99469_UR16e_User_Manual_zh_Global.pdf - 第188页
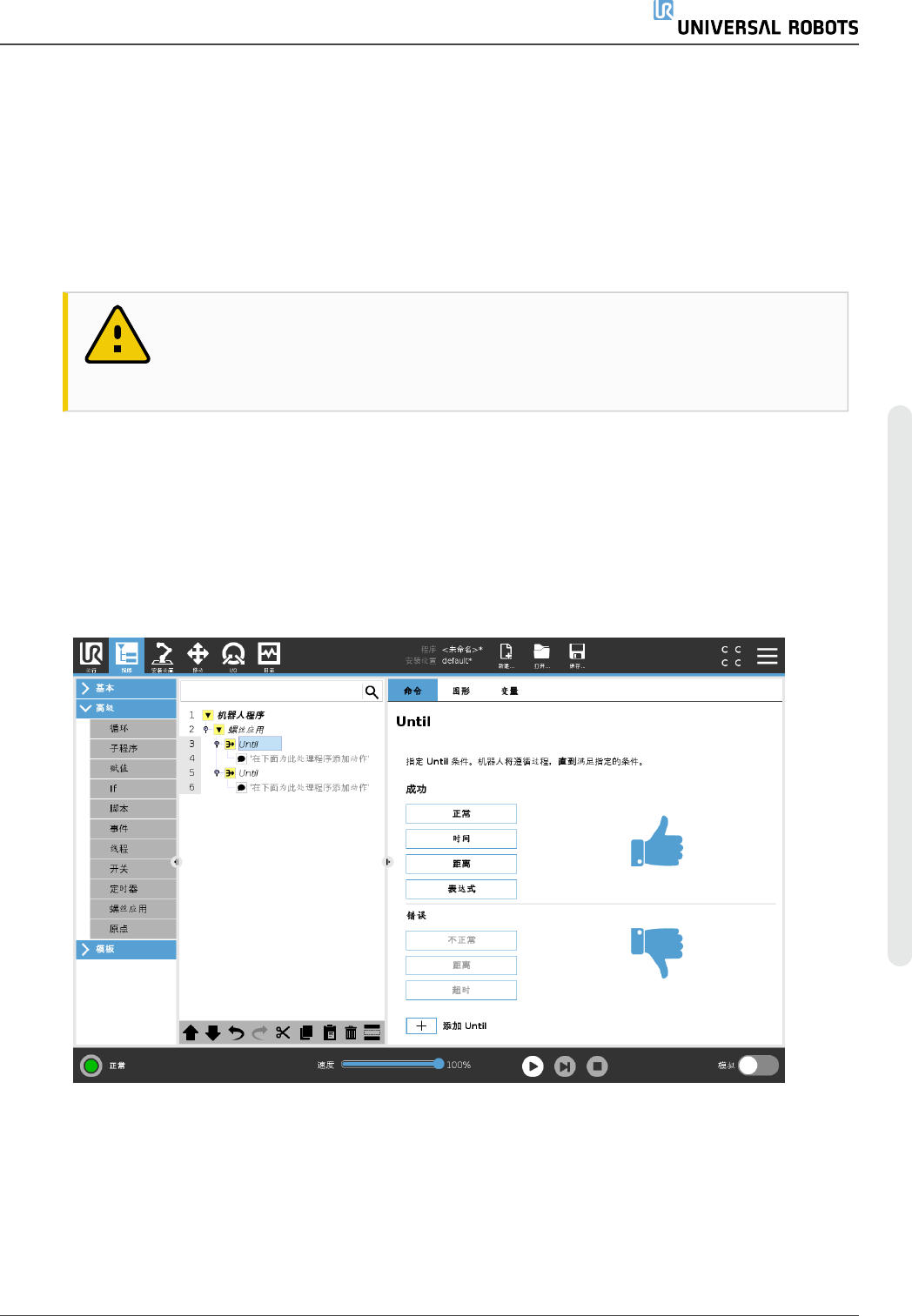
成 功 • 正 常 : 螺 丝 驱 动 将 继 续 , 直 到 检 测 到 螺 丝 刀 发 出 的 正 常 信 号 为 止 。 • 时 间 : 螺 丝 驱 动 继 续 到 规 定 的 时 间 。 • 距 离 : 螺 丝 驱 动 继 续 到 规 定 的 距 离 。 • 表 达 式 : 螺 丝 驱 动 将 继 续 , 直 到 满 足 自 定 义 的 表 达 式 条 件 。 错 误 • 不 正 常 : 当 检 测 到 螺 丝 刀 发 出 的 …
4. 在程序选择字段中,您可以根据“安装设置”中的程序选择信号选择一个螺丝刀程序。
5. 选择启用起始点,向程序树添加一个 MoveL,它将在螺丝刀运行时执行。
选择启用机器错误处理程序,在螺丝驱动动作开始之前将纠正措施添加到程序树中( 如
果需要) 。
在过程下,选择跟随螺丝,以下列方式影响螺丝驱动动作:
• 力:选择力定义施加在螺丝上的力的大小。然后选择速度限值,这样只要机器人不接触
螺丝,它就会以此速度移动。
小心
在开始螺丝驱动程序前,将螺丝刀头放在螺丝上方。对螺丝施加任何力
都会影响螺丝驱动程序的性能。
• 速度:为机器人跟随螺丝选择工具速度和加速度。
• 表达式:与 If 命令( 请参阅24.11.2. If在本页153) 类似,选择表达式来描述机器人跟随螺丝
的条件。
24.12.9. 螺丝驱动直到
螺丝驱动程序节点包括一个强制 Until 成功 Until 节点,用于为螺丝驱动过程定义停止条件。
您可以定义以下停止标准:
• 成功:螺丝驱动将继续,直到使用所选选项检测到完成为止。您只可以添加一个成功条
件。
• 错误:螺丝驱动将继续,直到使用所选选项检测到错误为止。您可以添加多于一个错误
条件。
用 户 手 册 173 UR16e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
成功
• 正常:螺丝驱动将继续,直到检测到螺丝刀发出的正常信号为
止。
• 时间:螺丝驱动继续到规定的时间。
• 距离:螺丝驱动继续到规定的距离。
• 表达式:螺丝驱动将继续,直到满足自定义的表达式条件。
错误
• 不正常:当检测到螺丝刀发出的不正常信号时,螺丝驱动将停
止。
• 距离:当超出规定的距离时,螺丝驱动将停止。
• 超时:当超出规定的时间时,螺丝驱动将停止。
24.13. URCap
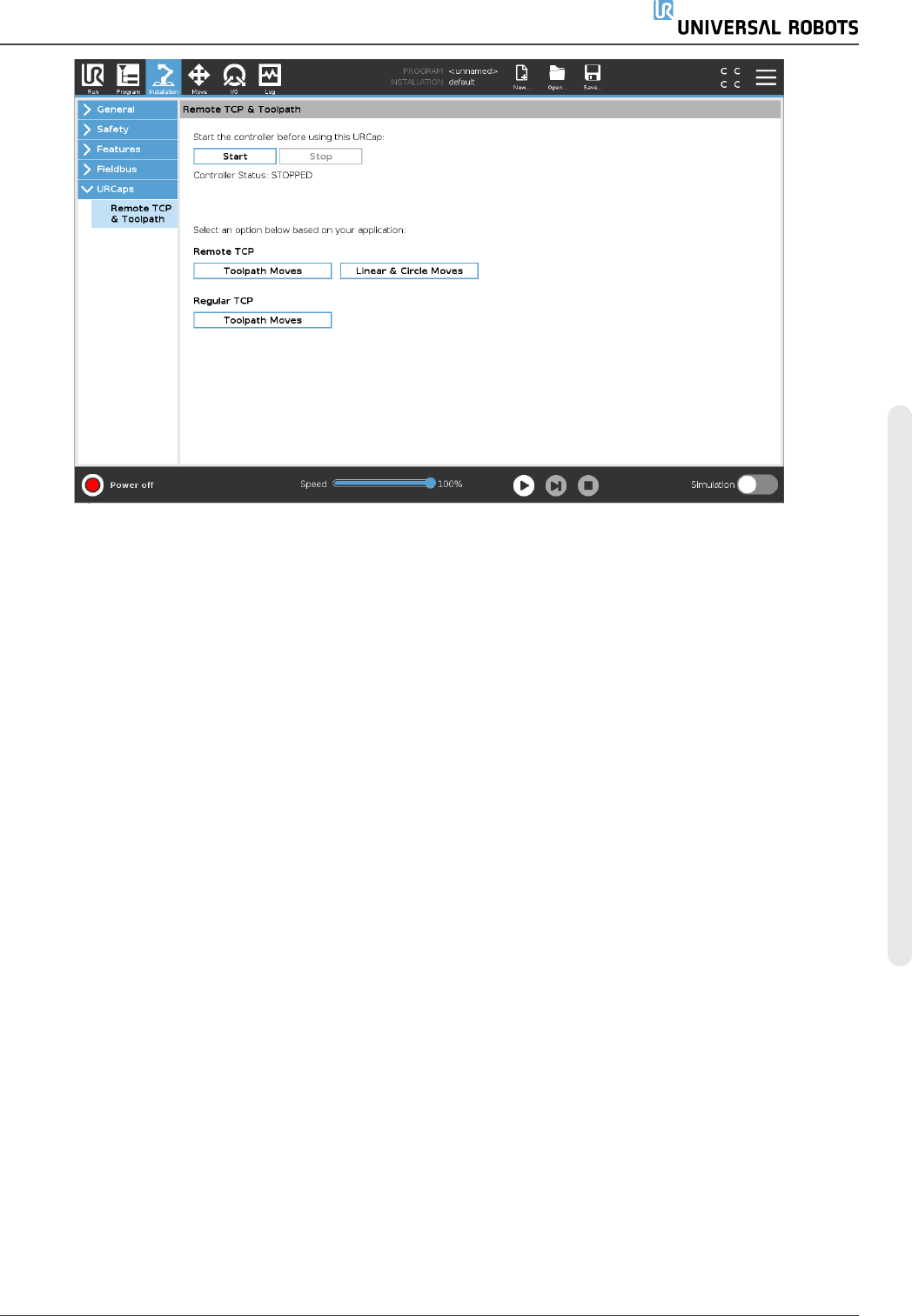
24.13.1. 远程 TCP 和工具路径 URCap
远程 TCP 和工具路径 URCap 允许您设置远程工具中心点( RTCP) ,其中工具中心点相对于机
器人基座在空间上是固定的。远程 TCP 和工具路径 URCap 还允许对路点和圆周运动进行编
程,并根据在第三方 CAD/CAM 软件包中定义的导入工具路径文件生成机器人运动。
远程 TCP URCap 要求在使用前注册您的机器人( 请参阅18.7. 机器人注册和URCap许可证文
件 在本页96) 。RTCP适用于需要机器人相对于固定工具抓取和移动物品的应用程序。RTCP
与 RTCP_MoveP 和 RTCP_CircleMove 命令一起用于相对于固定工具以恒定速度移动抓取的
零件。
UR16e 174 用 户 手 册
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
与常规 TCP( 请参阅25.2. TCP 配置 在本页185) 类似,您可以在“安装设置”选项卡的“设置”中定
义和命名 RTCP。您还可以完成以下操作:
• 添加、重命名、修改和删除RTCP
• 理解默认RTCP和激活RTCP
• 示教 RTCP位置
• 复制 RTCP方向
从 功 能 设 置 RTCP
使用功能设置RTCP,允许机器人相对于RTCP缓慢移动,同时创建RTCP路点和RTCP圆形移
动。
1. 点按加号图标创建新的 RTCP RTCP。或者在下拉菜单中选择现有的RTCP。
2. 点按从点特征复制值下拉菜单,然后选择一个特征。验证RTCP方向值更新来匹配已选
择功能方向值。
用 户 手 册 175 UR16e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。