99469_UR16e_User_Manual_zh_Global.pdf - 第219页
13. 3 : D e fin it io n of the li ne featu re 在 图 13. 3 中 , 从 第 一 点 指 向 第 二 点 的 轴 构 成 了 直 线 坐 标 系 的 y 轴 。 z 轴 由 p1 的 z 轴 在 垂 直 于 直 线 的 平 面 上 的 投 影 定 义 。 直 线 坐 标 系 的 位 置 与 p1 的 位 置 相 同 。 25. 17.5. 平 面 特 征 当 您 需 要 高 精 度 框 …
如果机器人手臂无法达到此特征,移至此处将被禁用。
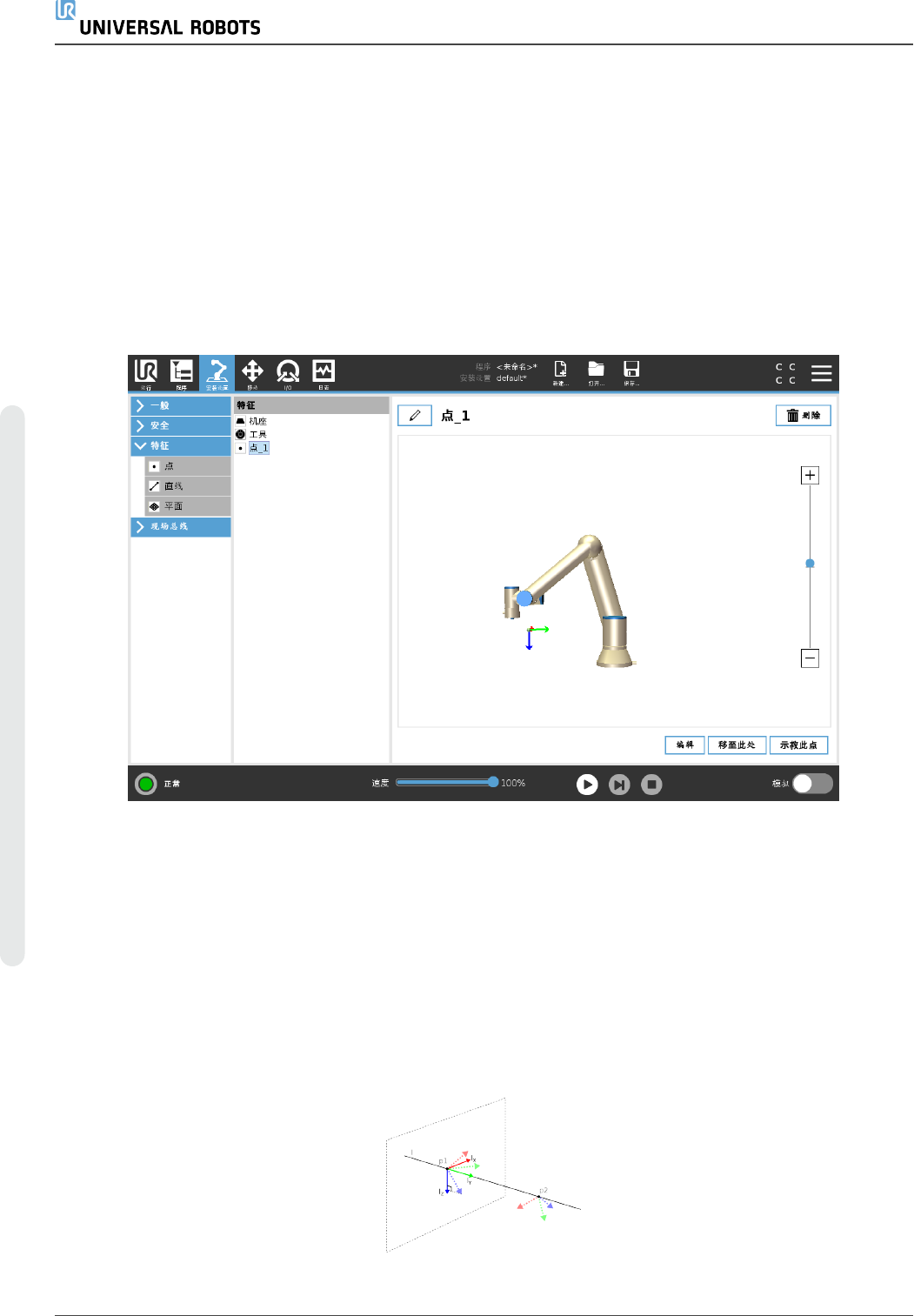
25.17.3. 点特征
点特征定义机械手臂的安全边界或全局主配置。点特征的位置由 TCP 的位置来定义。
添 加 点
1. 在“安装设置”中,选择特征。
2. 在“特征”下,选择点。
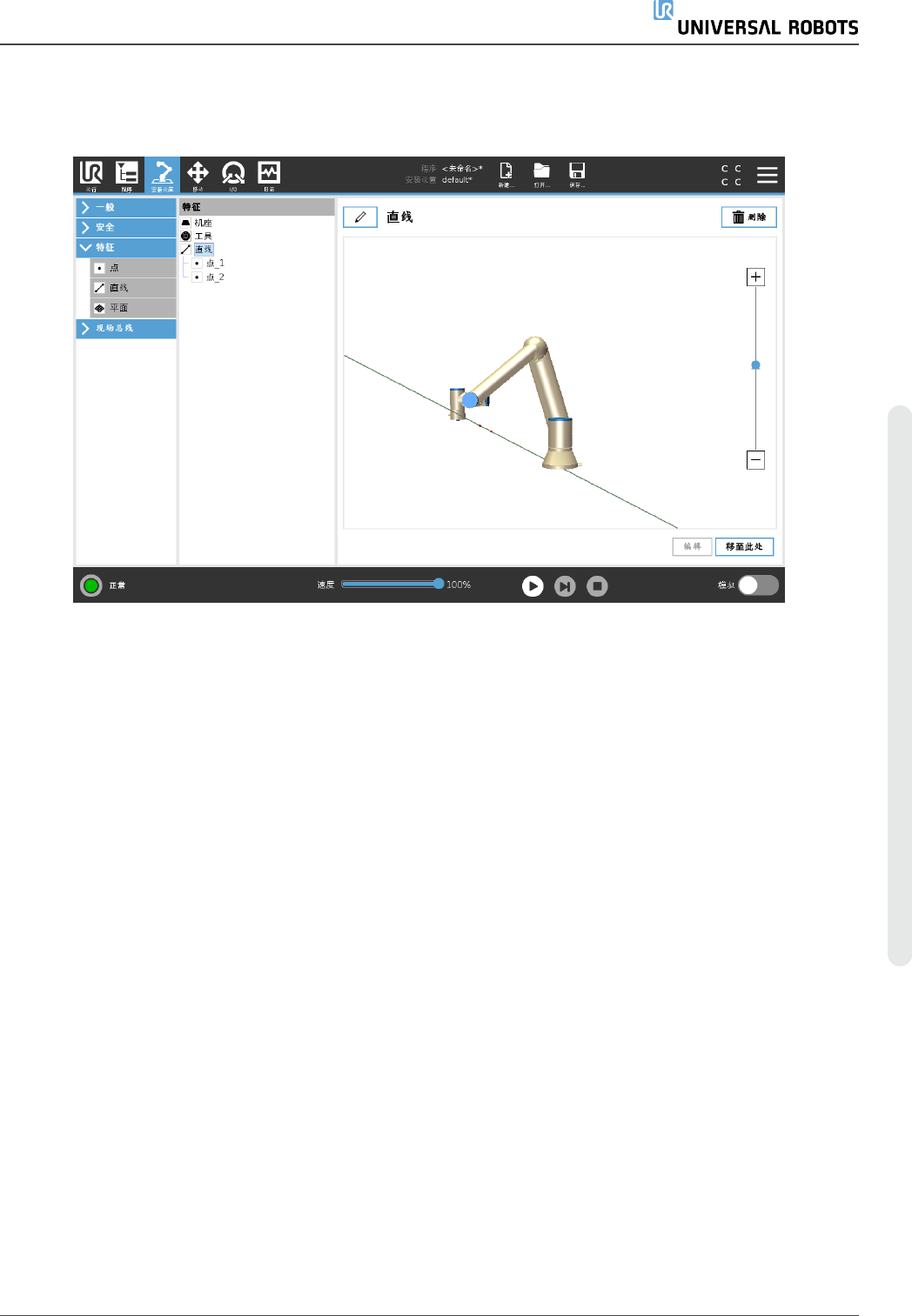
25.17.4. 直线特征
线特征定义了机器人需要遵循的线。( 例如:当使用输送机跟踪时) 。直线
l
定义为两个点特征
p1
和
p2
之间的一个轴,如图 13.3 所示。
添 加 线
1. 在“安装设置”中,选择特征。
2. 在“特征”下,选择直线。
UR16e 204 用 户 手 册
25.安 装设 置选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
13.3:
Definition of the line feature
在图 13.3 中,从第一点指向第二点的轴构成了直线坐标系的 y 轴。z 轴由
p1
的 z 轴在垂直于直
线的平面上的投影定义。直线坐标系的位置与
p1
的位置相同。
25.17.5. 平面特征
当您需要高精度框架时选择平面特征:例如:当使用观察系统或相对于桌子进行移动时。
添 加 平 面
1. 在“安装设置”中,选择特征。
2. 在“特征”下,选择平面。
示 教 平 面
按平面按钮创建新平面时,屏幕上的指南可帮助您创建平面。
1. 选择 Origo
2. 移动机器人以定义平面的正 x-轴方向
3. 移动机器人以定义平面的正 y-轴方向
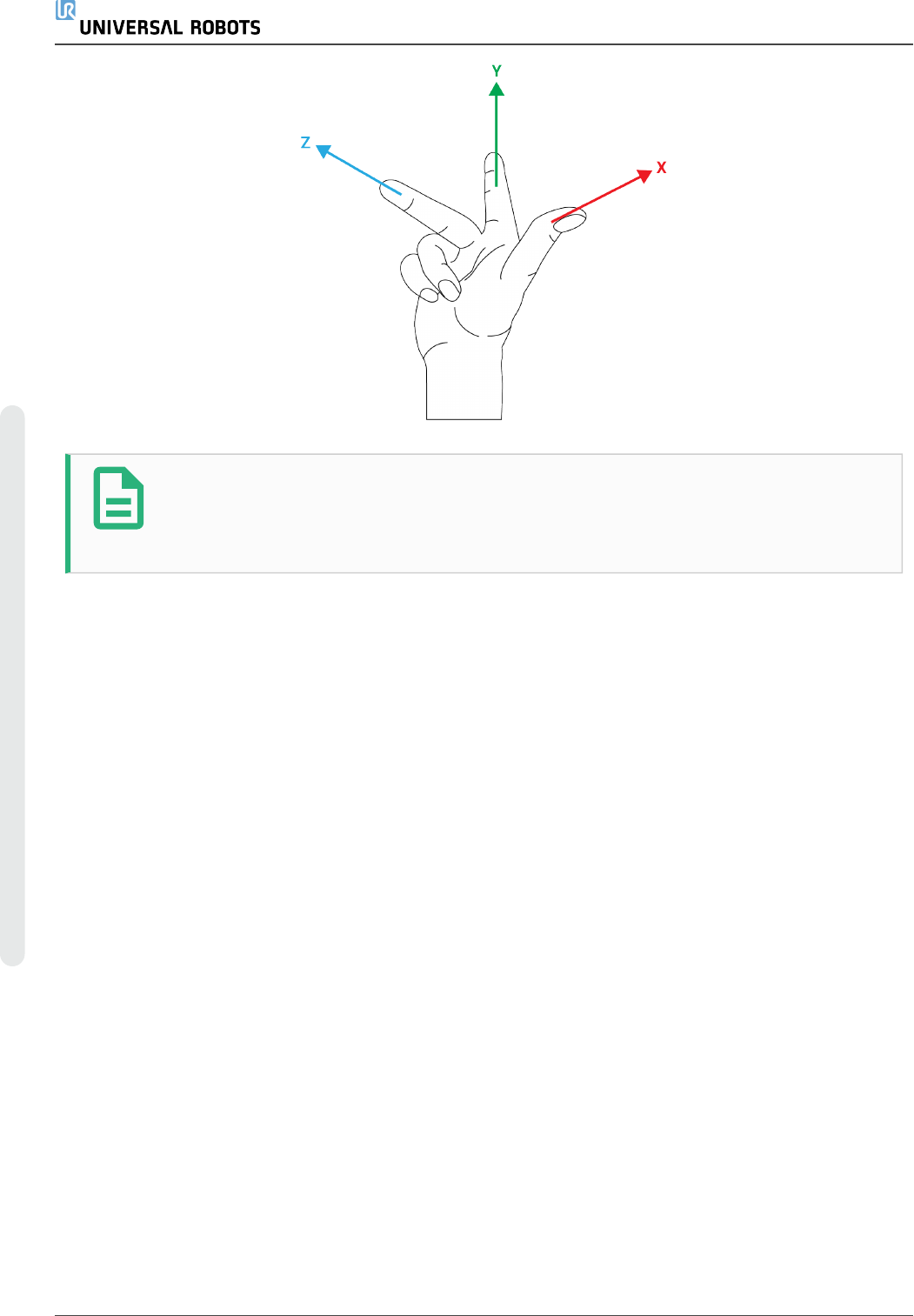
平面使用右手定则定义,因此 z-轴是 x-轴和 y-轴的叉积,如下所示。
用 户 手 册 205 UR16e
25.安 装设 置选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。