99469_UR16e_User_Manual_zh_Global.pdf - 第47页
紧 急 停 机 防 护 停 止 程 序 执 行 暂 停 暂 停 驱 动 电 源 关 开 重 置 手 动 自 动 或 手 动 使 用 频 率 不 常 使 用 不 超 过 每 运 行 周 期 一 次 需 要 重 新 初 始 化 仅 释 放 制 动 器 否 停 机 类 别 (IE C 6020 4-1) 1 2 监 控 功 能 的 性 能 等 级 (ISO 1384 9-1) PLd PLd 使 用 可 配 置 的 I/O 设 置 紧 急 …
*3.5A 持续 500ms 或 33% 占空比。
数字 I/O 的构建遵循 IEC 61131-2。电气规范如下所示。
终端 参数 最小值 类型 最大值 单位
数字输出
[COx / DOx]
电流* 0 - 1 A
[COx / DOx]
电压降 0 - 0.5 V
[COx / DOx]
漏电流 0 - 0.1 mA
[COx / DOx]
功能 - PNP - 类型
[COx / DOx]
IEC 61131-2 - 1A - 类型
数字输入
[EIx/SIx/CIx/DIx]
电压 -3 - 30 V
[EIx/SIx/CIx/DIx]
OFF 区域 -3 - 5 V
[EIx/SIx/CIx/DIx]
ON 区域 11 - 30 V
[EIx/SIx/CIx/DIx]
电流 ( 11-30V) 2 - 15 mA
[EIx/SIx/CIx/DIx]
功能 - PNP + - 类型
[EIx/SIx/CIx/DIx]
IEC 61131-2 - 3 - 类型
*对于最大 1H 的电阻负载或电感性负载。
提示
可配置一词用于可配置为安全 I/O 或普通 I/O 的 I/O。这些是带黑色文字的黄色
端子。
6.4.2. 安全 I/O
本节将介绍专用安全输入( 带红色文字的黄色端子) 和配置为安全 I/O 时的可配置 I/O( 带黑色
文字的黄色端子) 。遵守6.4.1. 所有数字 I/O 的通用规范 上一页一节中关于所有数字 I/O 的通用
规范。
安全装置和设备必须按照2.安全 在本页7一章中的安全说明和风险评估进行安装。
所有安全 I/O 成对存在( 冗余) ,并且必须保留成两个独立的分支。单一故障不会导致丧失安全
功能。
有两种固定的安全输入:
• 机器人紧急停止仅用于紧急停止设备
• 防护停止用于保护设备
功能差异如下所示。
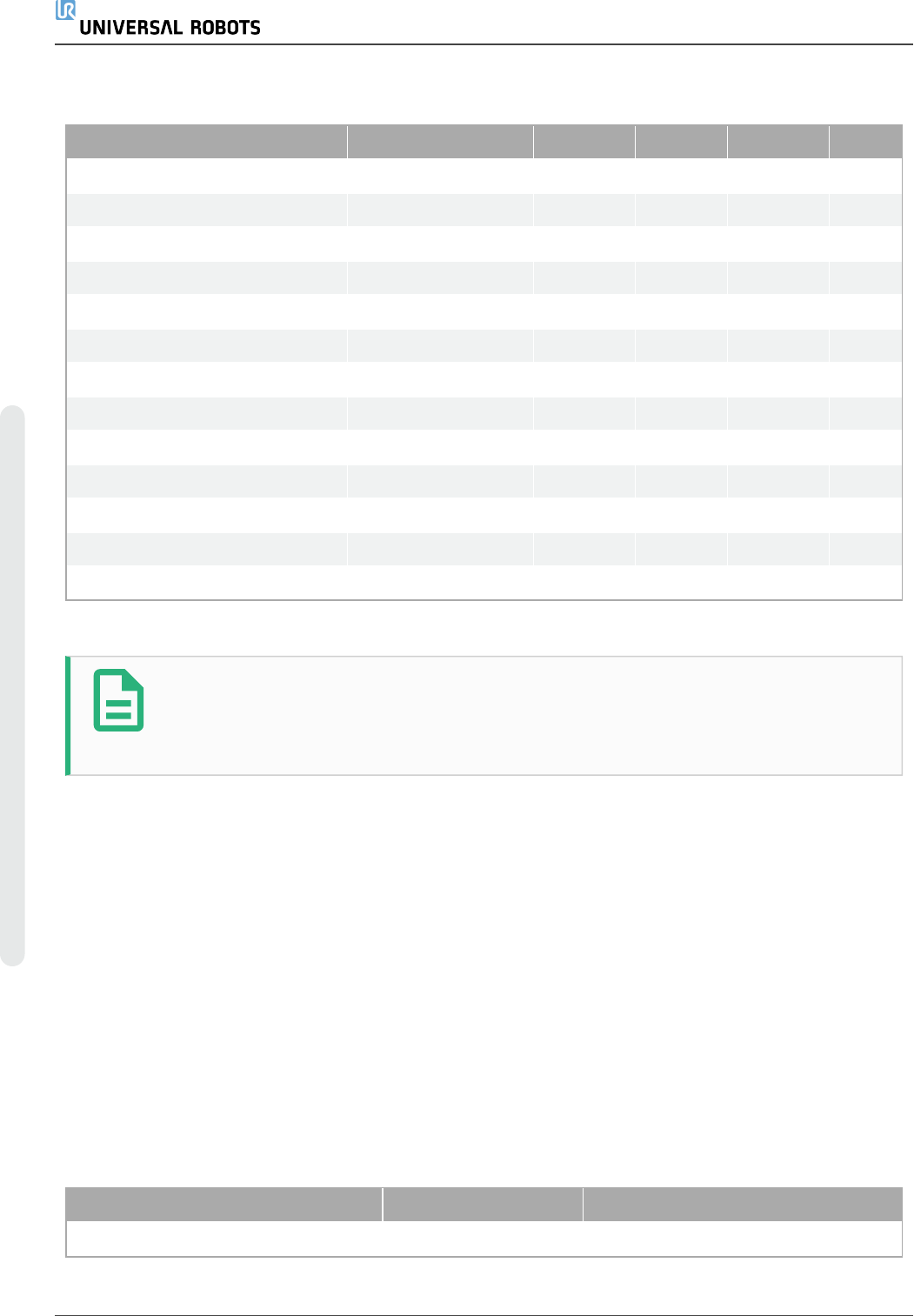
紧急停机 防护停止
机器人停止运动 是 是
UR16e 32 用 户 手 册
6.电 气接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
紧急停机 防护停止
程序执行 暂停 暂停
驱动电源 关 开
重置 手动 自动或手动
使用频率 不常使用 不超过每运行周期一次
需要重新初始化 仅释放制动器 否
停机类别 (IEC60204-1) 1 2
监控功能的
性能等级 (ISO 13849-1) PLd PLd
使用可配置的 I/O 设置紧急停止输出等其他安全 I/O 功能。有关如何通过 GUI 为安全功能配置
一组可配置的 I/O,请参阅第 II 部分PolyScope 手册 在本页87。
警告
1. 切勿将安全信号连接到安全等级不合适的非安全型 PLC。如果不遵守该
警告,有可能会造成严重的人员伤亡,因为安全功能有可能失效。务必将
安全接口信号与普通 I/O 接口信号分开。
2. 所有安全型 I/O 均具备冗余性( 两个独立通道) 。保持两个通道独立,可确
保在发生单一故障时不会丧失安全功能。
3. 在将机器人投入使用前,务必检验安全功能。必须定期测试安全功能。
4. 机器人的安装需遵循这些规格。如果不遵循这些规格,有可能会造成严
重的人员伤亡,因为安全功能有可能失效。
OSSD 信 号
过滤所有配置和永久安全输入,以允许使用脉冲长度小于3ms的OSSD安全设备。安全输入每
毫秒采样一次,输入状态由最近7毫秒内最常见的输入信号决定。安全输出的 OSSD 脉冲在第
II 部分PolyScope 手册 在本页87中进行了详细说明。
默 认 安 全 配 置
所交付的机器人进行了默认配置,可在没有任何附加安全设备的情况下进行操作,请参阅下
图。
24V
EI1
24V
SI0
24V
SI1
24V
EI0
Safety
Safeguard Stop
Emergency Stop
用 户 手 册 33 UR16e
6.电 气接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
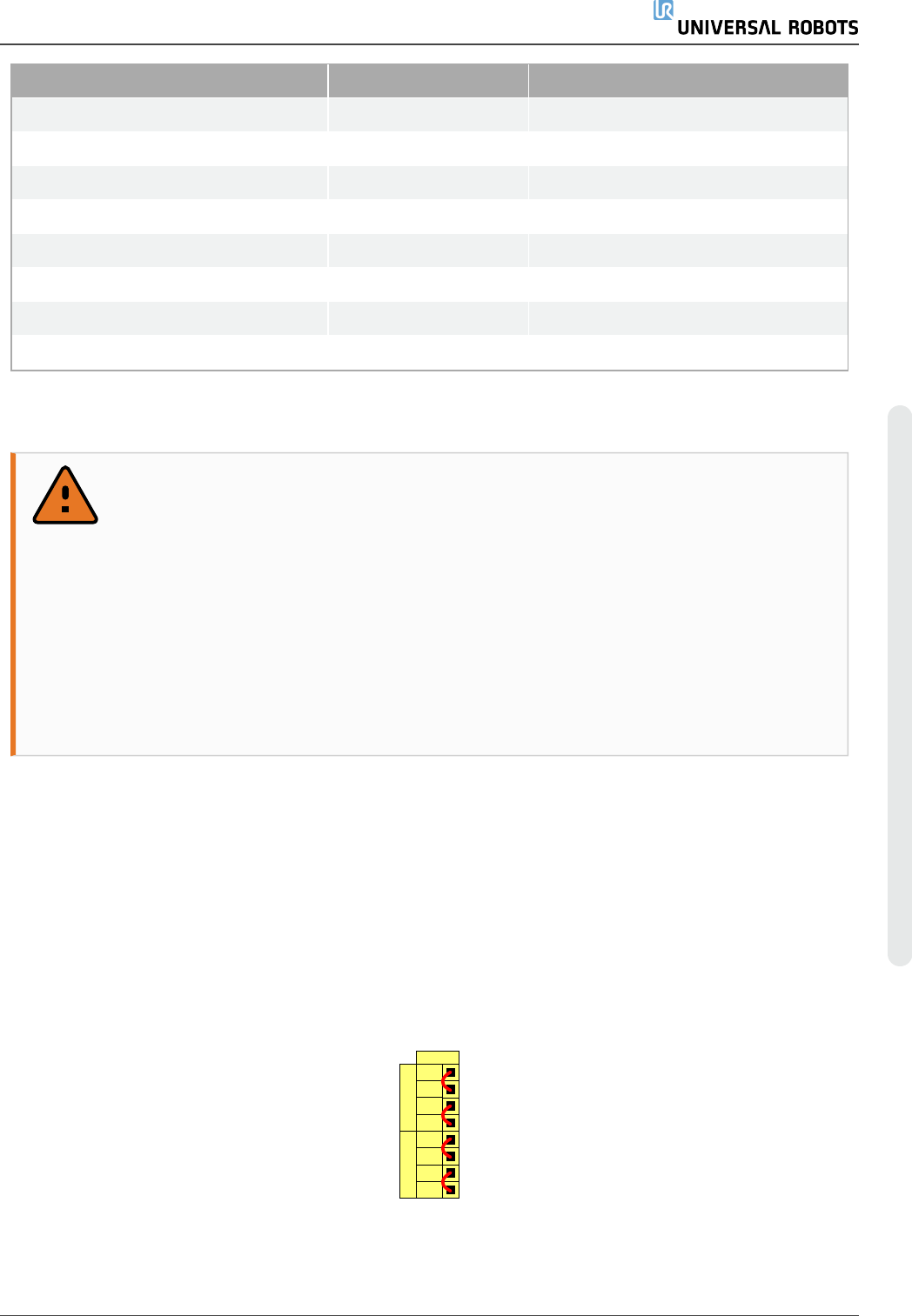
连 接 紧 急 停 止 按 钮
在大多数应用中,需要使用一个或多个额外的紧急停止按钮。下图显示了如何连接一个或多
个紧急停止按钮。
24V
EI1
24V
SI0
24V
SI1
24V
EI0
Safety
Safeguard Stop
Emergency Stop
24V
EI1
24V
SI0
24V
SI1
24V
EI0
Safety
Safeguard Stop
Emergency Stop
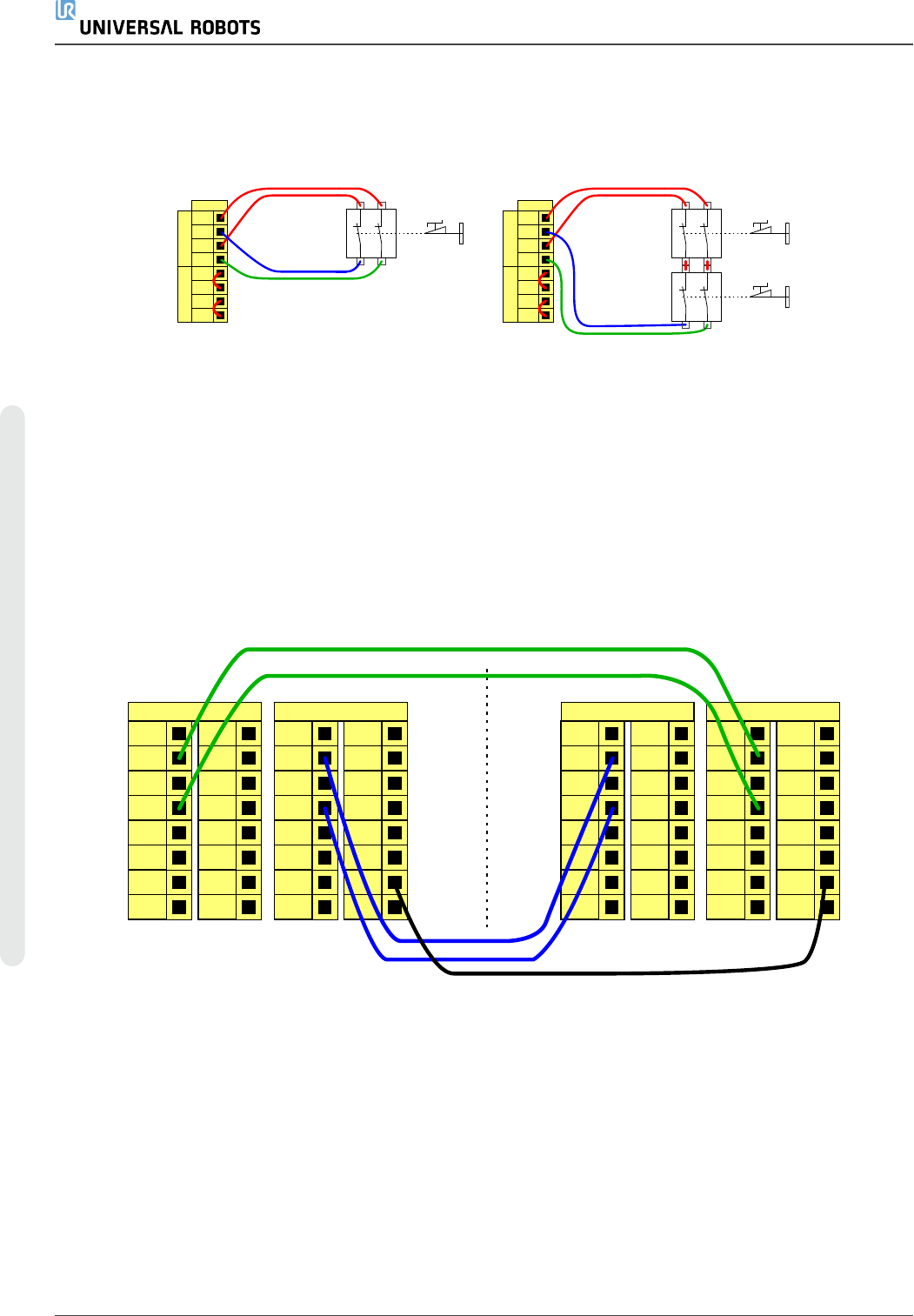
与 其 他 机 器 共 享 紧 急 停 止
您可以通过在图形用户界面配置以下 I/O 功能,来设置机器人与其他机器之间的共享紧急停
止功能。机器人紧急停止输入不能用于共享目的。如果需要连接两台以上的 UR 机器人或其他
机器,需要使用安全 PLC 来控制紧急停止信号。
• 可配置的输入对:外部紧急停止。
• 可配置的输出对:系统紧急停止。
下图显示了 UR 机器人如何共享紧急停止功能。在本例中,使用的配置 I/O 为 CI0-CI1 和 CO0-
CO1。
24V
CI1
24V
CI2
24V
CI3
24V
CI0
Configurable Inputs
24V
CI5
24V
CI6
24V
CI7
24V
CI4
0V
CO1
0V
CO2
0V
CO3
0V
CO0
Configurable Outputs
0V
CO5
0V
CO6
0V
CO7
0V
CO4
24V
CI1
24V
CI2
24V
CI3
24V
CI0
Configurable Inputs
24V
CI5
24V
CI6
24V
CI7
24V
CI4
0V
CO1
0V
CO2
0V
CO3
0V
CO0
Configurable Outputs
0V
CO5
0V
CO6
0V
CO7
0V
CO4
A
B
可 自 动 恢 复 的 防 护 停 止
门开关就是基本防护停止设备的一个例子,门打开时,机器人停止( 参见下图) 。
UR16e 34 用 户 手 册
6.电 气接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。