99469_UR16e_User_Manual_zh_Global.pdf - 第40页
6.2 : 工 具 输 出 法 兰 ( ISO 94 09-1-5 0-4-M6) 是 机 器 人 顶 端 的 工 具 安 装 位 置 。 所 有 测 量 值 均 以 mm 为 单 位 。 控 制 箱 控 制 箱 既 可 以 悬 挂 在 墙 壁 上 , 也 可 以 安 放 在 地 面 上 。 控 制 箱 每 侧 应 留 出 50 mm 的 空 隙 , 以 确 保 空 气 流 通 顺 畅 。 示 教 盒 示 教 盒 可 以 悬 挂 在 墙…
120
10
8 FG8
+
+
0.030
0.008
8.5 min.
8 FG8
+
+
0.024
0.006
x 13
8.5 min.
4 x
8.4
170
45°
S
2x 5
±1
Surface on which the robot is fitted
0.05
D
E
F
C
1
2
3
4
B
A
3
2
1
5
C
D
4
6
7
8
A
B
A3
UL class
PROPRIETARY AND CONFIDENTIAL
THE INFORMATION CONTAINED IN THIS
DRAWING IS THE SOLE PROPERTY OF UNIVERSAL
ROBOTS. ANY REPRODUCTION IN PART OR AS A
WHOLE WITHOUT THE WRITTEN PERMISSION OF
UNIVERSAL ROBOTS IS PROHIBITED
REV.
TEL: +45 89 93 89 89 FAX: +45 38 79 89 89 WEB: universal-robots.com
APP.
Engineer:
SIZE
SHEET 1 OF 1
SCALE:1:2
DWG NO.
TITLE:
DATE
NAME
Revision History:
731470
EN AW-6082 T6
1470.15 g
2014-06-16
Flange Base UR10 G5
UNLESS OTHERWISE SPECIFIED:
Dimensions are in millimeters
RoHS compliant (PB free)
Cleaned for chips and oil
NAME
DATE
Drawing
Approved
TOLERANCE
SURFACE FINISH
TREATMENT
MATERIAL
WEIGHT
PROJECTION:
DATE
2014-06-16
+/- 0,1 mm +/- 0,5°
Ra 1,6
Anodized nature 10-20µ
jmi
Status change date:
Replace drawing:
-0,1
+0,3
-0,3
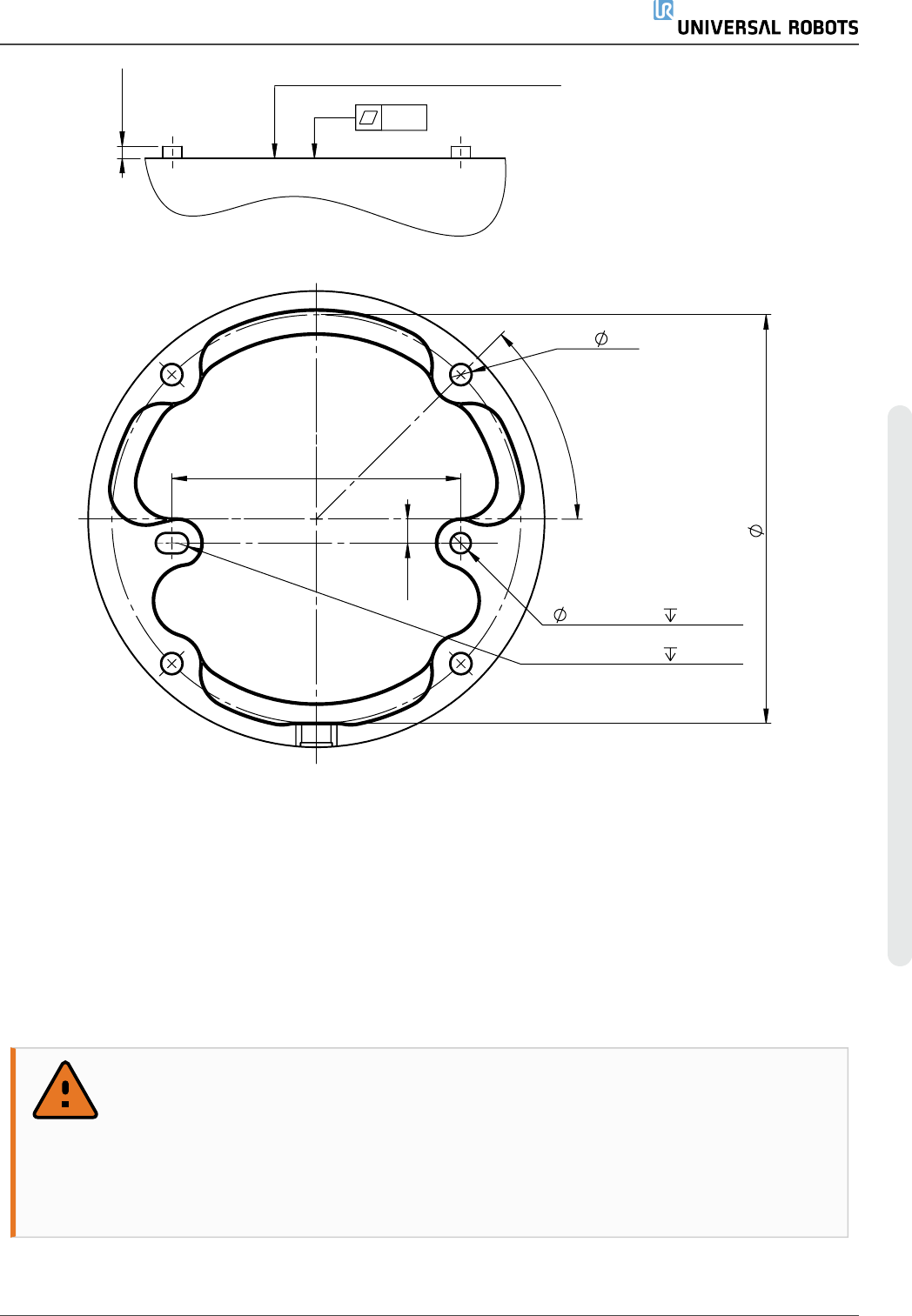
6.1:
机器人安装孔。使用四颗 M8 螺栓。所有测量值均以 mm 为单位。
工 具
机器人工具法兰有四个 M6 螺纹孔,可用于将工具连接到机器人。M6 螺栓必须使用 8 Nm 的扭
矩拧紧,其强度等级为 8.8。为了准确地调整工具位置,请在预留的 Ø6 孔中使用销钉。图 6.2
显示了工具法兰的尺寸和孔模式。建议对销钉使用径向槽孔以避免过度约束,同时保持精确
的位置。安装工具的螺栓不得超过 8mm。M6螺栓太长将压在工具法兰的底部并使机器人短
路。
警告
1. 确保工具正确、牢固地安装到位。
2. 确保工具的构造安全可靠,不会因意外掉落零件而造成危险。
3. 在机器人上安装一个带有延伸超过8毫米M6螺栓的工具可能会推入工具
法兰并造成无法修复的损坏,从而导致更换端部接头。
用 户 手 册 25 UR16e
5.机 械接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
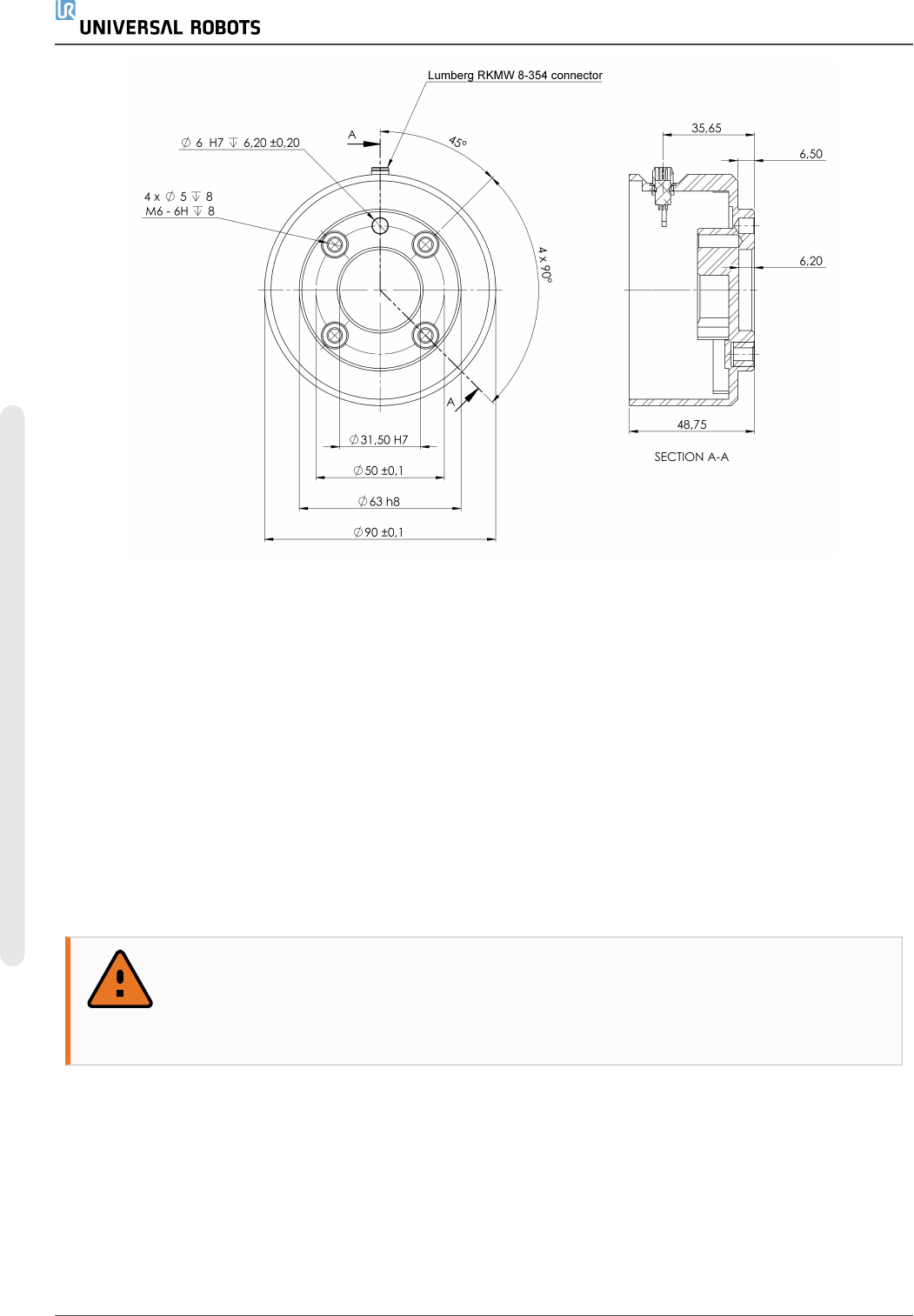
6.2:
工具输出法兰 (ISO 9409-1-50-4-M6) 是机器人顶端的工具安装位置。所有测量值均以
mm 为单位。
控 制 箱
控制箱既可以悬挂在墙壁上,也可以安放在地面上。控制箱每侧应留出 50 mm 的空隙,以确保
空气流通顺畅。
示 教 盒
示教盒可以悬挂在墙壁或控制箱上。确认电缆不会引起绊倒危险。
您可以购买额外的支架来安装控制箱和示教盒。
警告
1. 确保控制箱、示教盒和电缆不接触液体。潮湿的控制箱可导致致命伤害。
2. 将示教盒 (IP54) 和控制箱 (IP44) 放置在适合 IP 等级的环境中。
5.4. 最大有效载荷
机器人手臂的最大允许有效载荷取决于有效载荷的
重心偏移
,请参见图 5。
重心偏移定义为工具法兰的中心与附加的有效载荷重心之间的距离。
在拾取和放置应用中计算有效载荷质量时,需要考虑抓手和抓手抓住的物体。
UR16e 26 用 户 手 册
5.机 械接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
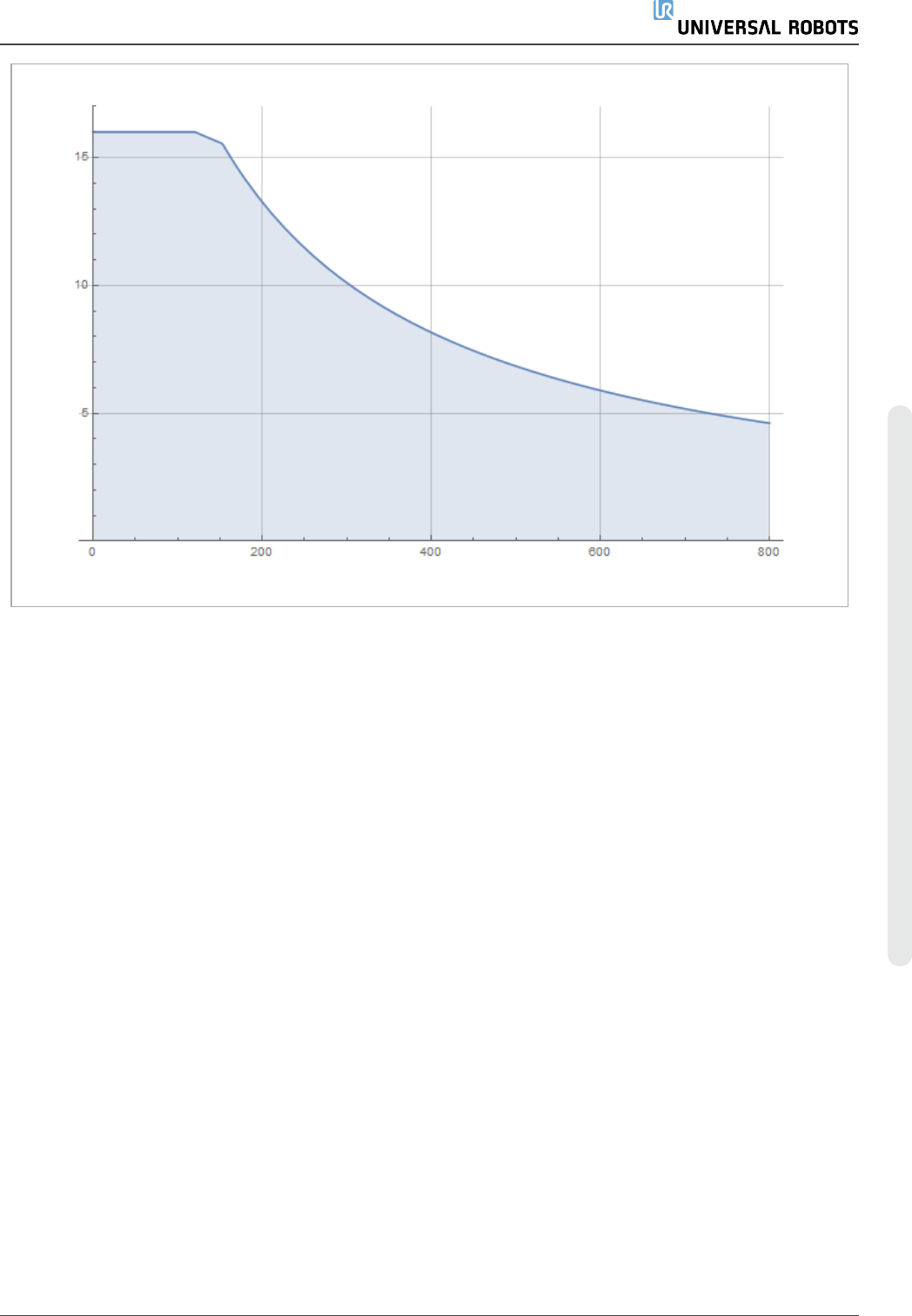
Payload [kg]
重心偏移 [mm]
6.3:
最大允许有效载荷与重心偏移之间的关系。
用 户 手 册 27 UR16e
5.机 械接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。