99469_UR16e_User_Manual_zh_Global.pdf - 第193页
24. 13.5. 远 程 TCP 为 工 具 路 径 移 动 配 置 远 程 T C P 1. 在 C AM 环 境 中 的 第 一 个 路 点 , 确 定 工 具 方 向 。 2. 使 用 自 由 驱 动 和 夹 爪 手 动 抓 紧 零 件 。 3. 选 择 远 程 T CP 的 位 置 4. 使 用 位 置 向 导 获 取 正 值 。 5. 调 整 机 器 人 , 直 到 达 到 接 近 远 程 TC P 的 所 需 零 件 位 …
• 工具路径文件
• 远程 TCP
• 远程 TCP PCS
使 用 CAD/CAM 软 件 配 置 工 具 路 径
工具路径定义了工具的方向、轨迹、速度或( 进给速度) 和行进方向。
1. 创建或导入零件的 CAD 模型。
2. 设置固定到零件的零件坐标系( PCS) 。
3. 根据零件特征创建相对于PCS的工具路径
4. 模拟工具路径运动轨迹以验证其是否符合预期。
5. 将工具路径导出为扩展名为.nc的G代码文件。
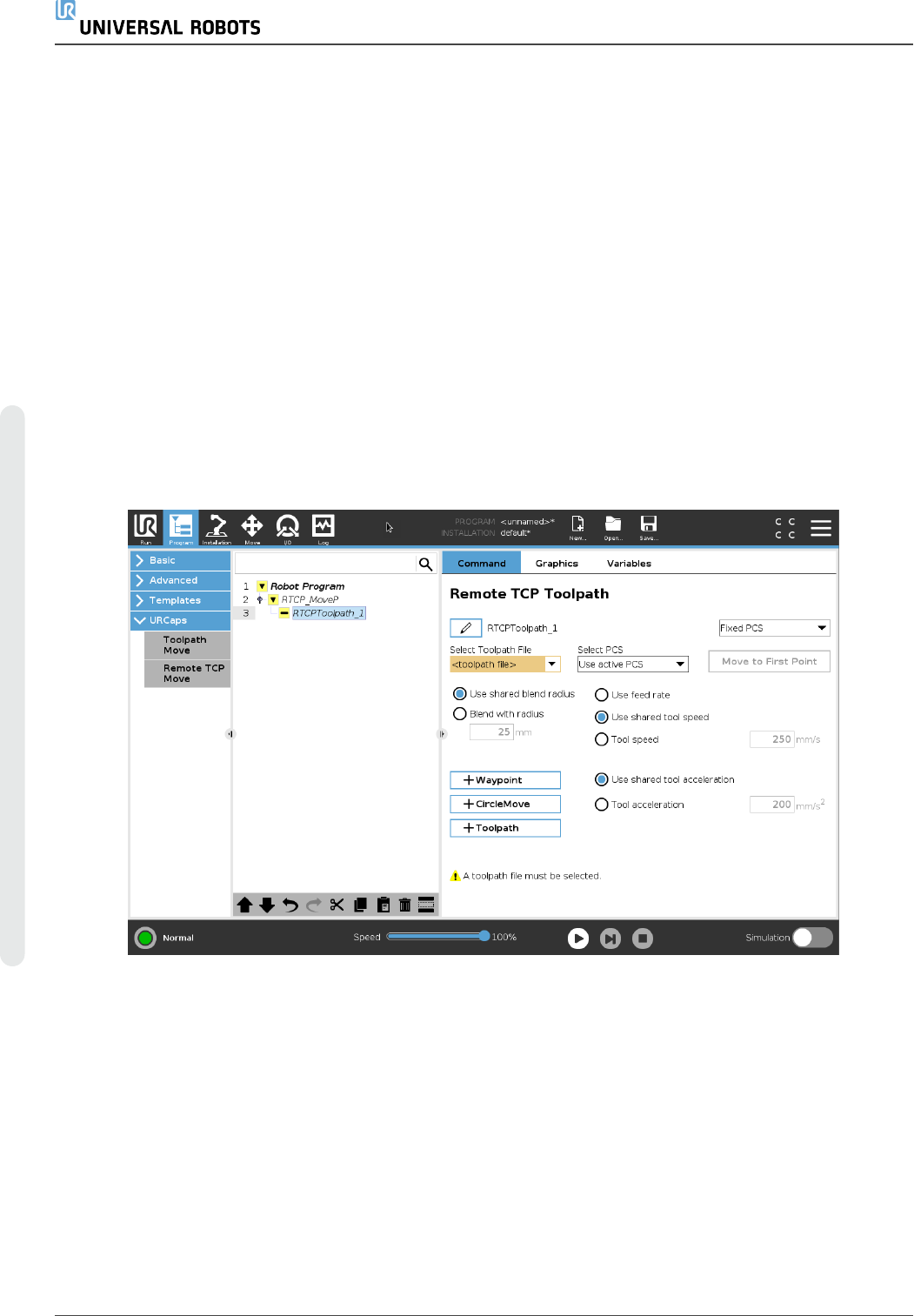
将 G代 码 工 具 路 径 导 入 PolyScope
1. 将工具路径文件加载到USB记忆棒的根目录中。工具路径文件必须是.nc扩展名
2. 将USB记忆棒插入示教盒。
3. 在页眉中,点按“安装设置”,再点按“URCaps”,然后依次选择“远程 TCP 和工具路径”、
“远程 TCP - 工具路径移动”和“工具路径”。
4. 选择要导入到Polyscope的工具路径文件。
UR16e 178 用 户 手 册
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
24.13.5. 远程 TCP
为 工 具 路 径 移 动 配 置 远 程 TCP
1. 在CAM环境中的第一个路点,确定工具方向。
2. 使用自由驱动和夹爪手动抓紧零件。
3. 选择远程 TCP 的位置
4. 使用位置向导获取正值。
5. 调整机器人,直到达到接近远程 TCP 的所需零件位姿为止。
6. 在物理零件的第一个路点上预设工具的方向。Z轴正方向应指向零件表面。
7. 以与上一步预设的相同的方向创建一个平面特征。
8. 通过复制“平面特征”中的值来设置远程TCP方向。执行工具路径时,可以保持所需的零
件位姿。
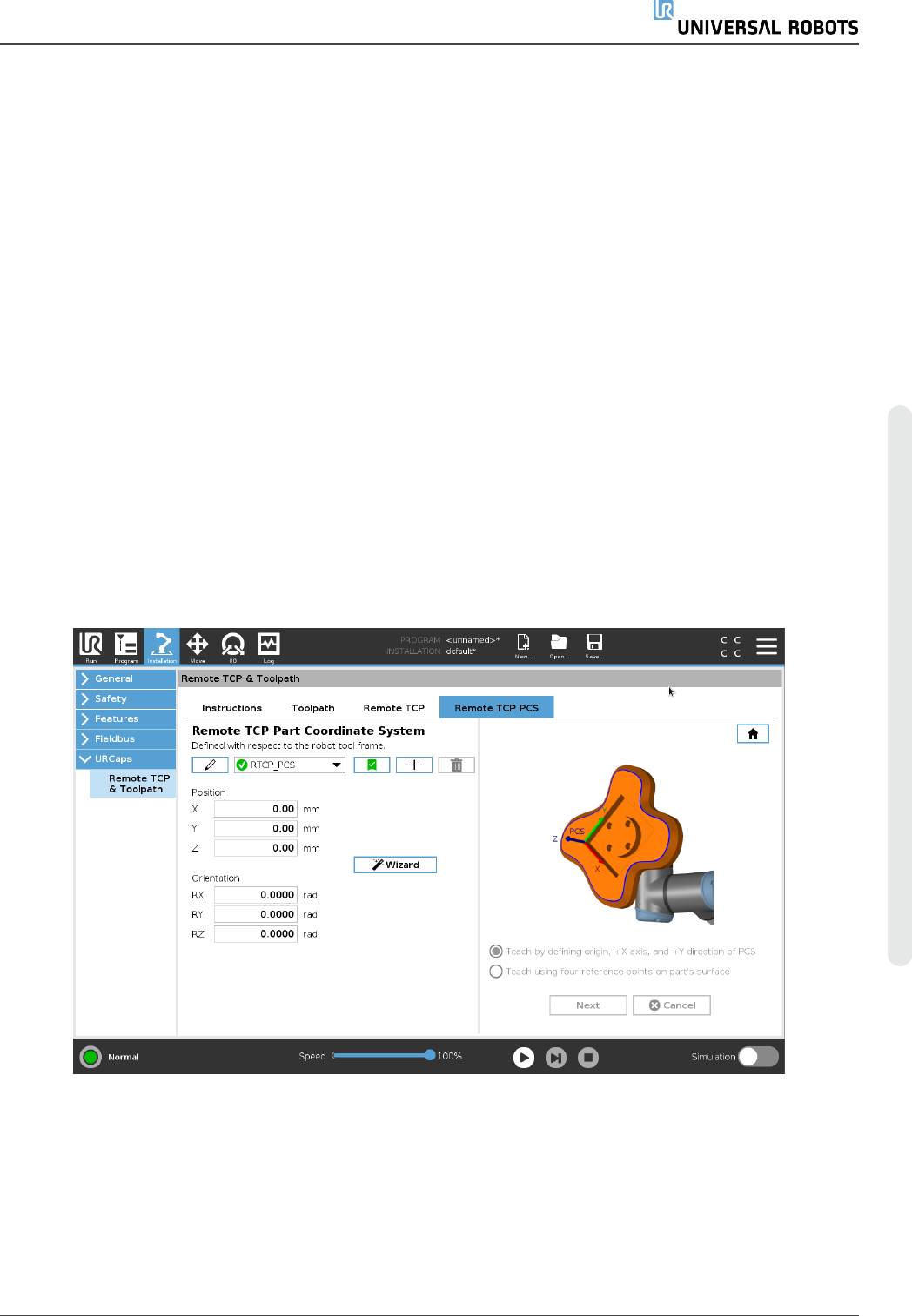
24.13.6. 远程 TCP PCS
远程TCP零件坐标系( PCS) 定义为相对于机器人工具法蘭固定。在PolyScope屏幕上点击魔
棒,以激活向导来示教远程TCP PCS。您可以使用以下任一种示教方法。
配 置 远 程 TCP PCS
如果可以在零件表面上设置 PCS,请使用此方法。
用 户 手 册 179 UR16e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
1. 使用自由驱动和抓手手动抓紧零件。
2. 选择一个远程 TCP 以示教参考点。为了获得高精度,请临时设置一个清晰的远程TCP以
完成此教学过程。
3. 慢慢移动机器人使Remote TCP接触零件上PCS的原点、正 X-轴和正 Y-轴方向。
4. 点击 设置 以结束教学过程。位置和方向值将自动填充。
如果不属于上述情况,请使用以下方法。
1. 在零件表面上选择三个或四个参考点。
2. 在 CAD/CAM 软件中,记录相对于所选参考点的PCS的X,Y,Z坐标值。
3. 使用自由驱动和夹爪手动抓紧零件。
4. 选择一个远程 TCP 以示教参考点。为了获得高精度,请临时设置一个清晰的远程TCP以
完成此教学过程。
5. 输入第一个参考点的坐标。
6. 慢慢移动机器人使Remote TCP触摸零件上的第一个参考点。
7. 对其他参考点重复步骤五和六。
设 置 可 变 PCS
对于无法以高度一致性抓取零件的高级实用案例,您可以设置一个变量PCS来根据零件相对
于机器人工具法兰的位置和方向来调整工具路径移动。您可以创建与外部传感器绑定的位姿
变量,该传感器可以检测PCS的位置和方向。
1. 设置一个检测PCS位置和方向的外部传感器。您必须将传感器输出转换为机器人工具的
法兰架。
2. 确认已相对于零件设置了PCS,并且外部传感器可以检测到位置和方向。
3. 在PolyScope中,创建与外部传感器输出绑定的位姿变量作为变量PCS。为其指定一个易
于区别的名称,如 variable_rtcp_pcs_1。
4. 插入 RTCP 工具路径节点。
5. 在程序页面右上角的下拉菜单中,选择变量 PCS。
6. 在选择 PCS 下拉菜单中,选择 variable_rtcp_pcs_1。
7. 在 RTCP 工具路径节点之前创建一个分配或脚本节点,以更新 variable_rtcp_pcs_1。
下节说明如何在远程 TCP 工具路径节点中使用变量PCS。
UR16e 180 用 户 手 册
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。