99469_UR16e_User_Manual_zh_Global.pdf - 第31页
安 全 功 能 公 差 性 能 等 级 类别 安 全 平 面 40 m m d 3 工 具 方 向 3 ° d 3 速 度 限 值 50 m m/s d 3 力 限 值 25 N d 3 动 量 限 值 3 k g m/s d 3 功 率 限 值 10 W d 3 停 止 时 间 限 值 50 m s d 3 停 止 距 离 限 值 40 m m d 3 Safe H om e 1.7 ° d 3 警 告 在 设 计…
3.3. 可配置安全功能
下表列出的 Universal Robots 机器人安全功能位于机器人中,但其目的是控制机器人系统,即
机器人及其连接的工具/末端执行器。机器人安全功能用于减少由风险评估确定的机器人系统
风险。位置和速度与机器人的底座有关。
安全功
能
描述
关节位
置限值
设置允许的关节位置的上下限。
关节速
度限值
设置关节速度的上限。
安全平
面
定义限制机器人位置的空间平面。安全平面可以只限制工具/末端执行器,或同时限
制工具/末端执行器和肘部。
工具方
向
为工具定义允许的方向限制。
速度限
值
限制机器人最大速度。肘部、工具/末端执行器法兰以及用户定义的工具/末端执行
器位置中心的速度受到限制。
力限值
限制机器人工具/末端执行器和肘部在夹紧情况中施加的最大力。工具/末端执行
器、肘部法兰以及用户定义的工具/末端执行器位置中心的力受到限制。
动量限
值
限制机器人的最大动量。
功率限
值
限制机器人做的机械功。
停止时
间限值
限制机器人在启动保护性停止后用于停止的最长时间。
停止距
离限值
限制机器人在启动保护性停止后移动的最大距离。
执行应用风险评估时,有必要考虑启动停止后机器人的运动。为了简化该过程,可以使用
停止
时间限制
和
停止距离限制
这两个安全功能。
这些安全功能可动态降低机器人运动的速度,使其始终能够在极限范围内停止。关节位置限
制、安全平面以及工具/末端执行器方向限制考虑了预期的停止距离移动,即即机器人的运动
速度会在达到限制之前减慢。
功能安全可以概括为:
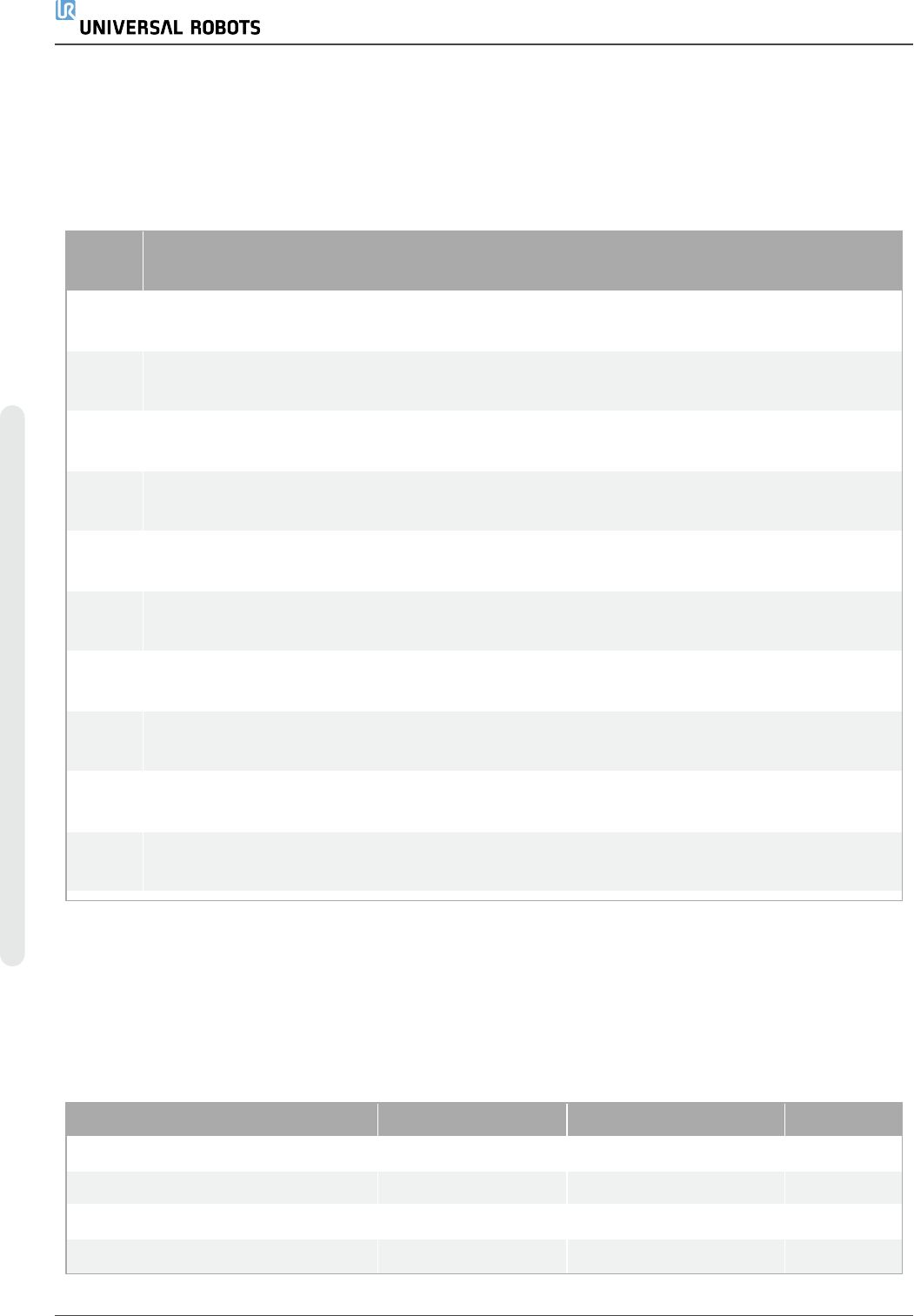
安全功能 公差 性能等级 类别
紧急停止 – d 3
防护停止 – d 3
关节位置限值 5° d 3
关节速度限值 1.15°/s d 3
UR16e 16 用 户 手 册
3.安 全相 关的 功能 和接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
安全功能 公差 性能等级 类别
安全平面 40mm d 3
工具方向 3° d 3
速度限值 50mm/s d 3
力限值 25N d 3
动量限值 3kg m/s d 3
功率限值 10W d 3
停止时间限值 50ms d 3
停止距离限值 40mm d 3
Safe Home 1.7° d 3
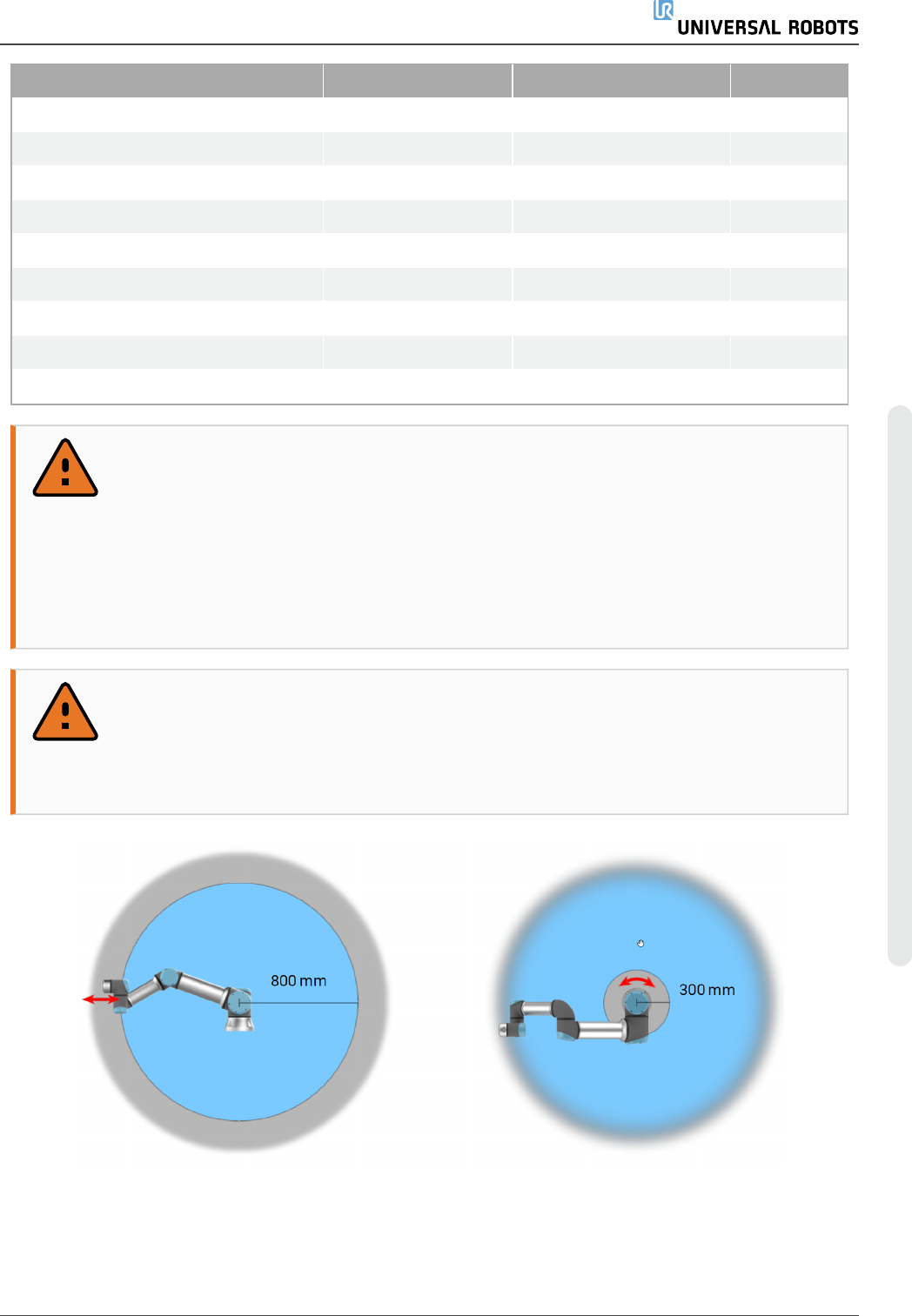
警告
在设计应用时,关于力的限制功能有两种例外情况很重要( 图 4.1) 。在机器人
向外伸展时,膝-关节效应可能导致以低速径向( 远离底座) 产生较高的力。同
样,短杠杆臂在工具/末端执行器靠近底座和在底座周围移动时,可能以低速产
生较高的力。通过清除这些区域的障碍物、将机器人放在其他位置,或结合利
用安全平面与关节限制等措施,防止机器人进入工作区的此区域,可规避夹伤
风险。
警告
如果机器人用于用手引导的手动应用( 线性移动) ,则工具/末端执行器和肘部
的速度限值必须设为最大 250 mm/s,除非风险评估显示可接受更高的速度。这
可以防止机器人肘部在奇点附近快速运动。
4.1:
由于机器人手臂的物理特性,某些工作区需要注意夹伤危险。其中一个区域( 左) 是定
义的径向运动区域,即手腕 1 关节与机器人机座至少相距 800mm 的区域。另一个区域( 右)
是在机器人机座 300mm 范围内的区域( 机器人按正切方向移动时) 。
用 户 手 册 17 UR16e
3.安 全相 关的 功能 和接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
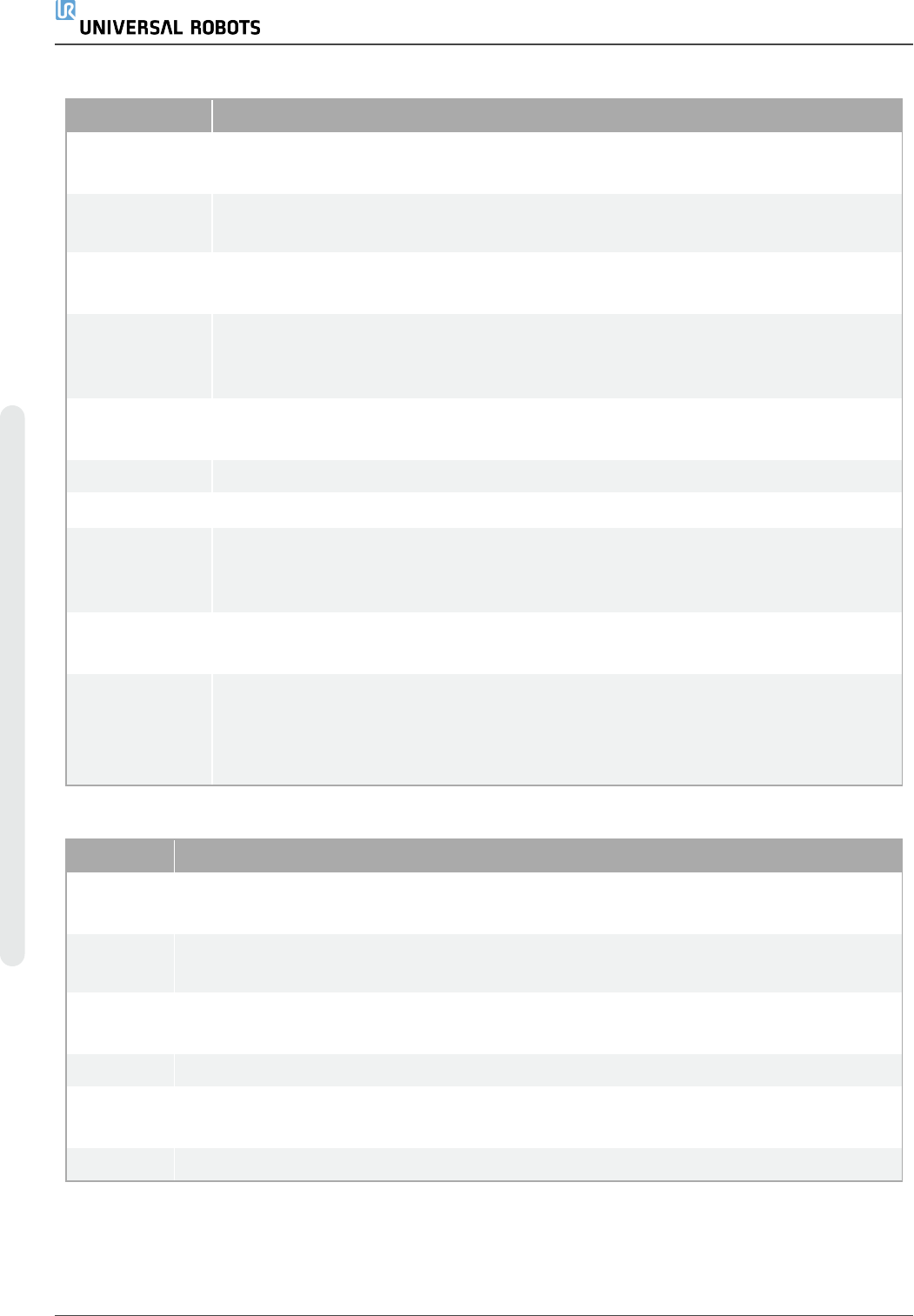
机器人还具有以下安全输入:
安全输入 描述
紧急停止按钮
执行 1 类停机 (IEC 60204-1) ,利用
系统紧急停止
输出通知其他机器( 如果已
定义该输出) 。连接到输出的任何物体都会启动停止。
机器人紧急停
止
通过控制箱输入执行 1 类停机 (IEC 60204-1),利用
系统紧急停止
输出通知其
他机器( 如果已定义该输出) 。
系统紧急停止
在所有模式下仅对机器人执行 1 类停机 (IEC 60204-1),并且优先于所有其他
命令。
防护停止
在所有模式下执行 2 类停机 (IEC 60204-1),但使用 3 档位使动装置和模式选
择器时除外。在手动模式下时,可以将“防护停止”设置为仅在自动模式下有
效。
自动模式防护
停止
仅在自动模式下执行 2 类停机 (IEC 60204-1)。只有 3 档位使动装置已配置并
安装,才可以选择
自动模式防护停止
。
防护重置 当防护重置输入出现上升沿时,从
防护停止
状态返回。
缩减模式 将安全系统过渡为使用
缩减模式
限值。
3 档位使动装
置
仅当使动装置在手动模式下完全按下或完全释放时才启动 2 类停机 (IEC
60204-1)。当输入为低时,触发3 档位使动装置停止。它不受防护重置的影
响。
操作模式
操作模式间的切换。当输入信号为低电平时,机器人将处于自动模式,当输
入信号为高电平时,机器人处于手动模式。
Automatic
Mode
Safeguard
Reset
当自动模式防护重置输入出现上升沿时,从
自动模式防护停止
状态返回。
为了与其他机器连接,机器人配有以下安全输出:
安全输出 描述
系统紧急
停止
当此信号为逻辑低电平时,
机器人紧急停止
输入为逻辑低电平或按下紧急停止
按钮。
机器人运
动
当此信号为逻辑高电平时,机器人单个关节的移动速度均不会超过 0.1rad/ s。
机器人未
停止
当由于紧急停止或防护停止而使机器人停止或处于停止过程中时为逻辑高电
平。否则将为逻辑低电平。
缩减模式 当安全系统处于缩减模式时为逻辑低电平。
非缩减模
式
当系统未处于缩减模式时为逻辑低电平。
Safe Home 当机器人处于设置的安全回零位置时逻辑高。
所有安全 I/O 均为双通道,这意味着它们在低电平时是安全的( 例如,当信号为低电平时,紧急
停止处于激活状态) 。
UR16e 18 用 户 手 册
3.安 全相 关的 功能 和接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。