.12.6. 测试力设置
标有测试的开关按钮可将示教盒背面自由驱动按钮的行为从正常自由驱动模式切换到测试力
命令。
当测试按钮开启、示教盒背面的自由驱动按钮按下时,机器人将像程序已达到此力命令一样
执行操作,这样就可以在实际运行完整程序之前验证各项设置。这一可能性对验证柔性轴和
力是否选择正确尤其有用。只需用一只手握住机器人 TCP,用另一只手按下自由驱动按钮,并
注意机器人手臂在哪些方向可以移动,在哪些方向不能移动。
离开此屏幕时,“测试”按钮会自动关闭,这意味着示教盒背面的自由驱动按钮将再次用于常规
自由驱动模式。
只有为“力”命令选择了有效特征时,自由驱动按钮才有效。
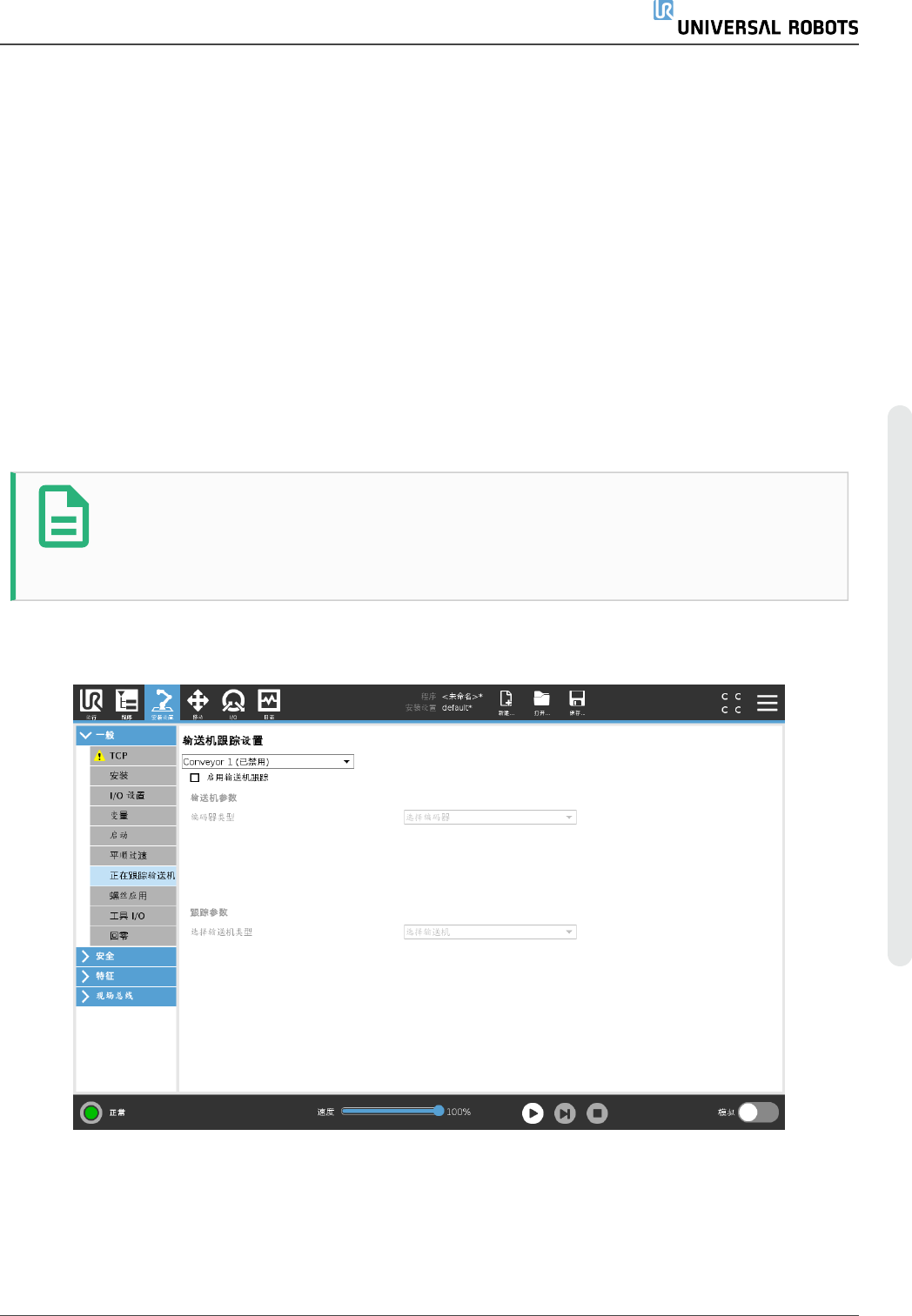
24.12.7. 正在跟踪输送机
提示
此功能如与“力”和/或“路径偏移”一起使用,可能会导致程序冲突。
• 请勿将此功能与“力”或“路径偏移”一起使用。
输送机跟踪可让机器人手臂跟踪最多两台输送机的移动。输送机跟踪在“安装设置”选项卡中
定义( 请参阅25.14. 输送机跟踪设置 在本页198一节) 。
“输送机跟踪”程序节点位于“程序”选项卡的“模板”下。当跟踪输送机时,该节点下的所有移动
都是允许的,但是要与输送机皮带的运动相关。退出输送机跟踪时不允许交融,因此机器人会
在进行下一个动作之前完全停止。
用 户 手 册 171 UR16e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。