99469_UR16e_User_Manual_zh_Global.pdf - 第237页
28 . 日 志 选 项 卡 日 志 选 项 卡 显 示 机 器 人 手 臂 和 控 制 箱 的 相 关 信 息 。 28 . 1 . 读 数 和 关 节 负 载 “ 读 数 ” 窗 格 显 示 控 制 箱 信 息 。 “ 关 节 载 荷 ” 窗 格 显 示 每 个 机 器 人 手 臂 关 节 的 信 息 。 每 个 关 节 显 示 : • 温 度 • 载 荷 • 状 态 • 电 压 28 . 2 . 数 据 日 志 第 一 列 显…
UR16e 222 用 户 手 册
27.I/O 选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
28.日志选项卡
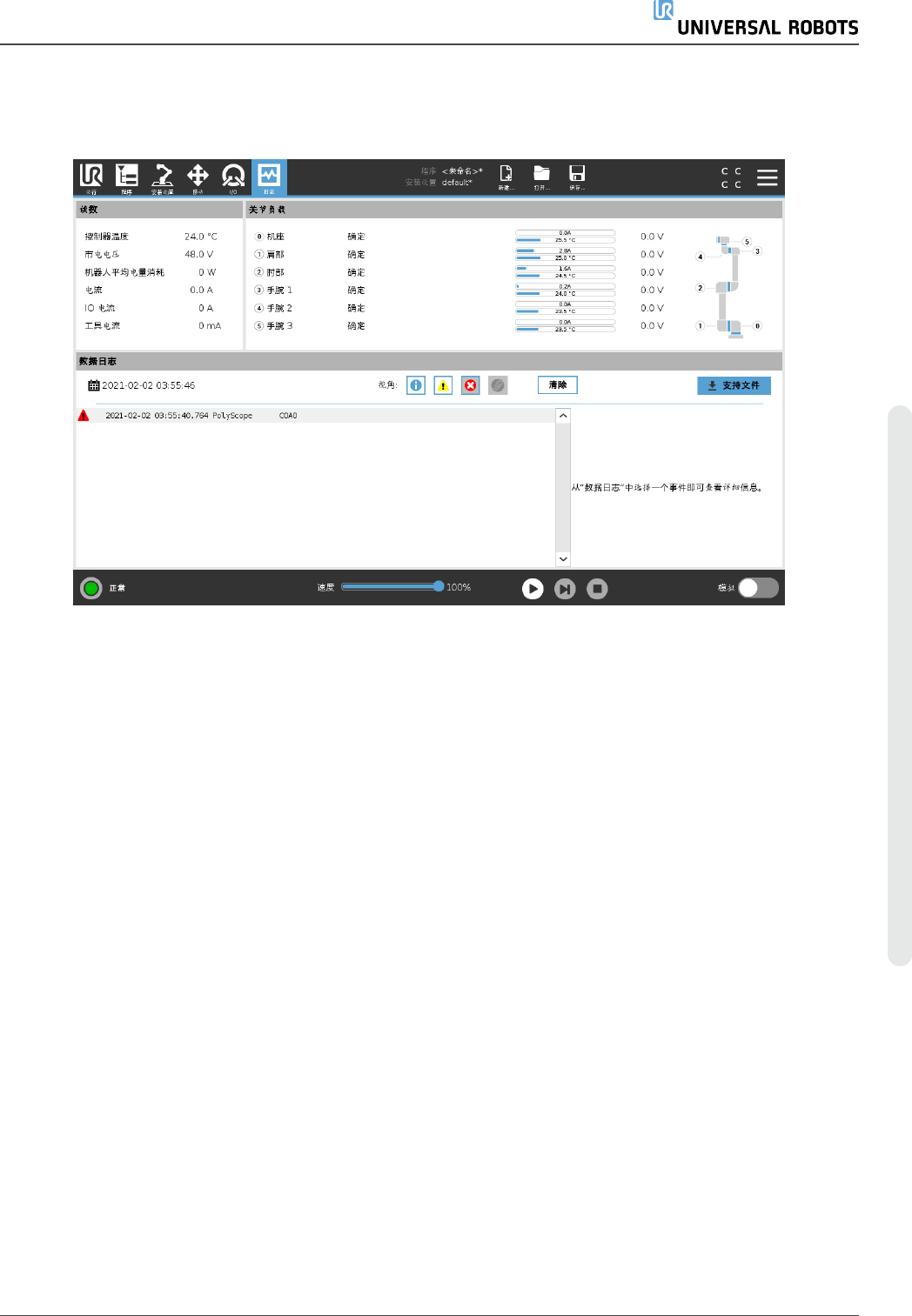
日志选项卡显示机器人手臂和控制箱的相关信息。
28.1. 读数和关节负载
“读数”窗格显示控制箱信息。“关节载荷”窗格显示每个机器人手臂关节的信息。每个关节显示:
• 温度
• 载荷
• 状态
• 电压
28.2. 数据日志
第一列显示按严重性分类的日志条目。如果存在与日志条目关联的错误报告,则第二列会显
示回形针。接下来的两列显示了消息的到达时间和消息的来源。最后一列显示了消息本身的
简短描述。
一些日志消息的设计初衷就是提供更多信息,选定日志记录之后显示在右侧。
消 息 严 重 性
您可以通过选择与日志条目的严重性相对应的切换按钮或按是否存在附件来筛选消息。下表
介绍了消息严重性。
用 户 手 册 223 UR16e
28.日 志选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
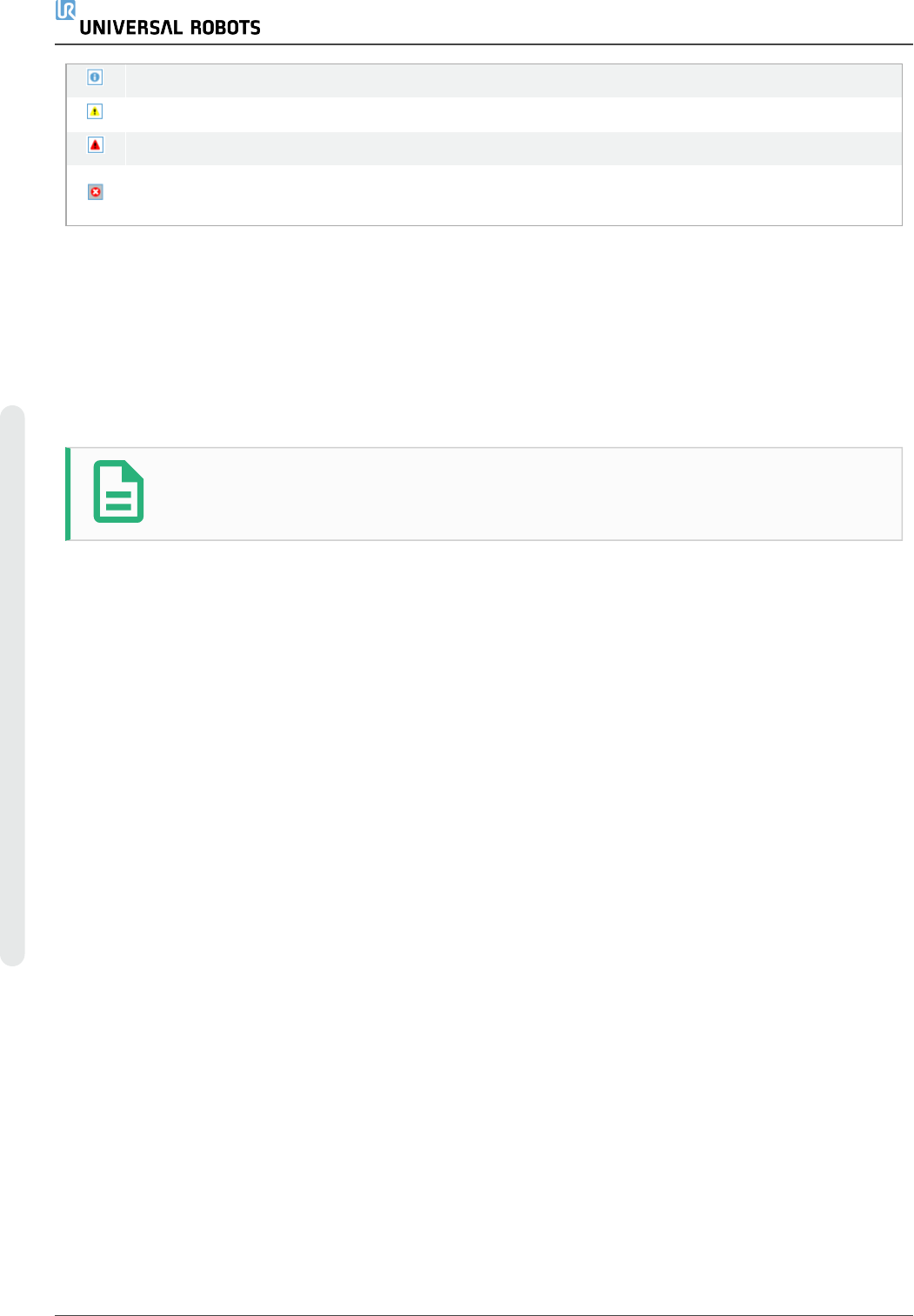
提供常规信息,例如程序状态、控制器更改和控制器版本。
可能已发生但系统能够恢复的问题。
如果超出安全限制,则会发生违规行为。这会使得机器人执行安全额定停止。
如果系统中存在不可恢复的错误,则会发生故障。这会使得机器人执行安全额定停
止。
当您选择日志条目时,屏幕右侧会显示附加信息。选择附件筛选器时,要么只显示条目附件,
要么显示所有条目。
28.3. 保存错误报告
当日志行中出现回形针图标时,可以使用详细的状态报告。
提示
生成一个新报表时,最旧的报表将被删除。只有最近的五个报告被存储。
1. 选择日志行并点击保存报告按钮将报告保存到 USB 驱动器。
您可以在程序运行时保存报告。
您可以跟踪和导出以下错误列表:
• 紧急停止
• 故障
• 内部 PolyScope 例外
• 保护性停止
• URCap 中未处理的异常
• 违例
导出的报告包含用户程序、历史日志、安装和运行服务列表等。
28.4. 技术支持文件
报告文件包含有助于诊断和重现问题的信息。该文件包含先前机器人故障的记录,以及当前
机器人配置、程序和安装设置。报告文件可以保存到外部 USB 驱动器中。在“日志”屏幕上,点
按支持文件,然后按照屏幕上的说明操作即可访问该功能。
UR16e 224 用 户 手 册
28.日 志选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。